【雷达系统全揭秘】:从基础原理到应用技术,掌握雷达系统设计与维护
发布时间: 2025-01-02 22:38:44 阅读量: 12 订阅数: 13 

嵌入式系统/ARM技术中的汽车防撞雷达系统的设计与实现
# 摘要
雷达系统作为重要的传感技术,在监测、导航和通信等多个领域发挥着关键作用。本文从基础原理出发,详细介绍了雷达信号的发射、接收、检测、识别以及成像和解析技术。进一步探讨了雷达系统的关键技术,包括信号处理、数据处理和网络通信技术。同时,文中分析了雷达系统的不同应用场景,如地面、空中和海事应用,并对雷达系统的维护、故障排除和性能测试提出了指导性建议。最后,本文展望了雷达技术的未来发展趋势,包括技术创新、智能化和自动化以及环境适应性优化技术,旨在为雷达系统的研究与应用提供参考和指导。
# 关键字
雷达系统;信号处理;数据处理;网络通信;故障诊断;智能化雷达
参考资源链接:[雷达系统导论 Introduction to Radar Systems Third Edition (Merrill I. Skolnik)](https://wenku.csdn.net/doc/6465c2d65928463033d05639?spm=1055.2635.3001.10343)
# 1. 雷达系统的基本概念和原理
## 1.1 雷达系统的定义与历史
雷达系统是利用无线电波探测目标并通过反射波分析目标特性的电子系统。它通过发射电磁波,然后接收目标反射回来的波来确定目标的距离、速度和方向。雷达技术自20世纪初诞生以来,经历了从最初的无线电波到现代复杂脉冲压缩雷达的发展历程,广泛应用于军事、民用航空、气象监测、交通控制和科学研究等领域。
## 1.2 雷达信号的传播与反射原理
雷达信号的传播遵循电磁波传播的基本原理,即在真空中以光速传播,而在介质中速度会因介质的电磁特性而降低。当雷达信号遇到具有不同电磁特性的目标时,部分能量会被反射,反射信号的强度和时延被雷达接收系统检测并分析,从而提取目标的距离、速度等信息。信号反射的强弱受到目标表面材料、形状和波束入射角等因素的影响。
## 1.3 雷达方程与主要参数
雷达方程是描述雷达系统性能的基础,它包括发射功率、天线增益、目标截面积、雷达截面积(RCS)、传播损失、噪声系数和信号处理增益等参数。通过雷达方程可以计算出雷达的探测范围和分辨率,以及雷达信号在发射和接收过程中的各种损失和增益,对于理解雷达系统的设计和优化至关重要。
# 2. 雷达信号处理技术
## 2.1 雷达信号的发射和接收
### 2.1.1 发射信号的调制和编码
在雷达系统中,发射信号的调制和编码是确保有效检测和距离分辨率的关键步骤。调制技术包括连续波(CW)调制和脉冲调制,脉冲调制又细分为线性调频(LFM)脉冲压缩、相位编码脉冲和频率编码脉冲等。调制过程通过改变信号的频率、相位或幅度来携带信息。
```python
import numpy as np
import matplotlib.pyplot as plt
# 模拟一个线性调频(LFM)信号
def lfm_signal(f0, T, K):
t = np.arange(0, T, 1/8e6) # 采样率 8 MHz
fs = np.exp(1j * np.pi * K * t**2)
return np.exp(2j * np.pi * f0 * t) * fs
# 参数设置
f0 = 3e9 # 中心频率 3 GHz
T = 1e-6 # 脉冲宽度 1 μs
K = 1e12 # 频率斜率
# 生成LFM信号
signal = lfm_signal(f0, T, K)
# 可视化LFM信号
plt.figure(figsize=(12, 6))
plt.plot(np.real(signal), label='Real Part')
plt.plot(np.imag(signal), label='Imaginary Part')
plt.title('Linear Frequency Modulated Signal')
plt.xlabel('Time [s]')
plt.ylabel('Amplitude')
plt.legend()
plt.grid()
plt.show()
```
在这段代码中,我们模拟了一个LFM信号并可视化了它的实部和虚部。LFM信号是脉冲压缩技术中的一个重要组成部分,可以提高雷达的分辨率和检测能力。参数`f0`是中心频率,`T`是脉冲宽度,`K`是频率斜率。代码执行后会显示信号的波形,有助于理解LFM信号的特性。
### 2.1.2 接收信号的放大和滤波
接收信号的放大和滤波是信号处理的重要组成部分,其目的是提高信号的信噪比,同时滤除不必要的干扰。这一过程通常通过射频放大器和带通滤波器实现。带通滤波器仅允许特定频率范围内的信号通过,从而抑制噪声和杂波。
```mermaid
graph LR
A[射频接收器] --> B[低噪声放大器]
B --> C[混频器]
C --> D[中频带通滤波器]
D --> E[中频放大器]
E --> F[模数转换器]
```
在这个流程图中,我们可以看到信号在接收路径上经过的各个步骤。首先,射频接收器捕获信号,然后通过低噪声放大器增强信号。接着,信号与本地振荡器混频以转换到中频。中频带通滤波器用于滤除不需要的频率成分,随后信号再次被放大,并最终经过模数转换器转换成数字信号,以供进一步处理。
## 2.2 雷达信号的检测和识别
### 2.2.1 目标的检测方法
在雷达信号处理中,目标检测是核心任务之一。通过检测信号中的回波,可以确定目标的存在和位置。常用的检测方法有恒虚警率(CFAR)检测和匹配滤波器检测。CFAR检测器是一种自适应门限检测器,能够调整门限值以适应不同的背景噪声水平,从而保持恒定的虚警率。
```python
import numpy as np
import scipy.signal as signal
# 生成噪声信号
def generate_noise(size):
return np.random.normal(0, 1, size)
# CFAR检测函数
def cfar_detection(noise_signal, cell_averages, guard_cells, test_cells):
threshold = np.mean(cell_averages) * (1 + guard_cells / test_cells)
return np.where(noise_signal > threshold, 1, 0)
# 模拟噪声和信号
noise = generate_noise(1000)
signal_with_noise = noise + generate_noise(10)
# CFAR参数
cell_averages = noise[1:-1]
guard_cells = 10
test_cells = 1
# 执行CFAR检测
detection_result = cfar_detection(signal_with_noise, cell_averages, guard_cells, test_cells)
# 可视化CFAR检测结果
plt.figure(figsize=(12, 6))
plt.plot(signal_with_noise)
plt.plot(detection_result, color='r', label='Detection Result')
plt.legend()
plt.title('CFAR Detection')
plt.xlabel('Sample Index')
plt.ylabel('Amplitude')
plt.grid()
plt.show()
```
这段代码展示了一个简单的CFAR检测器的实现。首先,我们生成了随机噪声信号和含有噪声的信号。然后定义了一个CFAR检测函数,该函数计算基于周围单元平均值的门限,并检测高于门限的信号。最后,我们通过图表可视化了检测结果。
### 2.2.2 信号的特征提取和分类
信号的特征提取和分类用于从接收到的信号中提取出有用信息,并对目标进行分类。提取的特征可能包括信号的形状、频率、能量等。分类算法如支持向量机(SVM)或神经网络(NN)可用于分析这些特征,并确定目标的类型。
```python
from sklearn.svm import SVC
from sklearn.preprocessing import StandardScaler
from sklearn.model_selection import train_test_split
from sklearn.metrics import classification_report
# 假设有一个特征集和对应的标签集
features = np.array([...]) # 特征数据
labels = np.array([...]) # 对应的标签数据
# 特征标准化
scaler = StandardScaler()
features_scaled = scaler.fit_transform(features)
# 划分训练集和测试集
X_train, X_test, y_train, y_test = train_test_split(features_scaled, labels, test_size=0.2, random_state=42)
# 使用SVM进行分类
clf = SVC(kernel='linear')
clf.fit(X_train, y_train)
# 对测试集进行分类并评估结果
y_pred = clf.predict(X_test)
print(classification_report(y_test, y_pred))
```
该代码展示了如何使用SVM对信号特征进行分类。首先,我们加载特征数据和标签数据。然后,使用`StandardScaler`对特征数据进行标准化处理,以提高分类器的性能。接下来,将数据集划分为训练集和测试集,并使用线性核的SVM进行训练。最后,评估分类器在测试集上的性能,通过`classification_report`输出分类的详细报告。
## 2.3 雷达信号的成像和解析
### 2.3.1 雷达图像的生成方法
雷达图像的生成通常涉及到合成孔径雷达(SAR)技术,这是一种能够生成高分辨率雷达图像的高级技术。SAR通过记录雷达波返回的时间和相位信息,合成一张类似光学摄影的图像,能够用于地形测绘、灾害监测等应用。
```python
# SAR成像算法示例(伪代码,展示基本概念)
def sar_imaging(radar_data):
# 对雷达数据进行傅里叶变换以获取频域信息
频域数据 = 快速傅里叶变换(radar_data)
# 进行距离压缩和方位压缩处理
压缩数据 = 距离方位压缩(频域数据)
# 通过逆傅里叶变换生成图像
sar_image = 逆快速傅里叶变换(压缩数据)
return sar_image
# 假设有一个雷达数据集
radar_data = np.array([...])
# 执行SAR成像
sar_image = sar_imaging(radar_data)
# 可视化SAR图像
plt.imshow(np.abs(sar_image), cmap='gray')
plt.title('SAR Image')
plt.xlabel('Sample Index')
plt.ylabel('Sample Index')
plt.colorbar()
plt.show()
```
伪代码展示了SAR成像的一般流程。首先,对雷达采集的数据进行快速傅里叶变换,获取频域信息。随后,进行距离压缩和方位压缩处理,最后通过逆傅里叶变换生成最终的SAR图像。代码中的`sar_imaging`函数对输入的雷达数据进行处理,并返回生成的图像。图像生成后,通过热图展示SAR图像。
### 2.3.2 图像的解析和处理技术
雷达图像的解析涉及从图像中提取出有价值的信息,例如地物分类、变化检测等。通过图像处理技术如边缘检测、纹理分析和模式识别,可以对图像进行详细解析。这些技术的应用提高了雷达图像在各种应用场景中的利用价值。
```python
from skimage.feature import canny
from skimage.filters import threshold_otsu
# 假设有一个SAR图像
sar_image = np.array([...])
# 边缘检测
edges = canny(sar_image)
# 二值化处理
threshold = threshold_otsu(sar_image)
binary_image = sar_image > threshold
# 可视化结果
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(12, 6))
ax1.imshow(sar_image, cmap='gray')
ax1.set_title('Original SAR Image')
ax2.imshow(binary_image, cmap='gray')
ax2.set_title('Binary Image after Thresholding')
plt.show()
```
在这段代码中,我们使用了`skimage`库中的`canny`函数来检测图像边缘,并用`threshold_otsu`函数计算全局阈值进行二值化处理。通过这些步骤,可以更容易地对SAR图像进行特征提取和后续分析。通过图表可视化原始SAR图像和二值化处理后的图像,可以直观地看到图像处理的效果。
# 3. 雷达系统的关键技术
## 3.1 雷达系统的信号处理技术
### 3.1.1 信号的数字化和压缩技术
雷达系统采集到的模拟信号经过接收机转换成数字信号,这一过程称为信号数字化。数字化后的信号需要压缩来降低存储和传输需求,同时也提高了信号处理的效率。
#### 数字化过程
信号数字化是指采用模数转换器(ADC)将模拟信号转换为数字信号的过程。数字化的关键参数包括采样率、位深度和量化误差。
- **采样率**:根据奈奎斯特定理,采样率至少应为信号最高频率的两倍,以避免混叠现象。
- **位深度**:决定了信号可以量化成多少个离散电平,影响信号的动态范围。
- **量化误差**:由于无法完全精确地量化信号,因此存在误差,通常需要通过适当的算法减少量化误差。
#### 压缩技术
压缩技术可以分为无损压缩和有损压缩。在雷达系统中,通常采用无损压缩以保证数据的完整性。
- **无损压缩**:利用数据冗余性,通过编码技术去除数据中的冗余部分,从而减少数据量。例如Huffman编码或Lempel-Ziv-Welch(LZW)编码。
- **有损压缩**:在允许一定程度的失真下,减少数据量。例如JPEG压缩格式。
#### 实现示例代码
```c
#include <stdio.h>
#include <stdlib.h>
// 假设输入为模拟信号数组,输出为数字化后的数组
void digitizeSignal(const float* analogSignal, int* digitalSignal, int length, int sampleRate, int bitDepth) {
// 这里简化处理,仅作为示例展示信号数字化过程
for (int i = 0; i < length; ++i) {
// 简化的模数转换
int level = analogSignal[i] * ((1 << bitDepth) - 1); // 将模拟信号映射到数字电平
digitalSignal[i] = level;
}
}
int main() {
float analogSignal[1024] = {0}; // 模拟信号数组
int digitalSignal[1024] = {0}; // 数字信号数组
// 假设信号长度为1024
digitizeSignal(analogSignal, digitalSignal, 1024, 1000, 8); // 1000Hz采样率, 8位深度
return 0;
}
```
### 3.1.2 信号的去噪和增强技术
信号在传输过程中可能受到多种噪声的干扰,去噪和增强技术用于提高信号的清晰度和可信度。
#### 去噪技术
常用的去噪技术包括低通滤波器、带通滤波器、中值滤波等。去噪的目的是移除信号中的噪声成分,保留目标信号。
- **低通滤波器**:移除高频噪声。
- **带通滤波器**:只允许特定频率范围的信号通过。
- **中值滤波**:基于统计排序,适用于去除脉冲噪声。
#### 增强技术
信号增强是指提高信号中感兴趣部分的显著度,增强技术包括:
- **增益调整**:根据信号的动态范围调整其幅度。
- **对比度提升**:调整信号的对比度使其更容易区分。
#### 实现示例代码
```c
// 信号去噪示例 - 简单的移动平均滤波器
float* noiseRemoval(const float* noisySignal, int length, int windowSize) {
float* cleanSignal = (float*)malloc(length * sizeof(float));
for (int i = 0; i < length; ++i) {
float sum = 0;
for (int j = i; j < i + windowSize; ++j) {
if (j < length) {
sum += noisySignal[j]; // 计算窗口内信号总和
}
}
cleanSignal[i] = sum / windowSize; // 计算平均值
}
return cleanSignal;
}
```
> 请注意,这里的代码仅为信号去噪和数字化过程的简化示例,并不是真实雷达系统的处理代码。实际应用中,需要更复杂的算法和优化技术。
# 4. 雷达系统的应用实践
雷达技术自诞生以来,已经广泛应用于军事、民事等多个领域。本章节将重点探讨雷达系统在地面、空中和海事应用中的不同场景,并结合实际案例展示雷达技术如何解决实际问题。
## 4.1 雷达系统的地面应用
### 4.1.1 地面监测雷达的应用
地面监测雷达,顾名思义,是在地面部署,用于监测和跟踪地面、低空、海面目标的雷达系统。这类雷达通常包括气象雷达、交通监控雷达、边境监测雷达等。
一个典型的地面监测雷达应用是交通监控。交通监控雷达通过监测车辆的移动速度,可以帮助交通管理部门实现交通流量的实时监测、交通违规检测以及交通拥堵预警。
```python
# 示例代码:交通监控雷达数据处理
import numpy as np
import matplotlib.pyplot as plt
# 假设数据:雷达捕获的时间序列数据
time = np.linspace(0, 10, 1000)
vehicle_speed = np.sin(time) * 20 + 50 # 一个车辆速度模拟数据,基础速度为50 km/h
# 数据处理:滤波和特征提取
filtered_data = np.convolve(vehicle_speed, np.ones(3)/3, mode='valid') # 平滑滤波
peaks, _ = plt.find_peaks(vehicle_speed, height=20) # 提取速度变化的峰值点
# 结果展示:绘制原始速度曲线和滤波后曲线
plt.figure(figsize=(10, 5))
plt.plot(time[:len(filtered_data)], vehicle_speed[:len(filtered_data)], label='Original Speed')
plt.plot(time[2:-2], filtered_data, label='Filtered Speed', color='red')
plt.scatter(time[peaks], vehicle_speed[peaks], color='green', label='Peaks')
plt.xlabel('Time (s)')
plt.ylabel('Speed (km/h)')
plt.legend()
plt.show()
```
在上述代码中,我们模拟了雷达捕获的车辆速度数据,并通过滤波算法对数据进行平滑处理。此外,我们还利用`find_peaks`函数找到了速度变化的峰值点,这些峰值点可能代表交通违规行为。
在现实应用中,交通监控雷达系统会更加复杂,通常需要融合多种传感器数据,并运用先进的数据处理算法来提高监测的准确性和可靠性。
### 4.1.2 地面导航雷达的应用
在现代地面导航中,雷达系统能提供精确的位置信息和目标检测,使车辆能够在复杂环境中安全导航。一个典型的例子是自动驾驶汽车中的雷达系统,如使用毫米波雷达进行车辆周围障碍物的检测和距离测量。
```mermaid
graph LR
A[雷达发射信号] --> B[目标反射]
B --> C[雷达接收反射信号]
C --> D[信号处理]
D --> E[目标位置计算]
E --> F[控制决策]
F --> G[车辆操作]
```
如上图所示,雷达发射信号后,目标物体反射信号,并被雷达接收。信号经过处理后,计算出目标物体的位置,从而为车辆提供控制决策和相应的操作指令。
由于雷达系统在自动驾驶中的应用非常关键,其对精度和实时性有极高要求,因此相关研究不断推动雷达技术向更高的分辨率、更强的抗干扰能力以及更智能化的数据处理方向发展。
## 4.2 雷达系统的空中应用
### 4.2.1 飞机雷达的应用
飞机雷达系统广泛应用于飞行安全、空中交通控制和天气探测等领域。机载雷达系统包括天气雷达、空地雷达、空中交通管制雷达等,能够提供飞行环境的详尽信息,帮助飞行员做出安全和高效的飞行决策。
以天气雷达为例,它能够探测大气中的降水和其他气象现象,比如雷暴、冰雹和龙卷风等。飞行员利用这些信息可以规避不利气象条件,保障飞行安全。
### 4.2.2 卫星雷达的应用
卫星雷达通过搭载在人造卫星上进行地球观测,广泛应用于地形测绘、环境监测、灾害评估等领域。卫星雷达具有覆盖面积广、重复观测周期短的优势,能够提供大尺度、高精度的地球表面和大气信息。
以地形测绘为例,合成孔径雷达(SAR)技术能够穿透云层和植被,获取地表的详细信息。这对于那些经常有云层覆盖或植被遮挡的区域的地形测绘具有重要意义。
## 4.3 雷达系统的海事应用
### 4.3.1 海上监测雷达的应用
海上监测雷达主要应用于海洋安全、环境监控和资源勘探等领域。这类雷达可以检测海上船只的运动状态,监测海面环境变化,以及用于海洋科学研究。
例如,在海上搜救任务中,监测雷达可用于发现遇险船只的位置,通过雷达回波确定其速度和航向,从而提供及时的救援。
### 4.3.2 海上导航雷达的应用
海上导航雷达是船只在海上航行时的重要辅助工具,可以提供周边海域的详细信息,包括其他船只、障碍物、海岸线等。这种雷达对于预防碰撞、确保航行安全至关重要。
例如,船舶在进入繁忙的航道时,需要使用导航雷达来监测周围环境,确保航道顺畅和避免碰撞。
## 本章小结
雷达系统在各个领域的应用显示了其多样性和灵活性。本章首先介绍了地面监测雷达在交通监控和导航中的应用案例,并通过示例代码解释了数据处理的过程。接着,探讨了飞机和卫星雷达在空中监测和天气探测中的运用。最后,本章还探讨了雷达在海上监测和导航中的应用,突显了雷达技术对于保障海上交通安全和资源勘探的重要性。在接下来的章节中,我们将继续了解雷达系统的维护、故障排除以及未来的发展趋势。
# 5. 雷达系统的维护和故障排除
## 5.1 雷达系统的日常维护
### 5.1.1 设备的清洁和保养
为了确保雷达系统的稳定运行和延长其使用寿命,定期进行清洁和保养是至关重要的。维护工作通常包括对天线表面的灰尘、污物的清理,以防止对雷达波传播的影响。此外,还需要定期检查和更换易损部件,比如密封圈和连接器,确保其良好的防水和防尘性能。
```mermaid
graph LR
A[开始维护工作] --> B[清洁天线表面]
B --> C[检查各部件状态]
C --> D[更换密封圈和连接器]
D --> E[润滑运动部件]
E --> F[测试系统功能]
F --> G[记录维护结果]
```
### 5.1.2 软件的更新和升级
随着技术的不断发展,雷达系统的软件也需要定期更新和升级,以确保其运行最新的功能和安全补丁。软件更新通常包括对操作系统的升级,以及对信号处理算法的优化。升级过程中,操作人员应详细记录更新日志,以便于未来可能出现的问题追踪和回溯。
## 5.2 雷达系统的故障诊断
### 5.2.1 常见故障的症状和原因
雷达系统的故障可能由多种原因引起,包括但不限于硬件损坏、软件错误、环境因素以及电磁干扰。常见的故障症状包括信号丢失、系统响应缓慢、数据错误等。分析故障原因时,需要从硬件、软件以及外部环境三个方面进行综合考虑。
| 故障症状 | 可能原因分析 |
| --- | --- |
| 信号丢失 | 天线损坏、射频连接问题、信号处理错误 |
| 系统响应缓慢 | 系统资源过载、软件性能瓶颈、数据存储问题 |
| 数据错误 | 传感器偏差、数据处理算法缺陷、电磁干扰 |
### 5.2.2 故障的诊断和修复方法
在故障诊断阶段,使用工具和测试设备对雷达系统的各个组件进行检测。使用示波器检查信号的完整性,使用频谱分析仪来分析射频信号的质量。一旦定位到故障源头,可以根据故障原因采取相应的修复措施,如更换损坏的硬件组件或调整配置参数。
```mermaid
flowchart LR
A[发现故障] --> B[定位故障部件]
B --> C[使用测试工具检测]
C --> D{故障是否硬件引起}
D --> |是| E[更换硬件]
D --> |否| F{故障是否软件引起}
F --> |是| G[更新或修复软件]
F --> |否| H[检查电磁干扰]
H --> |有| I[解决干扰源]
H --> |无| J[其他未知原因]
E --> K[结束修复流程]
G --> K
I --> K
J --> K
```
## 5.3 雷达系统的性能测试
### 5.3.1 测试设备和方法
为了确保雷达系统的性能符合预期标准,需要定期进行性能测试。测试设备可能包括信号发生器、功率计、频谱分析仪等。测试方法可能包括灵敏度测试、分辨率测试、功率输出测试等。测试过程应严格遵守标准操作流程,以确保结果的准确性和可靠性。
```mermaid
graph LR
A[启动测试] --> B[配置测试设备]
B --> C[执行灵敏度测试]
C --> D[执行分辨率测试]
D --> E[执行功率输出测试]
E --> F[记录测试数据]
F --> G[分析测试结果]
G --> H[完成测试报告]
```
### 5.3.2 测试结果的分析和处理
测试结果的分析对于评估雷达系统的当前性能至关重要。分析应包括对比测试结果与标准指标,识别性能下降的趋势,以及潜在的改进点。对出现的问题应进行深入分析,确保找到根本原因,并制定相应的改进措施。对于性能超出预期的雷达系统,还应分析其优势并考虑将其应用到更广泛的领域。
通过本章节的介绍,我们深入了解了雷达系统的日常维护方法、故障诊断的策略以及性能测试的步骤和分析方法。下一章节将讨论雷达技术的创新和发展趋势,以及雷达系统智能化和自动化的新进展。
# 6. 雷达系统的未来发展趋势
随着科技的快速发展和应用需求的不断提升,雷达系统正面临前所未有的发展机遇和挑战。在这一章中,我们将探讨雷达技术的创新与发展、智能化和自动化以及环境适应性的未来趋势。
## 6.1 雷达技术的创新和发展
### 6.1.1 新型雷达技术的研究进展
近年来,随着微电子技术、信号处理算法以及新材料的发展,雷达技术已经取得了显著的进步。一些新型雷达技术,如毫米波雷达、合成孔径雷达(SAR)、太赫兹雷达等,已经逐步进入人们的研究视野。毫米波雷达由于其波长短、分辨率高的特点,在自动驾驶汽车中得到了广泛的应用。合成孔径雷达(SAR)因其能够在任何天气条件下提供高分辨率的地面图像而被用于遥感探测。太赫兹雷达则因其对化学物质的敏感性和穿透性在安全检测领域显示出了巨大的潜力。
### 6.1.2 雷达技术的发展趋势
未来的雷达技术发展方向可能会集中在更高频率的波段、更先进的信号处理技术和网络化系统集成。例如,高频太赫兹雷达和量子雷达等概念正在被广泛研究。这些技术有望大幅提高雷达的分辨率、灵敏度和多目标识别能力。同时,基于人工智能的信号处理算法将被进一步优化,以实现实时、动态和智能的目标检测与跟踪。
## 6.2 雷达系统的智能化和自动化
### 6.2.1 智能化雷达系统的设计和实现
智能化是雷达系统发展的关键方向之一。未来的雷达系统将集数据采集、处理、识别和决策于一体,通过集成先进的机器学习和深度学习算法,实现自主的目标识别和行为预测。智能化雷达系统能够减少人工干预,提高系统的反应速度和准确性。例如,通过深度学习网络对雷达图像进行分析,实现复杂场景下的目标检测和分类。
### 6.2.2 自动化雷达系统的优势和应用
自动化雷达系统在多个领域都有广阔的应用前景。在空中交通管制领域,自动化雷达能够减少人为错误,提高飞行安全;在军事侦察中,自动化雷达系统能够实现快速部署和高效监测;而在智能交通系统中,自动化雷达则可用于无人驾驶车辆的导航和避障。自动化技术将雷达系统的操作简便化,并大幅降低人力资源成本。
## 6.3 雷达系统的环境适应性
### 6.3.1 雷达系统的抗干扰技术
雷达系统的环境适应性是指其在复杂多变的外部环境中仍能保持稳定的性能。随着雷达应用的增加,其受到的干扰也越来越多,因此,提高雷达系统的抗干扰能力是提高其环境适应性的关键。例如,使用自适应波束形成技术和空间滤波技术,可以有效减少其他电磁设备的干扰,提高信号质量。
### 6.3.2 雷达系统的环境适应性优化技术
未来雷达系统还需要具备良好的环境适应性优化技术。这包括在复杂的气象条件和地形环境下,对信号进行适应性调整以保持雷达图像的清晰度和准确性。例如,采用动态阈值算法可以提高在复杂背景下的目标检测率,而多通道接收技术可以提高对目标的精确跟踪。这些技术的发展将使得雷达系统更加灵活和可靠。
通过本章节的探讨,我们可以看到雷达系统的未来发展趋势将紧密贴合技术创新和实际应用需求。从智能化、自动化到环境适应性,雷达技术的革新将引领该领域向着更高性能、更智能化和更广泛的应用方向发展。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《雷达系统导论》第三版专栏深入探讨了雷达系统的各个方面,从基础原理到先进应用。它涵盖了雷达信号处理、频谱分析、可靠性保障、多传感器数据融合、高分辨率成像、天气雷达、车载雷达、海洋雷达、软件定义雷达、雷达与人工智能、波形设计、维护与故障诊断、信号识别和分类等主题。专栏提供了深入的理论分析和实用的技术技巧,旨在帮助读者掌握雷达系统的设计、维护和应用。无论你是雷达系统的新手还是经验丰富的专业人士,本专栏都能为你提供全面的知识和见解。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
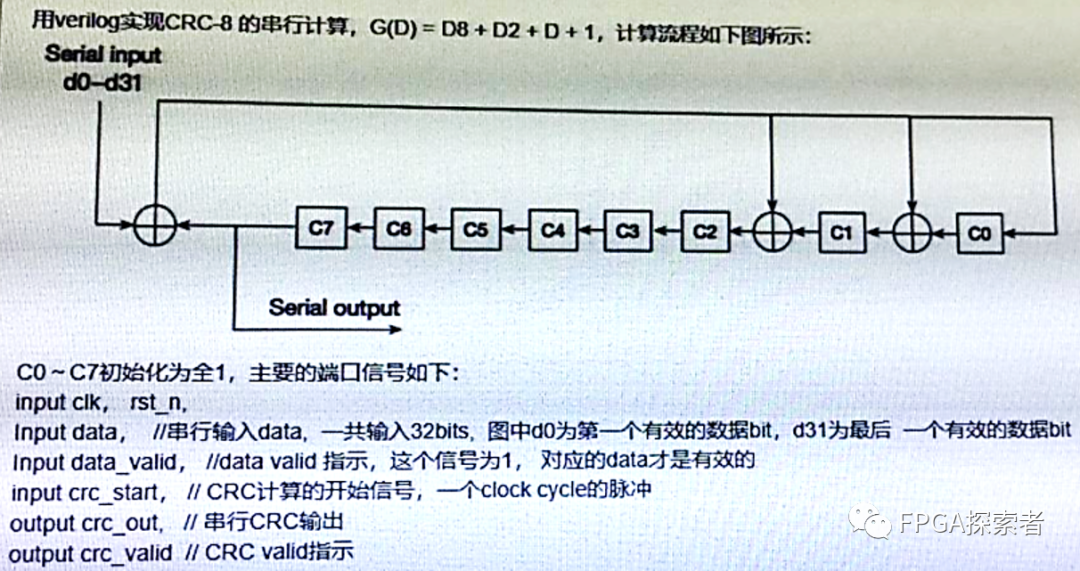
【CRC8校验码:数据完整性守护神】:揭秘数据传输中的安全守护策略
# 摘要
数据完整性是确保数据传输和存储准确无误的关键,而CRC8校验码作为一种高效的数据完整性保护机制,在多个领域中得到了广泛应用。本文首先介绍了CRC8校验码的重要性及基本理论,随后详细探讨了其工作原理和数学模型,并通过编程实现展示了如何在不同环境中应用CRC8。接着,本文分析了CRC8在工业控制、嵌入式系统和软件开发等不同领域的具体应用,以及通过优化策略提升其
【APM新手必读】:APM-2.8.0入门到精通,全面提升监控与优化技能

# 摘要
APM-2.8.0作为一款先进的应用程序性能管理工具,提供了从基础监控到高级性能分析的完整解决方案。本文详细介绍了APM-2.8.0的概念、安装流程以及基础监控功能,包括系统资源监控、应用性能监控和日志管理与分析。同时,本文深入探讨了APM-2.8.0在代码级性能分析
Scara机器人设计必读:运动空间限制的优化设计指南

# 摘要
Scara机器人作为工业自动化领域的关键设备,其设计优化对提高生产效率和灵活性具有重要意义。本文从Scara机器人的设计概述开始,深入分析了运动空间限制的理论基础及其对机器人性能的影响,并通过数学建模和限制因素分析,为优化设计提供了理论支撑。接着,本文探讨了结构优化、仿真验证以及材料与
【提升2D视觉准确性】:深入理解视觉系统中的数学模型

# 摘要
本文综述了2D视觉系统中数学模型的应用及其构建方法,探讨了基础数学概念如向量、矩阵以及几何变换在图像处理中的核心作用,并分析了概率论和统计学在视觉系统噪声建模和特征检测中的重要性。文章进一步阐述了数学模型建立的方法论,关键实现技术和模型优化策略,以及在实际应用中的案例分析。最后,文章指出了2D视觉数学模型面临的挑战,研究前沿趋势,并探讨了深度学习、自适应模型等新
汇川MD800驱动故障诊断与恢复:系统崩溃不慌张
# 摘要
汇川MD800驱动故障是影响设备稳定运行的技术难题。本文首先概述了驱动故障的概念及其分类,并对常见的驱动故障类型进行了分析。接着,深入探讨了驱动故障的根本原因,包括硬件兼容性、驱动程序自身的缺陷以及操作系统兼容性问题。此外,本文介绍了驱动故障诊断的工具与方法,并强调了驱动更新、备份、系统还原点创建和故障应对计划制定的重要性。在实际处理技巧方面,本文提供了详细的排查流程、现场修复操作和系统优化建议。通过案例分析,展示了驱动故障的实战解决策略,最后展望了驱动故障诊断与恢复技术的未来发展,包括人工智能在诊断中的应用、驱动自修复技术以及自动化与智能化诊断系统的发展方向。
# 关键字
驱动故
【Icepak新手必备】:从零开始,5步精通Icepak操作
# 摘要
本文全面介绍了Icepak软件的应用,包括其安装、基本操作、项目管理、网格划分及设置、模拟分析以及高级功能等各个方面。Icepak是一款专注于电子设备热管理的仿真工具,它允许工程师对复杂电子系统进行精确的热分析和优化。文章首先概述了Icepak的应用场景和安装配置要求,随后详细阐述了用户界面的布局和操作流程,以及如何创建和管理Icepak项目。在网格划分与设置方面,本文探讨了不
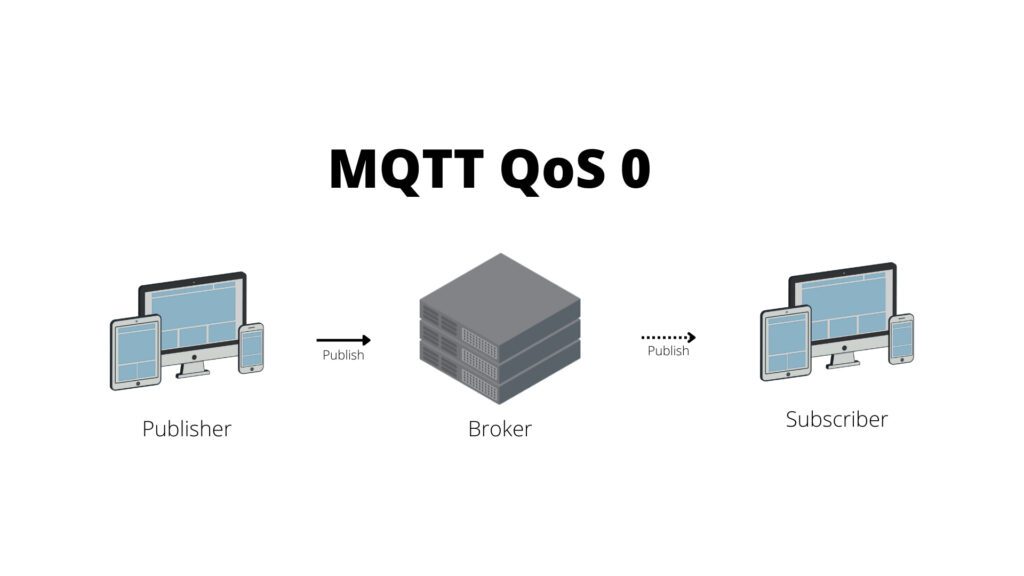
高级MQTT特性解读:掌握QoS、遗嘱消息和保持连接机制
# 摘要
本文深入探讨了MQTT协议的核心组成部分,包括其QoS(服务质量)层级、遗嘱消息与最后遗愿机制以及保持连接机制。通过详细分析QoS的不同等级,本文揭示了它们在消息传递中的实现和高级配置的优化方法。接着,文章探讨了遗嘱消息的功能、配置以及性能优化策略。最后,本文解析了保持连接机制的重要性、管理方法和性能挑战的解决方案,同时通过实战演练展示了这些高级特性在实际应用中的集成和优化案例。
# 关
【LS-PrePost脚本自动化秘籍】:编写脚本提升分析任务效率
# 摘要
LS-PrePost作为一款流行的工程仿真软件,提供了强大的脚本自动化功能,使得复杂的工程仿真任务能够通过脚本高效地实现自动化处理。本文首先介绍了LS-PrePost脚本自动化的基本概念、语言基础和基本结构。随后,深入探讨了自动化任务实践中的关键操作,包括数据处理和实例分析,以及脚本错误处理、外部工具集成和并发处理的进阶技术。文章还涵盖了脚本的优化、维护、版本控制、安全性与编码规范,为脚本的长期可靠运行提供了指导。最后,对脚本自动化在工程仿真领域的发展趋势和应用前景进行了展望,强调了AI和大数据等新技术在提升脚本自动化效率和能力方面的潜力。
# 关键字
LS-PrePost;脚本自
【自然邻居插值探索】:Surfer等值线绘制中被忽视的强大工具

# 摘要
自然邻居插值法是一种先进的空间数据分析技术,它利用Voronoi图和Delaunay三角剖分构建数据点之间的关系,以生成更加精确和自然的插值结果。本文首先介绍了自然邻居插值法的基本概念和理论基础,接着详细探讨了该方法在Surfer软
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )