【Java网络流算法】:Ford-Fulkerson实现与图数据结构应用
发布时间: 2024-09-10 21:45:45 阅读量: 71 订阅数: 26 
# 1. Java网络流算法与Ford-Fulkerson方法
## 1.1 Java中的网络流与算法需求
网络流问题在现实世界中无处不在,从计算机网络数据包的传输到交通网络的流量优化,网络流算法为我们提供了解决这些问题的数学模型和计算工具。在Java中实现网络流算法,特别是经典的Ford-Fulkerson方法,能够帮助我们解决一系列优化问题,如最大流问题、最小割问题等。通过学习和掌握这些算法,开发者不仅能够扩展他们在图论和网络优化方面的知识,还可以在实际工作中应用这些知识来设计和优化复杂系统。
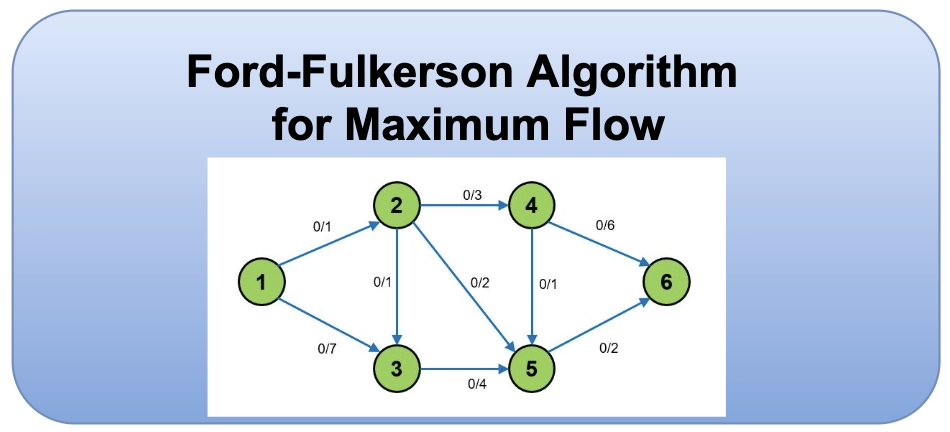
## 1.2 Ford-Fulkerson方法的原理
Ford-Fulkerson方法是一种通过不断寻找增广路径来增加流的算法,直到再也找不到增广路径为止。该方法的核心在于利用残留网络的概念,每一次迭代都是在寻找在当前流量情况下,是否存在一条路径可以使得流量进一步增加。算法的效率依赖于寻找增广路径的方法。在Java中,我们可以使用深度优先搜索(DFS)或广度优先搜索(BFS)来实现这一点。
## 1.3 Java实现的意义与挑战
在Java中实现Ford-Fulkerson方法不仅可以加深对网络流问题的理解,还可以提升解决实际问题的能力。然而,这种算法的实现也面临着一些挑战,比如如何有效地表示图和流网络、如何优化寻找增广路径的过程等。对于有经验的IT从业者而言,理解和掌握这种算法背后的原理,以及如何在Java中进行高效的编码实现,是一项值得探索的挑战。
# 2. 图数据结构基础
### 2.1 图的基本概念
#### 2.1.1 图的定义和表示
图(Graph)是一种非线性数据结构,它由顶点(Vertices)和边(Edges)组成。顶点通常用小写字母表示,边用连接两个顶点的线表示。在图论中,图可以是有向的(directed),也可以是无向的(undirected)。有向图中的边具有方向性,通常表示为一条从一个顶点到另一个顶点的单箭头线,无向图中的边则表示为无方向的线。
图可以表示为邻接矩阵或邻接表。邻接矩阵使用一个二维数组表示顶点之间的连接关系,矩阵中的元素表示是否存在边,对于有权重的图,元素还表示边的权重。邻接表则使用链表来表示每个顶点的邻接顶点,它更适合表示稀疏图。
```java
// 邻接矩阵表示法的简单实现
public class Graph {
private int[][] adjacencyMatrix;
private int vertices;
public Graph(int vertices) {
this.vertices = vertices;
adjacencyMatrix = new int[vertices][vertices];
}
public void addEdge(int source, int destination) {
adjacencyMatrix[source][destination] = 1; // 有向图
}
public void printGraph() {
for (int[] row : adjacencyMatrix) {
for (int val : row) {
System.out.print(val + " ");
}
System.out.println();
}
}
}
```
#### 2.1.2 图的遍历算法
图的遍历算法有深度优先搜索(DFS)和广度优先搜索(BFS)。DFS通过递归方式遍历所有顶点,而BFS使用队列结构来实现逐层访问。
```java
// 深度优先搜索示例
public void DFS(int vertex) {
boolean[] visited = new boolean[vertices];
DFSUtil(vertex, visited);
}
private void DFSUtil(int vertex, boolean[] visited) {
visited[vertex] = true;
System.out.print(vertex + " ");
for (int i = 0; i < vertices; i++) {
if (adjacencyMatrix[vertex][i] == 1 && !visited[i]) {
DFSUtil(i, visited);
}
}
}
// 广度优先搜索示例
public void BFS(int startVertex) {
boolean[] visited = new boolean[vertices];
Queue<Integer> queue = new LinkedList<>();
visited[startVertex] = true;
queue.offer(startVertex);
while (!queue.isEmpty()) {
int currentVertex = queue.poll();
System.out.print(currentVertex + " ");
for (int i = 0; i < vertices; i++) {
if (adjacencyMatrix[currentVertex][i] == 1 && !visited[i]) {
visited[i] = true;
queue.offer(i);
}
}
}
}
```
### 2.2 加权图和最短路径
#### 2.2.1 加权图的特点
加权图是图的一种,其边被赋予了权重(weight)。这些权重代表了连接顶点的边的重要性或距离。在最短路径问题中,目标是在两个顶点之间找到一条权重和最小的路径。
#### 2.2.2 最短路径算法概述
为了找到加权图中的最短路径,可以使用多种算法,如Dijkstra算法、Bellman-Ford算法等。Dijkstra算法适用于没有负权边的图,而Bellman-Ford算法可以处理带有负权边的图,但不能有负权环。
### 2.3 网络流与割的理论基础
#### 2.3.1 流网络的定义
流网络是图的一种特殊形式,通常表示为G=(V,E,c,s,t)。V表示顶点集合,E表示边集合,c表示边的容量函数,s表示源点,t表示汇点。在网络流中,每条边都有一个容量限制,而流的值不能超过这个容量。
#### 2.3.2 割的定义和性质
割在网络流问题中表示为一组边的集合,当从图中移除这些边后,会使得从源点到汇点的流量降低。割的容量是割中所有边容量的和。最小割问题是找到使得从源点到汇点的流量最小的割。
通过定义和理解图数据结构的基础,我们为后续深入分析Ford-Fulkerson算法及其应用建立了坚实的基础。接下来的章节将介绍算法的理论细节和实现。
# 3. Ford-Fulkerson算法理论详解
## 3.1 算法原理和步骤
### 3.1.1 增广路径的概念
在Ford-Fulkerson算法中,增广路径是指从源点到汇点的一条路径,在这条路径上,每条边都至少有一个未达到其容量限制的"余量"。这样的路径能够允许更多的流量从源点流向汇点,增加网络中整体的流量。寻找增广路径是Ford-Fulkerson算法的核心任务之一,它是迭代进行的,直到无法再找到增广路径为止。
增广路径的寻找通常利用深度优先搜索(DFS)或广度优先搜索(BFS)算法实现。在算法的每次迭代中,我们尝试在网络中增加流量,直到找到一条增广路径或确认网络已经饱和,无法增加更多的流量。
### 3.1.2 算法的迭代过程
Ford-Fulkerson算法是一个迭代过程,每一步迭代中都会尝试增加网络中的流量。以下是算法的详细步骤:
1. 初始化网络流量为零。
2. 持续执行以下步骤,直到网络无法进行进一步的流量增加:
- 在当前流量条件下,寻找一条增广路径。
- 如果找到了增广路径,沿着这条路径增加流量。
- 更新网络中的残余容量。
3. 当无法再找到增广路径时,算法结束,当前的流量就是网络的最大流量。
## 3.2 算法的复杂度分析
### 3.2.1 时间复杂度的影响因素
Ford-Fulkerson算法的时间复杂度主要取决于增广路径的寻找过程。如果使用深度优先搜索(DFS),算法的时间复杂度可以达到O(EF),其中E是网络中的边数,F是网络的最大流量。这主要是因为每次找到一条增广路径后,流量可能只增加一个非常小的量,这意味着算法需要执行很多次迭代才能达到最大流量。
如果使用广度优先搜索(BFS)来寻找增广路径,时间复杂度可以优化到O(VE^2),其中V是网络中的顶点数。这是因为在每次迭代中,BFS可以在O(E)时间内找到一条最短的增广路径(即边数最少的路径),而总的迭代次数则受限于每条边的容量乘以边的数量。
### 3.2.2 最坏情况分析
在最坏的情况下,Ford-Fulkerson算法的性能会受到限制。比如在每次迭代中只增加极小的流量,算法需要进行大量的迭代才能确定网络的最大流。例如,在一个简单的网络中,如果每个增广路径只增加单位流量,那么算法的迭代次数将是O(EF)。在最坏的情况下,即网络的容量非常小,这个复杂度是不可接受的。
## 3.3 算法优化策略
### 3.3.1 Edmonds-Karp算法的改进
Edmonds-Karp算法是Ford-Fulkerson方法的一个改进版本,它使用广度优先搜索(BFS)来寻找增广路径。Edmonds-Karp算法克服了Ford-Fulkerson算法在最坏情况下时间复杂度较高的问题。通过利用BFS来寻找最短的增广路径(即边数最少的路径),它保证了算法的每一步迭代都尽可能地增加流量,从而减少迭代的次数。
以下是Edmonds-Karp算法的伪代码:
```pseudo
function EdmondsKarp(graph, source, sink):
for each edge in graph.edges:
edge.flow = 0
while there is a path from source to sink in graph.residual:
path = BFS(graph.residual, source, sink)
bottleneck = min(edge.capacity - edge.flow for edge in path)
for edge in path:
edge.flow += bottleneck
edge.reverse.flow -= bottleneck
return sum(edge.flow for edge in graph.edges starting from source)
```
### 3.3.2 Dinic算法和Push-relabel算法简介
除了Edmonds-Karp算法之外,还有一些其他的优化策略。比如Dinic算法和Push-relabel算法:
- **Dinic算法**:该算法进一步优化了寻找增广路径的过程,它在每次迭代中使用BFS构造一个层次图,然后在这个层次图中寻找增广路径。Dinic算法的时间复杂度为O(V^2E)。
- **Push-relabel算法**:这种算法使用了不同的方法来实现最大流的计算,它不依赖于增广路径的概念,而是通过"推"和"标签"操作来增加流量。它的工作机制是局部的,可以避免全局搜索增广路径的过程。Push-relabel算法的时间复杂度为O(V^2√E)。
通过这些改进,算法能够以更加高效的

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 Java 中邻接图的数据结构,涵盖了其在各种应用场景中的性能优化、遍历策略、最短路径算法、网络流算法、动态变化处理、强连通分量分析、社交网络分析、可视化、复杂网络分析、并行计算、稀疏图压缩、路径查找优化、数据结构升级和循环检测等方面。通过深入浅出的讲解和丰富的代码示例,本专栏旨在帮助读者掌握邻接图的原理、实现和应用,从而提升 Java 图数据结构处理能力。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【16位加法器设计秘籍】:全面揭秘高性能计算单元的构建与优化

# 摘要
本文对16位加法器进行了全面的研究和分析。首先回顾了加法器的基础知识,然后深入探讨了16位加法器的设计原理,包括二进制加法基础、组成部分及其高性能设计考量。接着,文章详细阐述
三菱FX3U PLC编程:从入门到高级应用的17个关键技巧

# 摘要
三菱FX3U PLC是工业自动化领域常用的控制器之一,本文全面介绍了其编程技巧和实践应用。文章首先概述了FX3U PLC的基本概念、功能和硬件结构,随后深入探讨了
【Xilinx 7系列FPGA深入剖析】:掌握架构精髓与应用秘诀
# 摘要
本文详细介绍了Xilinx 7系列FPGA的关键特性及其在工业应用中的广泛应用。首先概述了7系列FPGA的基本架构,包括其核心的可编程逻辑单元(PL)、集成的块存储器(BRAM)和数字信号处理(DSP)单元。接着,本文探讨了使用Xilinx工具链进行FPGA编程与配置的流程,强调了设计优化和设备配置的重要性。文章进一步分析了7系列FPGA在
【图像技术的深度解析】:Canvas转JPEG透明度保护的终极策略

# 摘要
随着Web技术的不断发展,图像技术在前端开发中扮演着越来越重要的角色。本文首先介绍了图像技术的基础和Canvas绘
【MVC标准化:肌电信号处理的终极指南】:提升数据质量的10大关键步骤与工具
# 摘要
MVC标准化是肌电信号处理中确保数据质量的重要步骤,它对于提高测量结果的准确性和可重复性至关重要。本文首先介绍肌电信号的生理学原理和MVC标准化理论,阐述了数据质量的重要性及影响因素。随后,文章深入探讨了肌电信号预处理的各个环节,包括噪声识别与消除、信号放大与滤波技术、以及基线漂移的校正方法。在提升数据质量的关键步骤部分,本文详细描述了信号特征提取、MVC标准化的实施与评估,并讨论了数据质量评估与优化工具。最后,本文通过实验设计和案例分析,展示了MVC标准化在实践应用中的具
ISA88.01批量控制:电子制造流程优化的5大策略

# 摘要
本文首先概述了ISA88.01批量控制标准,接着深入探讨了电子制造流程的理论基础,包括原材料处理、制造单元和工作站的组成部分,以及流程控制的理论框架和优化的核心原则。进一步地,本文实
【Flutter验证码动画效果】:如何设计提升用户体验的交互
# 摘要
随着移动应用的普及和安全需求的提升,验证码动画作为提高用户体验和安全性的关键技术,正受到越来越多的关注。本文首先介绍Flutter框架下验证码动画的重要性和基本实现原理,涵盖了动画的类型、应用场景、设计原则以及开发工具和库。接着,文章通过实践篇深入探讨了在Flutter环境下如何具体实现验证码动画,包括基础动画的制作、进阶技巧和自定义组件的开发。优化篇
ENVI波谱分类算法:从理论到实践的完整指南
# 摘要
ENVI软件作为遥感数据处理的主流工具之一,提供了多种波谱分类算法用于遥感图像分析。本文首先概述了波谱分类的基本概念及其在遥感领域的重要性,然后介绍了ENVI软件界面和波谱数据预处理的流程。接着,详细探讨了ENVI软件中波谱分类算法的实现方法,通过实践案例演示了像元级和对象级波谱分类算法的操作。最后,文章针对波谱分类的高级应用、挑战及未来发展进行了讨论,重点分析了高光谱数据分类和深度学习在波谱分类中的应用情况,以及波谱分类在土地覆盖制图和农业监测中的实际应用。
# 关键字
ENVI软件;波谱分类;遥感图像;数据预处理;分类算法;高光谱数据
参考资源链接:[使用ENVI进行高光谱分
【天线性能提升密籍】:深入探究均匀线阵方向图设计原则及案例分析
# 摘要
本文深入探讨了均匀线阵天线的基础理论及其方向图设计,旨在提升天线系统的性能和应用效能。文章首先介绍了均匀线阵及方向图的基本概念,并阐述了方向图设计的理论基础,包括波束形成与主瓣及副瓣特性的控制。随后,论文通过设计软件工具的应用和实际天线系统调试方法,展示了方向图设计的实践技巧。文中还包含了一系列案例分析,以实证研究验证理论,并探讨了均匀线阵性能
【兼容性问题】快解决:专家教你确保光盘在各设备流畅读取
/i.s3.glbimg.com/v1/AUTH_08fbf48bc0524877943fe86e43087e7a/internal_photos/bs/2021/L/w/I3DfXKTAmrqNi0rGtG5A/2014-06-24-cd-dvd-bluray.png)
# 摘要
光盘作为一种传统的数据存储介质,其兼容性问题长
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )