步进电机控制中的单片机应用:深入分析驱动策略和控制方法
发布时间: 2024-07-15 06:43:42 阅读量: 54 订阅数: 49 

AVRDANPIANJI.rar_单片机程序_步进电机驱动器_步进电机驱动器 单片机 控制
# 1. 步进电机控制基础**
步进电机是一种将电脉冲转换为机械角位移的电机。其工作原理是将定子上的线圈通电,产生磁场,与转子上的永磁体相互作用,从而产生转矩。步进电机具有控制精度高、响应快、定位准确等优点,广泛应用于机器人、工业自动化、医疗设备等领域。
步进电机控制系统主要包括步进电机、驱动器和控制器。驱动器负责将控制器的脉冲信号转换为驱动步进电机的电流,而控制器负责生成脉冲信号并对电机进行控制。
# 2. 单片机驱动策略
### 2.1 脉冲宽度调制(PWM)驱动
#### 2.1.1 PWM原理和实现
脉冲宽度调制(PWM)是一种通过改变脉冲宽度来控制输出功率的调制技术。在步进电机驱动中,PWM用于控制电机绕组中的电流,从而实现电机转速和方向的控制。
PWM信号由一个周期性方波组成,方波的占空比(脉冲宽度与周期之比)决定了输出功率的大小。当占空比增大时,输出功率也随之增大。
在单片机中,PWM信号可以通过定时器模块生成。定时器模块可以配置为产生固定频率的方波,并通过比较器将方波与一个可变的参考电压进行比较。当方波大于参考电压时,输出为高电平;当方波小于参考电压时,输出为低电平。
```c
// STM32F103C8T6单片机PWM配置示例
#include "stm32f10x.h"
void PWM_Config(void)
{
// 使能定时器2时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
// 设置定时器2为PWM模式
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Period = 1000; // PWM频率为1kHz
TIM_TimeBaseStructure.TIM_Prescaler = 72; // 分频系数为72
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
// 设置定时器2的比较值
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 500; // 占空比为50%
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM2, &TIM_OCInitStructure);
// 使能定时器2
TIM_Cmd(TIM2, ENABLE);
}
```
#### 2.1.2 PWM参数优化
PWM驱动中,需要对PWM参数进行优化,以提高电机性能。主要优化参数包括:
- **PWM频率:**PWM频率过低会导致电机转速不稳定,过高会导致电机过热。一般选择在1kHz~10kHz范围内。
- **占空比:**占空比决定了电机绕组中的电流大小,从而影响电机转速和扭矩。
- **死区时间:**死区时间是指在PWM信号切换时,两个输出端都为低电平的时间段。死区时间过短会导致电机绕组短路,过长会导致电机转速降低。
### 2.2 方向控制
#### 2.2.1 逻辑电平控制
逻辑电平控制是最简单的方向控制方式,通过改变单片机输出的逻辑电平来控制电机方向。
例如,对于一个双极步进电机,可以通过以下方式控制方向:
- 当单片机输出高电平时,电机正转。
- 当单片机输出低电平时,电机反转。
#### 2.2.2 H桥驱动电路
H桥驱动电路是一种功率电子电路,可以控制直流电机的方向和转速。H桥驱动电路由四个开关组成,通过控制开关的通断状态来控制电机绕组的电流方向。
在步进电机驱动中,H桥驱动电路可以实现电机正转、反转和制动等功能。
```c
// STM32F103C8T6单片机H桥驱动电路控制示例
#include "stm32f10x.h"
void HBridge_Control(uint8_t direction)
{
// 根据方向设置H桥驱动电路的开关状态
if (direction == FORWARD)
{
GPIO_SetBits(GPIOA, GPIO_Pin_0); // IN1置1
GPIO_ResetBits(GPIOA, GPIO_Pin_1); // IN2置0
GPIO_ResetBits(GPIOA, GPIO_Pin_2); // IN3置0
GPIO_SetBits(GPIOA, GPIO_Pin_3); // IN4置1
}
else if (direction == REVERSE)
{
GPIO_ResetBits(GPIOA, GPIO_Pin_0); // IN1置0
GPIO_SetBits(GPIOA, GPIO_Pin_1); // IN2置1
GPIO_SetBits(GPIOA, GPIO_Pin_2); // IN3置1
GPIO_ResetBits(GPIOA, GPIO_Pin_3); // IN4置0
}
else if (direction == BRAKE)
{
GPIO_SetBits(GPIOA, GPIO_Pin_0); // IN1置1
GPIO_SetBits(GPIOA, GPIO_Pin_1); // IN2置1
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了单片机在步进电机控制中的应用,从原理到实践,全面解析了驱动策略、控制方法和故障排除技巧。通过十个章节,专栏循序渐进地介绍了步进电机控制的基本原理、驱动技术、算法优化、PID算法应用、实时控制、高精度定位技术、闭环控制、嵌入式系统设计、传感器融合以及在工业自动化、智能制造、新能源汽车和电动机等领域的应用。本专栏旨在为读者提供全面的知识和实践指南,帮助他们掌握单片机步进电机控制的精髓,并将其应用于各种实际项目中。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【PID控制技术问答集】:解决常见问题,保障系统稳定运行
# 摘要
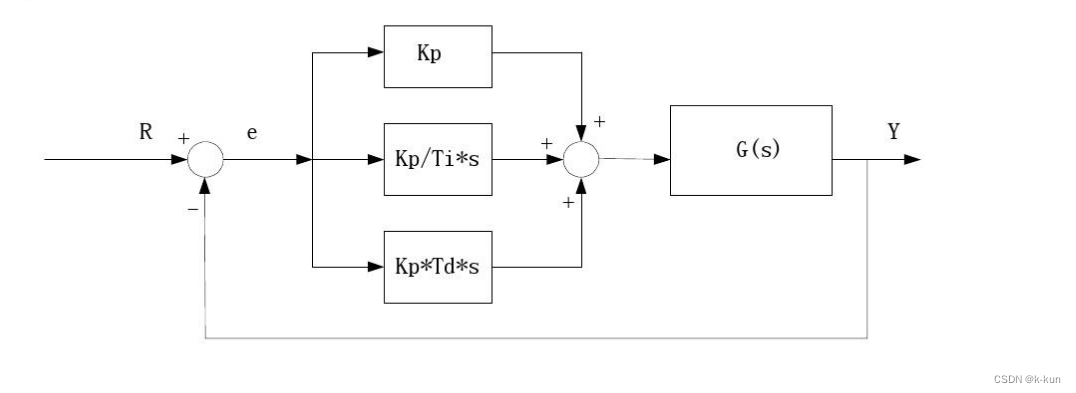
PID控制技术作为自动化控制领域的一项基础技术,广泛应用于工业过程控制、运动控制和能源管理等多个行业。本文首先介绍了PID控制技术的基本概念和理论基础,详细阐述了比例(P)、积分(I)、微分(D)三个组成部分的作用,并探讨了PID参数调整的多种方法及其对系统稳定性的影响。随后,文章转向PID控制技术的实践技巧,包括控制器实现、系统调试和优化技巧,并通过案例分析展示了优化前后的效果对比。在高级应用章节,本文探讨了PID控制算法的变种
【CDEGS软件深度应用】:电缆布局优化与电磁场模拟基础
# 摘要
CDEGS软件是一款先进的电磁场计算工具,广泛应用于电缆布局的设计与优化。本文首先对CDEGS软件进行简介,概述其功能。随后,深入探讨了电磁场理论基础及其在电缆布局中的应用,重点分析了电缆布局对电磁场的影响,包括互感互容效应和电磁干扰(EMI)。本文还详细介绍了CDEGS软件的操作流程、模拟基础以及高级功能,并探讨了如何使用该软件进行电缆布局优化。最后,展望了CDEGS软件在电磁场模拟应用中的未来方向,包括与新兴技术结合的潜力、
【故障排查专家课】:SPC-4环境问题解决案例分析
# 摘要
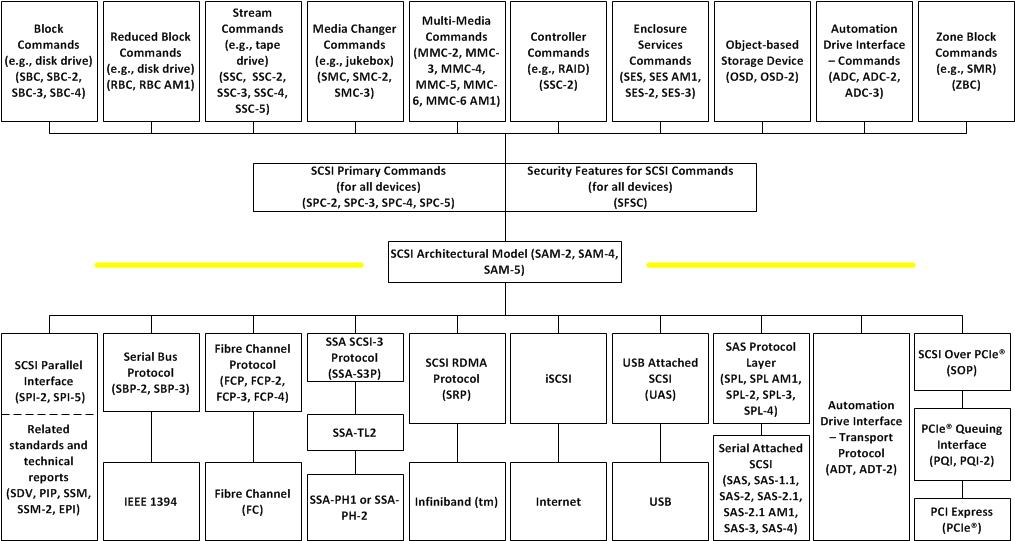
本文介绍了SPC-4环境与故障排查的基本知识,系统阐述了SPC-4的工作原理、故障排查的理论方法,并深入探讨了故障诊断的实践技巧。文章通过具体案例分析,展示了日志分析、性能监控在故障诊断中的应用,并介绍了故障解决方案的实施策略,包括软件更新、硬件替换和预防措施。此外,本文还提供了SPC-4环境优化与调优的策略,以及高级故障排查技巧,旨在提高故障处理的效率和系统的可靠性。通过系统化和实战化的分析,本文帮助技术人员更全面地理解和应对SPC-4
西门子V20变频器性能提升:4个实用技巧助你实现工业效率飞跃

# 摘要
西门子V20变频器作为工业自动化领域的重要设备,其性能优化和应用效率直接关系到整个生产线的稳定运行。本文首先对西门子V20变频器的基本概念及工作原理进行了概述,接着分析了影响其性能的关键因素,包括硬件升级、固件与软件的协同优化。文章还探讨了提升变频器性能的实用技巧,例如电机控制与调节、运行模式的调整以及预防性维护。通过工业应用案例分析,本文展示
GC0328数据手册指南:如何安全有效地构建和优化FAE系统
# 摘要
FAE系统作为一种复杂的技术框架,对确保高性能、高可靠性与安全性具有至关重要的作用。本文从概念出发,深入探讨了FAE系统的基础架构和设计原则,分析了其核心组件与工作流程,并强调了可靠性、安全性和可扩展性的重要性。随后,本文详细介绍了FAE系统的构建过程、功能模块的实现以及优化方法,包括性能和安全的提升策略。通过案例分析,本文展示了FAE系统在生产环境中的实际应用效果以及优化前后的对比
Delphi编程秘籍:7个实用技巧提升延时操作效率
# 摘要
本文全面探讨了Delphi编程中与时间控制相关的核心概念和技术,包括线程管理、异步编程模式、定时器应用、延时执行与等待机制,以及延迟函数和性能优化。文章详细介绍了如何在Delphi环境下实现有效的线程控制和同步、高效使用定时器以及多种延时操作,同时探讨了不同延迟函数的特性及其在性能优化中的应用。通过对这些高级编程技巧的深入分析和实际案例的展示,本文旨在帮助开发者更好地掌握Delphi中的时间控制技术,提升开发效率和应
【文献检索自动化】:EndNote X7搜索代理构建技巧大揭秘

# 摘要
随着科研工作的复杂性和数据量的激增,文献检索自动化成为提升研究效率的关键。本文对EndNote X7软件的使用进行了全面介绍,从基础操作到个性化设置,再到构建高效的搜索代理。此外,本文深入探讨了文献检索自动化在科研中的应用,重点分析了自动化检索的科研价值以及如何针对特定需求定制搜索代理。最后,本文展望了自动化检索技术的发展趋势,讨论了面临的挑战并提出了应对策略,为科研人员提供了有效利用
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )