揭秘单片机控制步进电机:3大驱动原理和5个应用技巧
发布时间: 2024-07-15 06:36:47 阅读量: 101 订阅数: 24 

单片机控制步进电机驱动器工作原理
# 1. 单片机控制步进电机的基础
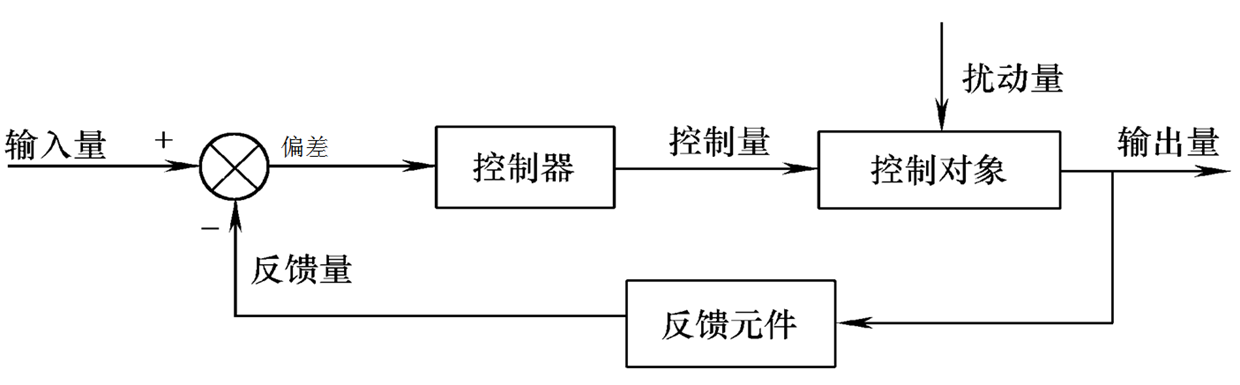
步进电机是一种将电脉冲信号转换成角位移或线位移的执行器,在工业自动化、医疗器械、机器人等领域有着广泛的应用。单片机控制步进电机是一种常见的控制方式,具有成本低、体积小、控制灵活的特点。
本节将介绍单片机控制步进电机的基础知识,包括步进电机的类型、工作原理、驱动方式以及与单片机的接口方式。通过对这些基础知识的理解,可以为后续的步进电机控制实践奠定基础。
# 2. 步进电机驱动原理
### 2.1 波形驱动
波形驱动是步进电机最基本的驱动方式,通过向电机绕组施加不同波形的电压,控制电机的转动。
#### 2.1.1 全步驱动
全步驱动是最简单的波形驱动方式,它向电机绕组施加方波电压,每次改变一个绕组的极性。这种驱动方式使电机以全步(360°/步数)转动。
**代码块:**
```python
def full_step_drive(motor, steps):
"""全步驱动步进电机
Args:
motor: 步进电机对象
steps: 要转动的步数
"""
for i in range(steps):
# 依次改变绕组极性
motor.set_phase(1, 1)
motor.set_phase(2, -1)
motor.set_phase(3, 1)
motor.set_phase(4, -1)
```
**逻辑分析:**
这段代码实现了全步驱动算法。它依次将四个绕组的极性设置为 1 和 -1,从而使电机以全步转动。
#### 2.1.2 半步驱动
半步驱动是一种比全步驱动更平滑的驱动方式,它通过向电机绕组施加交替的方波电压,每次改变两个绕组的极性。这种驱动方式使电机以半步(180°/步数)转动。
**代码块:**
```python
def half_step_drive(motor, steps):
"""半步驱动步进电机
Args:
motor: 步进电机对象
steps: 要转动的步数
"""
for i in range(steps):
# 依次改变绕组极性
motor.set_phase(1, 1)
motor.set_phase(2, 0)
motor.set_phase(3, -1)
motor.set_phase(4, 0)
motor.set_phase(1, 0)
motor.set_phase(2, 1)
motor.set_phase(3, 0)
motor.set_phase(4, -1)
```
**逻辑分析:**
这段代码实现了半步驱动算法。它依次将四个绕组的极性设置为 1、0、-1 和 0,从而使电机以半步转动。
### 2.2 电流驱动
电流驱动是另一种步进电机驱动方式,它通过控制流过电机绕组的电流,控制电机的转动。
#### 2.2.1 常规电流驱动
常规电流驱动是最简单的电流驱动方式,它向电机绕组施加恒定的电流。这种驱动方式使电机以恒定的速度转动,但效率较低。
**代码块:**
```python
def constant_current_drive(motor, current):
"""常规电流驱动步进电机
Args:
motor: 步进电机对象
current: 要施加的电流
"""
motor.set_current(current)
```
**逻辑分析:**
这段代码实现了常规电流驱动算法。它将恒定的电流施加到电机绕组上,从而使电机以恒定的速度转动。
#### 2.2.2 细分驱动
细分驱动是一种比常规电流驱动更平滑的驱动方式,它通过控制流过电机绕组的电流波形,控制电机的转动。这种驱动方式使电机以更小的步长转动,从而提高了平滑度。
**代码块:**
```python
def microstepping_drive(motor, steps, microsteps):
"""细分驱动步进电机
Args:
motor: 步进电机对象
steps: 要转动的步数
microsteps: 细分步数
"""
for i in range(steps * microsteps):
# 计算细分步的电流波形
current = calculate_microstep_current(i, microsteps)
motor.set_current(current)
```
**逻辑分析:**
这段代码实现了细分驱动算法。它计算细分步的电流波形,然后将该电流施加到电机绕组上,从而使电机以更小的步长转动。
### 2.3 混合驱动
混合驱动是波形驱动和电流驱动的组合,它结合了这两种驱动方式的优点。
#### 2.3.1 混合电流驱动
混合电流驱动是一种混合驱动方式,它在波形驱动中加入了电流控制。这种驱动方式提高了电机的效率和转动平滑度。
**代码块:**
```python
def mixed_current_drive(motor, steps, current):
"""混合电流驱动步进电机
Args:
motor: 步进电机对象
steps: 要转动的步数
current: 要施加的电流
"""
for i in range(steps):
# 计算混合电流波形
current = calculate_mixed_current(i, current)
motor.set_current(current)
```
**逻辑分析:**
这段代码实现了混合电流驱动算法。它计算混合电流波形,然后将该电流施加到电机绕组上,从而提高了电机的效率和转动平滑度。
#### 2.3.2 混合微步驱动
混合微步驱动是一种混合驱动方式,它在波形驱动中加入了细分电流控制。这种驱动方式进一步提高了电机的转动平滑度。
**代码块:**
```python
def mixed_microstepping_drive(motor, steps, microsteps, current):
"""混合微步驱动步进电机
Args:
motor: 步进电机对象
steps: 要转动的步数
microsteps: 细分步数
current: 要施加的电流
"""
for i in range(steps * microsteps):
# 计算混合微步电流波形
current = calculate_mixed_microstep_current(i, microsteps, current)
motor.set_current(current)
```
**逻辑分析:**
这段代码实现了混合微步驱动算法。它计算混合微步电流波形,然后将该电流施加到电机绕组上,从而进一步提高了电机的转动平滑度。
# 3. 单片机控制步进电机实践
### 3.1 硬件连接与配置
#### 3.1.1 电路连接
单片机控制步进电机的硬件连接主要包括以下几个部分:
- 单片机:负责控制步进电机的运动。
- 步进电机驱动器:负责放大单片机的控制信号,驱动步进电机运动。
- 步进电机:执行单片机指令,产生旋转运动。
- 电源:为单片机、驱动器和步进电机供电。
电路连接时需要注意以下几点:
- 单片机与驱动器的连接:一般通过数字I/O接口连接,单片机输出控制信号,驱动器接收并放大信号。
- 驱动器与步进电机的连接:根据步进电机的类型和驱动方式选择连接方式,常见的有并联连接、串联连接和混合连接。
- 电源连接:选择合适的电源电压和电流,确保单片机、驱动器和步进电机正常工作。
#### 3.1.2 单片机配置
单片机配置主要包括以下几个方面:
- I/O口配置:设置单片机用于控制步进电机的I/O口为输出模式。
- 定时器配置:使用单片机的定时器产生控制步进电机运动的脉冲信号。
- 中断配置:配置单片机的中断,以便在步进电机运动过程中及时响应事件。
### 3.2 控制算法实现
#### 3.2.1 步进电机控制算法
单片机控制步进电机需要实现以下算法:
- **脉冲生成算法:**根据步进电机的步距角和目标转速,计算并生成控制步进电机运动的脉冲信号。
- **方向控制算法:**控制步进电机的旋转方向,正向或反向。
- **加速/减速算法:**控制步进电机的加速和减速过程,平滑电机运动。
#### 3.2.2 速度和位置控制
单片机控制步进电机可以实现速度和位置控制:
- **速度控制:**通过调节脉冲频率控制步进电机的转速,可以实现恒速、变速等控制方式。
- **位置控制:**通过记录步进电机转动的脉冲数,可以计算出电机的位置,实现精确定位控制。
### 3.3 调试与优化
#### 3.3.1 常见问题排查
单片机控制步进电机过程中可能会遇到以下常见问题:
- **步进电机不转动:**检查电路连接、单片机配置、脉冲信号是否正常。
- **步进电机抖动:**调整驱动器参数,优化脉冲信号的上升沿和下降沿时间。
- **步进电机失步:**增加驱动电流,降低电机转速,优化加速/减速算法。
#### 3.3.2 性能优化策略
为了优化单片机控制步进电机的性能,可以采取以下策略:
- **选择合适的驱动方式:**根据步进电机的类型和应用场景选择合适的驱动方式,如全步驱动、半步驱动或细分驱动。
- **优化脉冲信号:**调整脉冲信号的频率、占空比和相位,提高电机运行的平滑性和精度。
- **使用闭环控制:**通过编码器或光电开关反馈步进电机的实际位置,实现闭环控制,提高定位精度和抗干扰能力。
# 4. 单片机控制步进电机应用技巧
### 4.1 速度控制技术
步进电机的速度控制至关重要,影响着系统的性能和精度。本章节介绍两种常用的速度控制技术:PID控制和自适应控制。
#### 4.1.1 PID控制
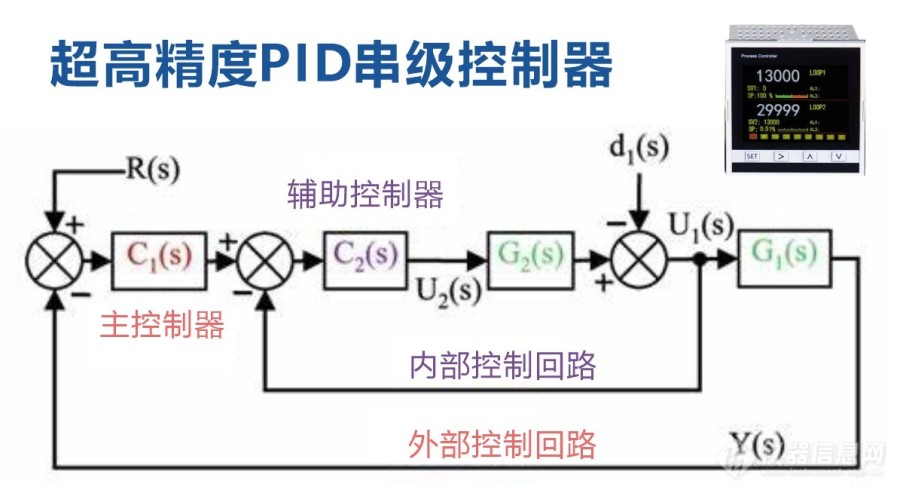
PID控制(比例-积分-微分控制)是一种经典的反馈控制算法,广泛应用于步进电机速度控制。PID控制器通过测量电机实际速度与期望速度之间的误差,并根据误差的比例、积分和微分值来调整控制信号,从而实现速度的稳定和准确控制。
```python
# PID控制算法
def pid_control(error, dt):
"""
PID控制算法
Args:
error (float): 速度误差
dt (float): 采样时间
Returns:
float: 控制信号
"""
Kp = 1.0 # 比例增益
Ki = 0.1 # 积分增益
Kd = 0.01 # 微分增益
integral = integral + error * dt
derivative = (error - previous_error) / dt
control_signal = Kp * error + Ki * integral + Kd * derivative
previous_error = error
return control_signal
```
**参数说明:**
* `error`: 速度误差,即期望速度与实际速度之差
* `dt`: 采样时间
* `Kp`: 比例增益,决定控制信号与误差成正比的大小
* `Ki`: 积分增益,决定控制信号与误差积分成正比的大小
* `Kd`: 微分增益,决定控制信号与误差微分成正比的大小
**代码逻辑分析:**
1. 初始化积分变量 `integral` 和上一次误差变量 `previous_error`。
2. 计算积分项、微分项和控制信号。
3. 更新 `previous_error` 变量。
4. 返回控制信号。
#### 4.1.2 自适应控制
自适应控制是一种高级控制技术,可以根据系统参数和环境变化自动调整控制参数。对于步进电机速度控制,自适应控制可以提高系统的鲁棒性和抗干扰能力。
```python
# 自适应控制算法
def adaptive_control(error, dt):
"""
自适应控制算法
Args:
error (float): 速度误差
dt (float): 采样时间
Returns:
float: 控制信号
"""
Kp = 1.0 # 初始比例增益
Ki = 0.1 # 初始积分增益
Kd = 0.01 # 初始微分增益
# 自适应增益调整
Kp += 0.01 * error * dt
Ki += 0.001 * error * dt
Kd += 0.0001 * error * dt
# PID控制
control_signal = Kp * error + Ki * integral + Kd * derivative
return control_signal
```
**参数说明:**
* `error`: 速度误差,即期望速度与实际速度之差
* `dt`: 采样时间
* `Kp`: 比例增益
* `Ki`: 积分增益
* `Kd`: 微分增益
**代码逻辑分析:**
1. 初始化比例增益、积分增益和微分增益。
2. 根据误差和采样时间自适应调整增益。
3. 使用调整后的增益进行 PID 控制。
4. 返回控制信号。
# 5. 单片机控制步进电机应用案例
单片机控制步进电机在工业自动化、医疗设备、机器人等领域有着广泛的应用。以下列举几个典型的应用案例:
### 5.1 数控机床
在数控机床中,步进电机被用于控制刀具的移动和定位。通过单片机控制步进电机,可以实现刀具的精确移动和复杂的轨迹控制。
```c++
// 定义步进电机引脚
const int STEP_PIN = 2;
const int DIR_PIN = 3;
// 设置步进电机步数
const int STEPS_PER_REVOLUTION = 200;
// 设置步进电机速度
const int SPEED = 100;
void setup() {
// 设置步进电机引脚为输出模式
pinMode(STEP_PIN, OUTPUT);
pinMode(DIR_PIN, OUTPUT);
}
void loop() {
// 设置步进电机方向
digitalWrite(DIR_PIN, HIGH);
// 循环移动步进电机
for (int i = 0; i < STEPS_PER_REVOLUTION; i++) {
// 发送步进脉冲
digitalWrite(STEP_PIN, HIGH);
delayMicroseconds(SPEED);
digitalWrite(STEP_PIN, LOW);
delayMicroseconds(SPEED);
}
}
```
### 5.2 3D打印机
在3D打印机中,步进电机被用于控制打印头的移动和挤出材料。通过单片机控制步进电机,可以实现打印头的精确移动和复杂模型的打印。
```python
import RPi.GPIO as GPIO
# 定义步进电机引脚
STEP_PIN = 17
DIR_PIN = 27
ENABLE_PIN = 22
# 设置步进电机步数
STEPS_PER_MM = 100
# 设置步进电机速度
SPEED = 100
# 初始化GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setup(STEP_PIN, GPIO.OUT)
GPIO.setup(DIR_PIN, GPIO.OUT)
GPIO.setup(ENABLE_PIN, GPIO.OUT)
# 设置步进电机方向
GPIO.output(DIR_PIN, GPIO.HIGH)
# 循环移动步进电机
for i in range(100):
# 发送步进脉冲
GPIO.output(STEP_PIN, GPIO.HIGH)
time.sleep(SPEED / 1000)
GPIO.output(STEP_PIN, GPIO.LOW)
time.sleep(SPEED / 1000)
```
### 5.3 机器人控制
在机器人控制中,步进电机被用于控制机器人的关节运动和移动。通过单片机控制步进电机,可以实现机器人的灵活运动和复杂的动作控制。
```java
import com.pi4j.io.gpio.GpioController;
import com.pi4j.io.gpio.GpioFactory;
import com.pi4j.io.gpio.GpioPinDigitalOutput;
import com.pi4j.io.gpio.PinState;
// 定义步进电机引脚
final GpioController gpio = GpioFactory.getInstance();
final GpioPinDigitalOutput stepPin = gpio.provisionDigitalOutputPin(RaspiPin.GPIO_02, "StepPin", PinState.LOW);
final GpioPinDigitalOutput dirPin = gpio.provisionDigitalOutputPin(RaspiPin.GPIO_03, "DirPin", PinState.LOW);
// 设置步进电机步数
final int STEPS_PER_REVOLUTION = 200;
// 设置步进电机速度
final int SPEED = 100;
public static void main(String[] args) {
// 设置步进电机方向
dirPin.setState(PinState.HIGH);
// 循环移动步进电机
for (int i = 0; i < STEPS_PER_REVOLUTION; i++) {
// 发送步进脉冲
stepPin.setState(PinState.HIGH);
try {
Thread.sleep(SPEED);
} catch (InterruptedException e) {
e.printStackTrace();
}
stepPin.setState(PinState.LOW);
try {
Thread.sleep(SPEED);
} catch (InterruptedException e) {
e.printStackTrace();
}
}
}
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了单片机在步进电机控制中的应用,从原理到实践,全面解析了驱动策略、控制方法和故障排除技巧。通过十个章节,专栏循序渐进地介绍了步进电机控制的基本原理、驱动技术、算法优化、PID算法应用、实时控制、高精度定位技术、闭环控制、嵌入式系统设计、传感器融合以及在工业自动化、智能制造、新能源汽车和电动机等领域的应用。本专栏旨在为读者提供全面的知识和实践指南,帮助他们掌握单片机步进电机控制的精髓,并将其应用于各种实际项目中。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
ODU flex故障排查:G.7044标准下的终极诊断技巧

# 摘要
本文综述了ODU flex技术在故障排查方面的应用,重点介绍了G.7044标准的基础知识及其在ODU flex故障检测中的重要性。通过对G.7044协议理论基础的探讨,本论文阐述了该协议在故障诊断中的核心作用。同时,本文还探讨了故障检测的基本方法和高级技术,并结合实践案例分析,展示了如何综合应用各种故障检测技术解决实际问题。最后,本论文展望了故障排查技术的未来发展,强调了终
环形菜单案例分析

# 摘要
环形菜单作为用户界面设计的一种创新形式,提供了不同于传统线性菜单的交互体验。本文从理论基础出发,详细介绍了环形菜单的类型、特性和交互逻辑。在实现技术章节,文章探讨了基于Web技术、原生移动应用以及跨平台框架的不同实现方法。设计实践章节则聚焦于设计流程、工具选择和案例分析,以及设计优化对用户体验的影响。测试与评估章节覆盖了测试方法、性能安全评估和用户反馈的分析。最后,本文展望
【性能优化关键】:掌握PID参数调整技巧,控制系统性能飞跃
# 摘要
本文深入探讨了PID控制理论及其在工业控制系统中的应用。首先,本文回顾了PID控制的基础理论,阐明了比例(P)、积分(I)和微分(D)三个参数的作用及重要性。接着,详细分析了PID参数调整的方法,包括传统经验和计算机辅助优化算法,并探讨了自适应PID控制策略。针对PID控制系统的性能分析,本文讨论了系统稳定性、响应性能及鲁棒性,并提出相应的提升策略。在
系统稳定性提升秘籍:中控BS架构考勤系统负载均衡策略

# 摘要
本文旨在探讨中控BS架构考勤系统中负载均衡的应用与实践。首先,介绍了负载均衡的理论基础,包括定义、分类、技术以及算法原理,强调其在系统稳定性中的重要性。接着,深入分析了负载均衡策略的选取、实施与优化,并提供了基于Nginx和HAProxy的实际
【Delphi实践攻略】:百分比进度条数据绑定与同步的终极指南

# 摘要
本文针对百分比进度条的设计原理及其在Delphi环境中的数据绑定技术进行了深入研究。首先介绍了百分比进度条的基本设计原理和应用,接着详细探讨了Delphi中数据绑定的概念、实现方法及高级应用。文章还分析了进度条同步机制的理论基础,讨论了实现进度条与数据源同步的方法以及同步更新的优化策略。此外,本文提供了关于百分比进度条样式自定义与功能扩展的指导,并
【TongWeb7集群部署实战】:打造高可用性解决方案的五大关键步骤

# 摘要
本文深入探讨了高可用性解决方案的实施细节,首先对环境准备与配置进行了详细描述,涵盖硬件与网络配置、软件安装和集群节点配置。接着,重点介绍了TongWeb7集群核心组件的部署,包括集群服务配置、高可用性机制及监控与报警设置。在实际部署实践部分,本文提供了应用程序部署与测试、灾难恢复演练及持续集成与自动化部署
JY01A直流无刷IC全攻略:深入理解与高效应用

# 摘要
本文详细介绍了JY01A直流无刷IC的设计、功能和应用。文章首先概述了直流无刷电机的工作原理及其关键参数,随后探讨了JY01A IC的功能特点以及与电机集成的应用。在实践操作方面,本文讲解了JY01A IC的硬件连接、编程控制,并通过具体
先锋SC-LX59:多房间音频同步设置与优化

# 摘要
本文旨在介绍先锋SC-LX59音频系统的特点、多房间音频同步的理论基础及其在实际应用中的设置和优化。首先,文章概述了音频同步技术的重要性及工作原理,并分析了影响音频同步的网络、格式和设备性能因素。随后,针对先锋SC-LX59音频系统,详细介绍了初始配置、同步调整步骤和高级同步选项。文章进一步探讨了音频系统性能监测和质量提升策略,包括音频格式优化和环境噪音处理。最后,通过案例分析和实战演练,展示了同步技术在多品牌兼容性和创新应用
【S参数实用手册】:理论到实践的完整转换指南
# 摘要
本文系统阐述了S参数的基础理论、测量技术、在射频电路中的应用、计算机辅助设计以及高级应用和未来发展趋势。第一章介绍了S参数的基本概念及其在射频工程中的重要性。第二章详细探讨了S参数测量的原理、实践操作以及数据处理方法。第三章分析了S参数在射频电路、滤波器和放大器设计中的具体应用。第四章进一步探讨了S参数在CAD软件中的集成应用、仿真优化以及数据管理。第五章介绍了
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )