DSP NNC-PID在电液位置伺服控制系统的应用
57 浏览量
更新于2024-08-30
1
收藏 386KB PDF 举报
"本文介绍了在工业电子领域中,如何利用基于DSP的NNC-PID智能控制器设计电液位置伺服控制系统,特别是在汽车制造过程中的应用。该系统解决了电液位置伺服系统因非线性、不确定性、时变性和干扰等问题而带来的控制挑战。通过结合PID控制器的简单高效和神经网络的自适应能力,提高了系统的控制性能和精度。文章详细阐述了系统构成、硬件设计及NNC-PID的工作原理。"
电液位置伺服控制系统在汽车制造过程中起着关键作用,广泛应用于机械手的焊装、喷漆以及机床等设备。这种系统的优势在于其大功率、快速响应和高精度,因此对控制策略有严格要求,需要具备优秀的定位精度和伺服跟踪性能。然而,电液位置伺服系统的复杂性在于其非线性特性、不确定性、时变响应、外部干扰和耦合效应,这些因素使得建立精确的数学模型变得困难。
传统的PID控制器因其结构简单、参数直观且动态静态特性良好而被广泛应用。但是,面对电液位置伺服系统的复杂性,单纯依赖PID可能不足以达到理想的控制效果。相反,人工神经网络(NNC)凭借其信息整合、学习记忆、自适应能力和非线性函数逼近能力,能有效应对难以建模的复杂过程。尽管NNC存在局部最小值的问题,可能影响到最优控制,但将其与PID结合可以克服这些局限,提供更优的控制策略。
在本文中,作者提出了一种基于数字信号处理器(DSP)实现的NNC-PID控制器。DSP TMS320F2812是一款适用于控制应用的高性能芯片,用于构建包括电液位置传感器、A/D和D/A转换器、信号调理电路在内的完整控制系统。通过这样的智能控制器,可以提升电液位置伺服系统的响应速度和控制精度,满足汽车制造工艺的严格需求。
NNC-PID控制器的工作原理是,利用NNC来补偿系统的非线性和不确定性,而PID则负责实时调整,确保系统的稳定性和快速响应。通过DSP的强大计算能力,可以实时更新NNC的权重和PID的参数,以适应系统的变化和干扰。
总结来说,这篇文章除了深入探讨电液位置伺服控制系统的设计挑战和解决方案外,还强调了NNC与PID结合的智能控制策略在工业电子领域的潜力,尤其是在汽车制造过程中的应用。这种创新方法有望提升生产效率和产品质量,同时降低对人工干预的依赖,展示了现代自动化技术在复杂工业环境中的重要价值。
工业电子中的基于工业电子中的基于DSP NNC-PID的电液位置伺服控制系统设计的电液位置伺服控制系统设计
在汽车制造过程中,大量应用电液位置伺服式机械手(焊装、喷漆)、机床(冲、压)以及其他加工装置。电液位置
伺服系统具有功率大、响应快、精度高的特点,这就要求控制系统不仅有良好的定位精度,而且要有好的伺服
跟踪性能,因此是控制领域中的一个重要组成部分。电液位置伺服控制系统的典型特征是非线性、不确定性、
时变性、外界干扰和交叉耦合干扰等,系统精确的数学模型不易建立。因此,对电液系统的控制一直是一个复
杂控制系统问题。 常规PID控制器具有结构简单、参数意义明确、控制的动态和静态特性优良等特点。人
工神经网络(NNC)具有信息综合、学习记忆和自适应能力、逼近任意非线性函数的能力,可以处理那些难以用模
型和规
在汽车制造过程中,大量应用电液位置伺服式机械手(焊装、喷漆)、机床(冲、压)以及其他加工装置。电液位置伺服系统具
有功率大、响应快、精度高的特点,这就要求控制系统不仅有良好的定位精度,而且要有好的伺服跟踪性能,因此是控制领域
中的一个重要组成部分。电液位置伺服控制系统的典型特征是非线性、不确定性、时变性、外界干扰和交叉耦合干扰等,系统
精确的数学模型不易建立。因此,对电液系统的控制一直是一个复杂控制系统问题。
常规PID控制器具有结构简单、参数意义明确、控制的动态和静态特性优良等特点。人工神经网络(NNC)具有信息综合、
学习记忆和自适应能力、逼近任意非线性函数的能力,可以处理那些难以用模型和规则描述的过程,但也存在局部最小点,不
易达到最优控制。
将NNC与PID控制相结合组成智能控制器可以取得更好的控制效果,这里提出采用DSP实现NNC-PID控制器对电液位置
系统进行智能控制,满足电液位置伺服对控制系统响应快和高精度的要求。
1 电液位置伺服系统构成电液位置伺服系统构成
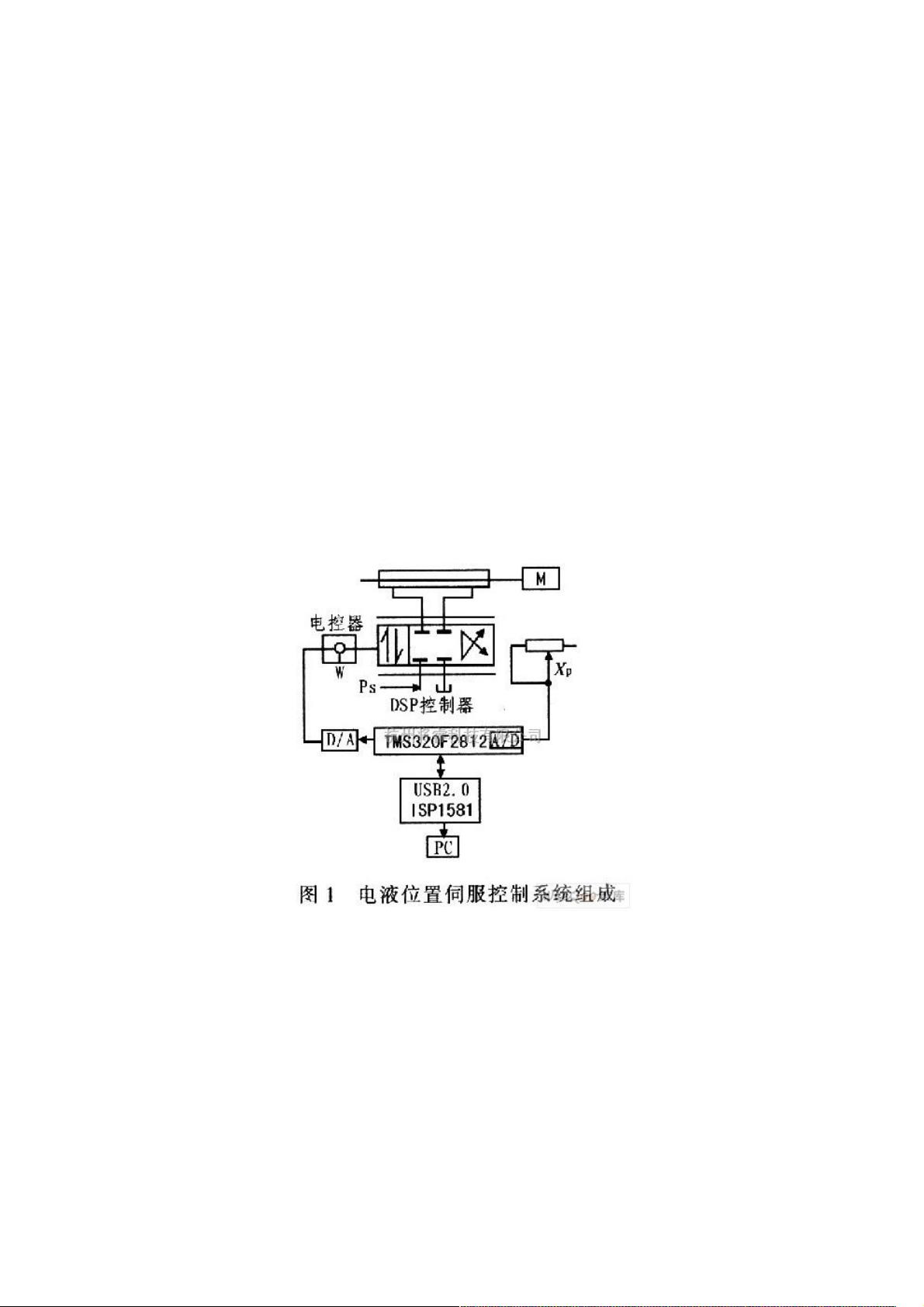
以喷漆机械手第一关节为对象,构造了研究实验装置,如图1所示。其中反馈器件采用精密导电塑料电位计。整个控制系
统以DSP为核心、由喷漆机械手第一关节、位置传感器、12位A/D转换器和D/A转换器、信号调理电路和输出放大驱动电
路以及上位机PC等组成,实现定位和伺服跟踪控制。
2 控制系统硬件设计控制系统硬件设计
TMS320F2812是TI公司推出的2000系列的数字信号处理(DSP),主要应用在控制领域。频率达150 MHz,定点32位的
CPU,可运行16×16和32×32的运算。片上高达128 KB的程序存储器,128 KB的ROM和18 KB的SARAM,外部接口16位数
据线和19位地址线,可外扩l MB的ROM。此外还集成有16通道的12位的A/D转换器,最小化周期80 ns,以及56个可单独编
程的通用I/0(GPIO)引脚。高速的数字信号处理能力及丰富的外扩资源使TMS320F2812适合应用在要求较高的控制系统。
2..1 控制系统总体结构控制系统总体结构
控制系统采用了PC+DSP的控制方案,系统总体结构如图2所示。其中PC机主要用来显示控制界面,调节各控制参数,实
时显示各相关信号。而DSP则完成低层的控制功能,通过A/D转换器采集各路信号,经过一定的算法处理后,由D/A口输
出,以及通过I/0口、光电隔离驱动放大电路来控制各电磁阀的开关。同时通过通信,向PC机发送采集来的信号,并接收PC
机的起动、停止等指令以及各控制参数。
下载后可阅读完整内容,剩余4页未读,立即下载
2021-04-16 上传
2020-10-25 上传
2020-10-26 上传
点击了解资源详情
点击了解资源详情
2020-11-05 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38655998
- 粉丝: 11
- 资源: 890
 我的内容管理
展开
我的内容管理
展开







最新资源
- WordPress作为新闻管理面板的实现指南
- NPC_Generator:使用Ruby打造的游戏角色生成器
- MATLAB实现变邻域搜索算法源码解析
- 探索C++并行编程:使用INTEL TBB的项目实践
- 玫枫跟打器:网页版五笔打字工具,提升macOS打字效率
- 萨尔塔·阿萨尔·希塔斯:SATINDER项目解析
- 掌握变邻域搜索算法:MATLAB代码实践
- saaraansh: 简化法律文档,打破语言障碍的智能应用
- 探索牛角交友盲盒系统:PHP开源交友平台的新选择
- 探索Nullfactory-SSRSExtensions: 强化SQL Server报告服务
- Lotide:一套JavaScript实用工具库的深度解析
- 利用Aurelia 2脚手架搭建新项目的快速指南
- 变邻域搜索算法Matlab实现教程
- 实战指南:构建高效ES+Redis+MySQL架构解决方案
- GitHub Pages入门模板快速启动指南
- NeonClock遗产版:包名更迭与应用更新
