DSP实现的NNC-PID智能控制器在电液位置控制中的应用
74 浏览量
更新于2024-08-29
收藏 443KB PDF 举报
"NNC-PID控制器对电液位置控制系统的DSP实现"
本文主要探讨了在电液位置伺服控制系统中,通过结合神经网络控制器(NNC)和传统的PID控制器来实现更高效的智能控制策略。电液位置伺服控制系统的特点包括非线性特性、不确定性、时变性、外部干扰以及交叉耦合干扰,这些因素使得设计一个精确的控制模型极具挑战性。
常规PID控制器因其简洁的结构、明确的参数含义以及良好的动态和静态性能而被广泛应用。然而,对于具有复杂特性的电液系统,单纯的PID控制可能无法达到理想的效果。人工神经网络(NNC)则能够弥补这一不足,它能整合信息、具备学习和记忆功能,能够近似任何非线性函数,尤其适用于难以用传统模型描述的复杂过程。尽管NNC有其优势,但可能存在陷入局部最优的问题,导致控制效果不尽人意。
为了解决这些问题,本文提出了采用数字信号处理器(DSP)来实现NNC-PID控制器的方法。通过这种方式,可以结合NNC的非线性处理能力和PID控制器的稳定性,以提高电液位置伺服控制系统的响应速度和精度。具体来说,采用的是TI公司的TMS320F2812 DSP芯片,该芯片拥有强大的处理能力,150MHz的工作频率,32位定点CPU,以及丰富的外设资源,如A/D转换器和GPIO引脚,非常适合于实时控制系统。
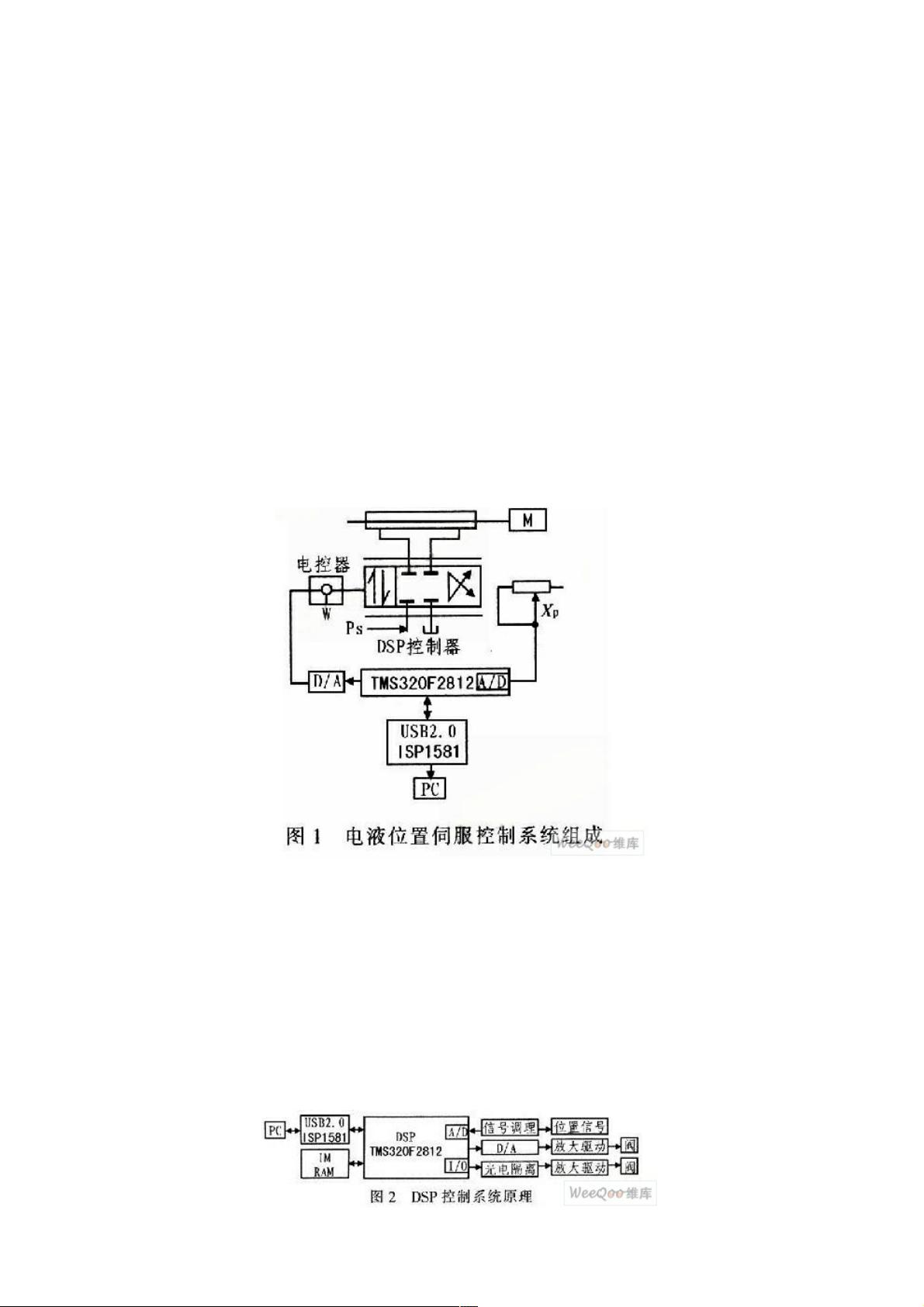
在系统构成方面,以喷漆机械手的关节作为研究对象,构建了一个实验平台,其中包括精密电位计作为反馈设备,整个系统由DSP为核心,配合位置传感器、A/D和D/A转换器、信号调理电路、输出驱动电路以及上位机PC,实现精准定位和伺服跟踪控制。
在硬件设计中,TMS320F2812 DSP作为核心处理器,负责运行控制算法,包括NNC-PID算法。12位A/D转换器用于采集系统状态信息,D/A转换器则将处理后的控制信号转化为模拟信号输出。通过信号调理电路和输出放大驱动电路,确保控制信号的质量和强度满足系统需求。上位机PC则用于监控系统状态和参数调整。
NNC-PID控制器的DSP实现为电液位置伺服控制系统提供了一种有效且灵活的控制方案,它能够应对复杂的系统特性,提升控制性能,并通过实时处理能力确保系统的快速响应和高精度控制。
NNC-PID控制器对电液位置控制系统的控制器对电液位置控制系统的DSP实现实现
电液位置伺服控制系统的典型特征是非线性、不确定性、时变性、外界干扰和交叉耦合干扰等,系统的数学模
型不易建立。因此,对电液系统的控制一直是一个复杂控制系统问题。 常规PID控制器具有结构简单、参
数意义明确、控制的动态和静态特性优良等特点。人工神经网络(NNC)具有信息综合、学习记忆和自适应能力、
逼近任意非线性函数的能力,可以处理那些难以用模型和规则描述的过程,但也存在局部点,不易达到控制。
将NNC与PID控制相结合组成智能控制器可以取得更好的控制效果,这里提出采用DSP实现NNC-PID控制
器对电液位置系统进行智能控制,满足电液位置伺服对控制系统响应快和高精度的要求。 1 电
电液位置伺服控制系统的典型特征是非线性、不确定性、时变性、外界干扰和交叉耦合干扰等,系统的数学模型不易建
立。因此,对电液系统的控制一直是一个复杂控制系统问题。
常规PID控制器具有结构简单、参数意义明确、控制的动态和静态特性优良等特点。人工神经网络(NNC)具有信息综合、
学习记忆和自适应能力、逼近任意非线性函数的能力,可以处理那些难以用模型和规则描述的过程,但也存在局部点,不易达
到控制。
将NNC与PID控制相结合组成智能控制器可以取得更好的控制效果,这里提出采用DSP实现NNC-PID控制器对电液位置
系统进行智能控制,满足电液位置伺服对控制系统响应快和高精度的要求。
1 电液位置伺服系统构成电液位置伺服系统构成
以喷漆机械手关节为对象,构造了研究实验装置,如图1所示。其中反馈器件采用精密导电塑料电位计。整个控制系统以
DSP为、由喷漆机械手关节、位置传感器、12位A/D转换器和D/A转换器、信号调理电路和输出放大驱动电路以及上位机PC等
组成,实现定位和伺服跟踪控制。
2 控制系统硬件设计控制系统硬件设计
TMS320F2812是TI公司推出的2000系列的数字信号处理(DSP),主要应用在控制领域。频率达150 MHz,定点32位的
CPU,可运行16×16和32×32的运算。片上高达128 KB的程序存储器,128 KB的ROM和18 KB的SARAM,外部接口16位数
据线和19位地址线,可外扩l MB的ROM。此外还集成有16通道的12位的A/D转换器,化周期80 ns,以及56个可单独编程的通
用I/0(GPIO)引脚。高速的数字信号处理能力及丰富的外扩资源使TMS320F2812适合应用在要求较高的控制系统。
2.1 控制系统总体结构控制系统总体结构
控制系统采用了PC+DSP的控制方案,系统总体结构如图2所示。其中PC机主要用来显示控制界面,调节各控制参数,实
时显示各相关信号。而DSP则完成低层的控制功能,通过A/D转换器采集各路信号,经过一定的算法处理后,由D/A口输出,
以及通过I/0口、光电隔离驱动放大电路来控制各电磁阀的开关。同时通过通信,向PC机发送采集来的信号,并接收PC机的起
动、停止等指令以及各控制参数。
2.2 A/D转换电路转换电路
下载后可阅读完整内容,剩余4页未读,立即下载
2020-11-05 上传
2020-11-06 上传
点击了解资源详情
点击了解资源详情
2021-04-16 上传
2020-10-26 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38631599
- 粉丝: 9
- 资源: 943
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端协作项目:发布猜图游戏功能与待修复事项
- Spring框架REST服务开发实践指南
- ALU课设实现基础与高级运算功能
- 深入了解STK:C++音频信号处理综合工具套件
- 华中科技大学电信学院软件无线电实验资料汇总
- CGSN数据解析与集成验证工具集:Python和Shell脚本
- Java实现的远程视频会议系统开发教程
- Change-OEM: 用Java修改Windows OEM信息与Logo
- cmnd:文本到远程API的桥接平台开发
- 解决BIOS刷写错误28:PRR.exe的应用与效果
- 深度学习对抗攻击库:adversarial_robustness_toolbox 1.10.0
- Win7系统CP2102驱动下载与安装指南
- 深入理解Java中的函数式编程技巧
- GY-906 MLX90614ESF传感器模块温度采集应用资料
- Adversarial Robustness Toolbox 1.15.1 工具包安装教程
- GNU Radio的供应商中立SDR开发包:gr-sdr介绍
