基于DSP与NNC-PID的电液伺服系统高精度控制设计
15 浏览量
更新于2024-08-30
收藏 302KB PDF 举报
本文主要探讨的是"基于DSP NNC-PID的电液位置伺服控制系统设计"。在汽车制造业中,电液位置伺服系统因其强大的功率、快速的响应速度和高精度的特点,在机械手(如焊装、喷漆)以及机床(如冲压、压铸)等设备中广泛应用。这类系统的成功运行依赖于精确的控制,既要保证定位精度,也要具备良好的伺服跟踪性能,因此它是控制系统设计的关键部分。
电液位置伺服控制系统面临着诸多挑战,包括非线性、不确定性、时变性、外界干扰和交叉耦合干扰等问题。传统的PID控制器虽然以其结构简单、参数易于理解、动态和静态性能优良而受到青睐,但在处理这些复杂情况时可能存在局限。为了克服这些问题,文章引入了人工神经网络(NNC),其信息综合、学习记忆和自适应能力使其能够应对非线性和难以建模的过程,尽管存在局部优化难题。
通过结合NNC和PID控制器,研究人员构建了一种智能控制器,旨在提高控制系统的性能。以喷漆机械手的第一关节为例,设计了一个实验装置,该装置的核心是DSP——TMS320F2812,这是由TI公司开发的2000系列数字信号处理器,其高速CPU和丰富的内部资源(如大容量程序存储器、A/D转换器等)使其成为高性能控制系统的理想选择。
该控制系统硬件设计包括精密导电塑料电位计作为反馈器件,以及位置传感器、A/D和D/A转换器、信号调理电路、输出放大驱动电路,以及上位机PC等组成部分。PC负责提供用户界面,而DSP则负责实时数据处理和控制决策。整个系统采用PC+DSP的协同工作模式,通过高效的数字信号处理技术,确保了电液位置伺服控制系统的稳定性和准确性。
这篇文章深入研究了如何利用DSP的高效处理能力和NNC的自适应功能,优化电液位置伺服控制系统的性能,以满足汽车制造中高精度和高效率的要求。这种结合了传统控制方法与先进算法的控制系统设计,对于提升工业自动化水平具有重要意义。
基于基于DSP NNC-PID的电液位置伺服控制系统设计的电液位置伺服控制系统设计
在汽车制造过程中,大量应用电液位置伺服式机械手(焊装、喷漆)、机床(冲、压)以及其他加工装置。电液位置
伺服系统具有功率大、响应快、精度高的特点,这就要求控制系统不仅有良好的定位精度,而且要有好的伺服
跟踪性能,因此是控制领域中的一个重要组成部分。电液位置伺服控制系统的典型特征是非线性、不确定性、
时变性、外界干扰和交叉耦合干扰等,系统精确的数学模型不易建立。因此,对电液系统的控制一直是一个复
杂控制系统问题。
在汽车制造过程中,大量应用电液位置伺服式机械手(焊装、喷漆)、机床(冲、压)以及其他加工装置。电液位置伺服系统具有
功率大、响应快、精度高的特点,这就要求控制系统不仅有良好的定位精度,而且要有好的伺服跟踪性能,因此是控制领域中
的一个重要组成部分。
常规PID控制器具有结构简单、参数意义明确、控制的动态和静态特性优良等特点。人工神经网络(NNC)具有信息综合、
学习记忆和自适应能力、逼近任意非线性函数的能力,可以处理那些难以用模型和规则描述的过程,但也存在局部最小点,不
易达到最优控制。
将NNC与PID控制相结合组成智能控制器可以取得更好的控制效果,这里提出采用
1 电液位置伺服系统构成电液位置伺服系统构成
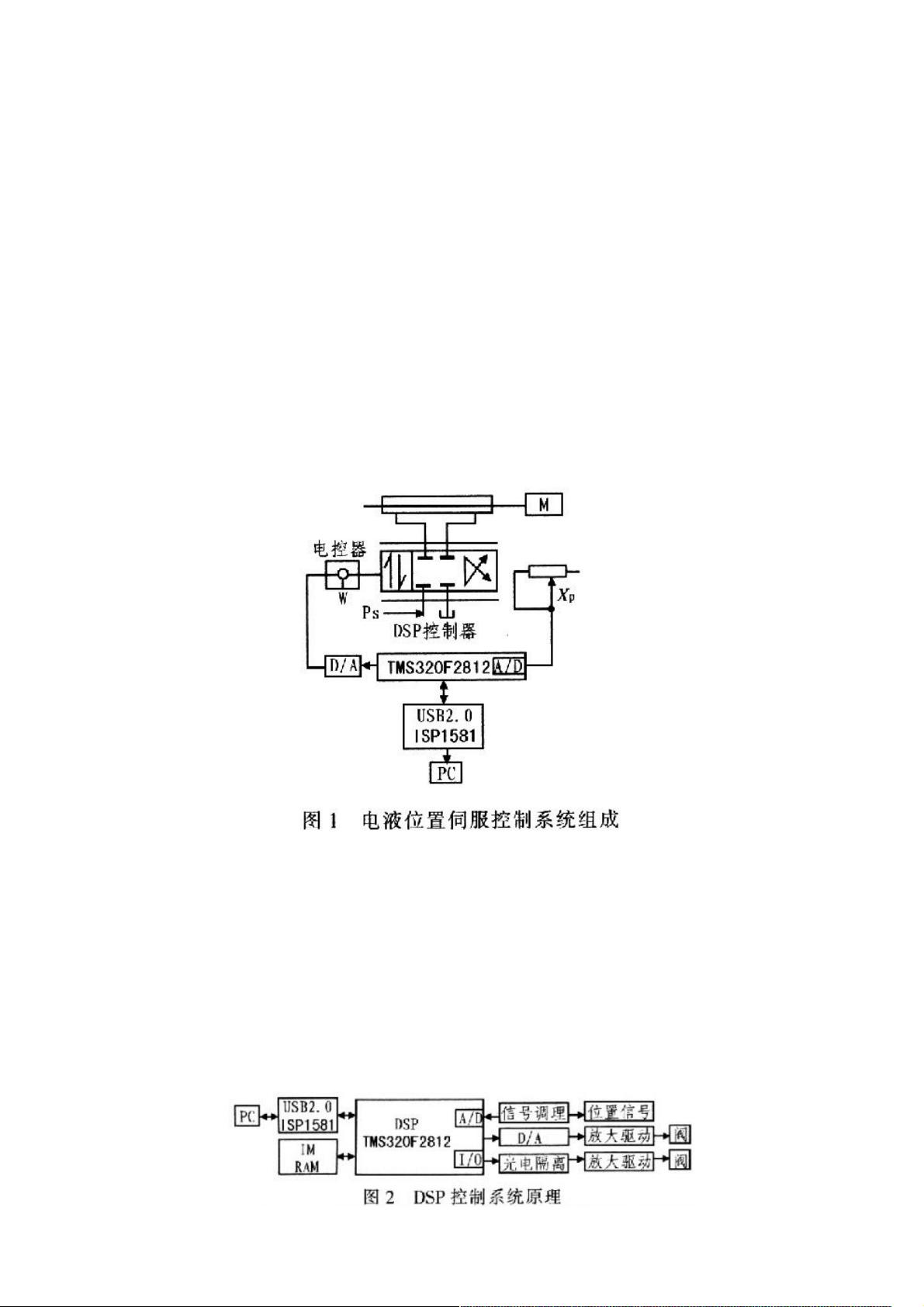
以喷漆机械手第一关节为对象,构造了研究实验装置,如图1所示。其中反馈器件采用精密导电塑料电位计。整个控制
系统以DSP为核心、由喷漆机械手第一关节、位置传感器、12位A/D转换器和D/A转换器、信号调理电路和输出放大驱动电路
以及上位机PC等组成,实现定位和伺服跟踪控制。
2 控制系统硬件设计控制系统硬件设计
TMS320F2812是TI公司推出的2000系列的数字信号处理(DSP),主要应用在控制领域。频率达150 MHz,定点32位的
CPU,可运行16×16和32×32的运算。片上高达128 KB的程序存储器,128 KB的ROM和18 KB的SARAM,外部接口16位数
据线和19位地址线,可外扩l MB的ROM。此外还集成有16通道的12位的A/D转换器,最小化周期80 ns,以及56个可单独编程
的通用I/0(GPIO)引脚。高速的数字信号处理能力及丰富的外扩资源使TMS320F2812适合应用在要求较高的控制系统。
2.1 控制系统总体结构
控制系统采用了PC+DSP的控制方案,系统总体结构如图2所示。其中PC机主要用来显示控制界面,调节各控制参数,
实时显示各相关信号。而DSP则完成低层的控制功能,通过A/D转换器采集各路信号,经过一定的算法处理后,由D/A口输
出,以及通过I/0口、光电隔离驱动放大电路来控制各电磁阀的开关。同时通过通信,向PC机发送采集来的信号,并接收PC机
的起动、停止等指令以及各控制参数。
2.2 A/D转换电路
下载后可阅读完整内容,剩余4页未读,立即下载
186 浏览量
2020-10-25 上传
2020-10-26 上传
186 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情
192 浏览量
192 浏览量

weixin_38732252
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 利用dlib库实现99.38%精确度的人脸识别技术
- 深入解析AT91 NAND控制器的技术要点
- React Cube Navigation:实现Instagram故事风格的3D立方体导航
- STM32控制ESP8266实现OneNet云MQTT开关控制源代码示例
- 深入探索多边形有效边表填充算法原理与实现
- Gitblit Windows版搭建开源项目服务器指南
- C++教学管理系统:详解与调试
- React Native集成JPush插件教程与Android平台支持
- TravelFeed帖子的tf内容呈现器技术解析
- Android四页面Activity跳转实战教程
- Ruby编程语言第二天习题解答详解
- 简化伺服调试:探索ServoPlus Arduino库的新特性
- 惠普hp39gs计算器使用指南解析
- STM32F103与VL53L0X红外测距模块的集成方案
- 北大青鸟y2CRM系统结业项目源码及需求分析
- 深入解析贴吧扫号机的操作与功能
