视觉SLAM入门指南:理论与实战详解
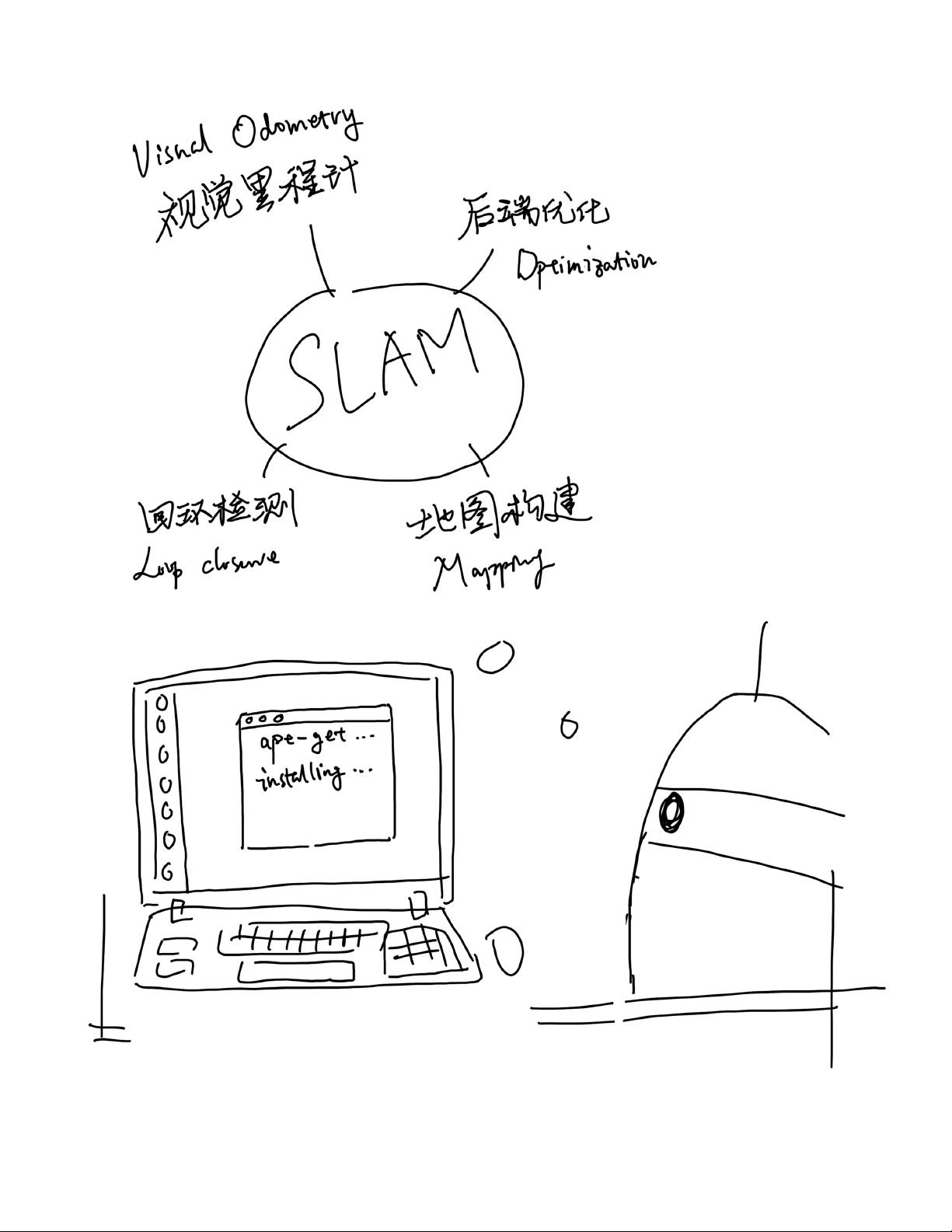
《视觉SLAM十四讲(高翔第二版)》是一本深度剖析视觉SLAM技术的专著,由高翔等人撰写,旨在为对SLAM感兴趣的科研人员以及相关专业的本科生和研究生提供全面的学习资料。本书围绕视觉SLAM的核心概念展开,内容涵盖了丰富的数学理论基础,如三维空间中的刚体运动理论和非线性优化方法,这些都是SLAM算法设计和理解的关键。
作者通过系统讲解,让读者掌握计算机视觉中的核心算法,比如多视图几何原理,它是理解相机如何通过不同视角捕获图像并推断场景结构的基础。回环检测则是SLAM中识别重复环境特征,确认机器人位置的重要手段,对于长期自主导航至关重要。
除了理论阐述,本书还强调实践经验,提供了大量的实例代码,帮助读者亲手实践和深入理解这些理论知识。无论是初次接触SLAM的初学者,还是希望进一步提升技术水平的从业者,都能从中受益匪浅。
作为教材,这本书适合进行自我学习,也可以作为课堂教学的辅助材料,便于教师组织讨论和实验环节。书中特别强调版权保护,所有内容未经许可不得复制或抄袭,并提供了版权信息和联系方式,以便读者获取更多资源和服务。
读者在阅读过程中,需要注意书中所使用的色彩描述与实际印刷可能存在差异,部分图片需要在线查看或下载以获得最佳效果。同时,通过注册博文视点社区,读者可以获取更多本书的配套资源,如示例代码和提交勘误的功能,进一步提升学习体验。
《视觉SLAM十四讲(高翔第二版)》是一本实用性和理论性兼备的教材,对于理解和应用SLAM技术具有很高的价值。

我的邮箱是:gao.xiang.thu@gmail.com。
感谢我的爱人刘丽莲女士长期的理解和支持。这本书是献给她的。
习题(基本知识自测题)
1. 有线性方程 Ax = b,若已知 A, b,需要求解 x,该如何求解?这对 A 和 b 有哪些要求?提
示:从 A 的维度和秩角度来分析。
2. 高斯分布是什么?它的一维形式是什么样子?它的高维形式是什么样子?
3. 你知道 C++ 中的类吗?你知道 STL 吗?你使用过它们吗?
4. 你以前怎样书写 C++ 程序?(你完全可以说只在 Visual C++ 6.0 下写过 C++ 工程,只要你有
写 C++ 和 C 语言的经验就行。)
5. 你知道 C++11 标准吗?其中哪些新特性你听说过或用过?有没有其他的标准?
6. 你知道 Linux 吗?你有没有至少使用过一种(不算安卓),比如 Ubuntu?
7. Linux 的目录结构是什么样的?你知道哪些基本命令,比如 ls, cat 等?
8. 如何在 Ubuntu 中安装软件(不打开软件中心的情况下)?这些软件被安装在什么地方?如
果只知道模糊的软件名称(比如想要装一个名称中含有 eigen 的库),应该如何安装它?
9.
∗
花一个小时学习一下 Vim,因为你迟早会用它。你可以在终端中输入 vimtutor 阅读一遍所有
内容。我们不需要你非常熟练地操作它,只要能够在学习本书的过程中使用它输入代码即
可。不要在它的插件上浪费时间,不要想着把 Vim 用成 IDE,我们只用它做文本编辑的工
作。


剩余235页未读,继续阅读
2022-08-03 上传
2023-08-31 上传
2024-03-03 上传
2023-10-20 上传
2023-06-23 上传
2023-07-30 上传
2023-08-25 上传

AIAlchemist
- 粉丝: 754
- 资源: 304
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android圆角进度条控件的设计与应用
- mui框架实现带侧边栏的响应式布局
- Android仿知乎横线直线进度条实现教程
- SSM选课系统实现:Spring+SpringMVC+MyBatis源码剖析
- 使用JavaScript开发的流星待办事项应用
- Google Code Jam 2015竞赛回顾与Java编程实践
- Angular 2与NW.js集成:通过Webpack和Gulp构建环境详解
- OneDayTripPlanner:数字化城市旅游活动规划助手
- TinySTM 轻量级原子操作库的详细介绍与安装指南
- 模拟PHP序列化:JavaScript实现序列化与反序列化技术
- ***进销存系统全面功能介绍与开发指南
- 掌握Clojure命名空间的正确重新加载技巧
- 免费获取VMD模态分解Matlab源代码与案例数据
- BuglyEasyToUnity最新更新优化:简化Unity开发者接入流程
- Android学生俱乐部项目任务2解析与实践
- 掌握Elixir语言构建高效分布式网络爬虫
