BtcDet:利用LiDAR克服遮挡的3D对象检测新方法
140 浏览量
更新于2024-06-19
收藏 6.31MB PDF 举报
"基于LiDAR的遮挡图像在3D对象检测中的研究"
随着LiDAR传感器技术的快速发展,3D场景理解的需求日益增强。然而,由于物理限制,LiDAR点云通常表现为2.5D,因为它们只能捕获物体的部分形状,这导致了遮挡和信号丢失的问题。这些因素,如外部遮挡(如建筑物或树木)、信号传播中断(如雷达反射不足)以及物体自身的自遮挡,都会显著影响3D感知的准确性。
针对这一挑战,本文提出了一种创新的3D对象检测模型——幕后检测器(BtcDet)。BtcDet的关键在于它能够学习并利用对象的形状先验,通过识别和处理遮挡区域来弥补信息缺失。模型首先通过分析LiDAR点云,确定哪些区域受到遮挡和信号缺失的影响,然后预测这些区域内的占用概率,即对象存在的可能性。这个概率图与后续的建议细化模块相结合,帮助生成高质量的3D对象候选框,从而提高检测精度。
作者Xiangeng Xu、Yiqi Zhong和Ulrich Neumann在南加州大学的研究中,通过比较和实验验证了BtcDet在KITTI数据集(Geiger等人,2013)和Waymo开放数据集(Sun等人,2019)上的有效性。特别是在面对高遮挡场景,如图1所示的汽车实例,BtcDet展现出优于其他现有方法的性能。研究者强调了理解形状丢失原因和其对3D物体检测影响的重要性,这不仅限于汽车,还适用于其他类型的交通工具和环境中的物体。
值得注意的是,BtcDet的源代码已经发布,为学术界和工业界提供了宝贵的学习资源和实践参考。这项工作表明,利用深度学习和形状先验可以显著提升LiDAR在3D物体检测中的鲁棒性和准确性,这对于自动驾驶、机器人导航等领域的应用具有重要意义。未来的研究可能将进一步探索如何优化遮挡处理算法,以适应更复杂且动态变化的3D环境。
+v:mala2255获取更多论
文
S
S
×
×
−
−
P O
S
×
×
L
L
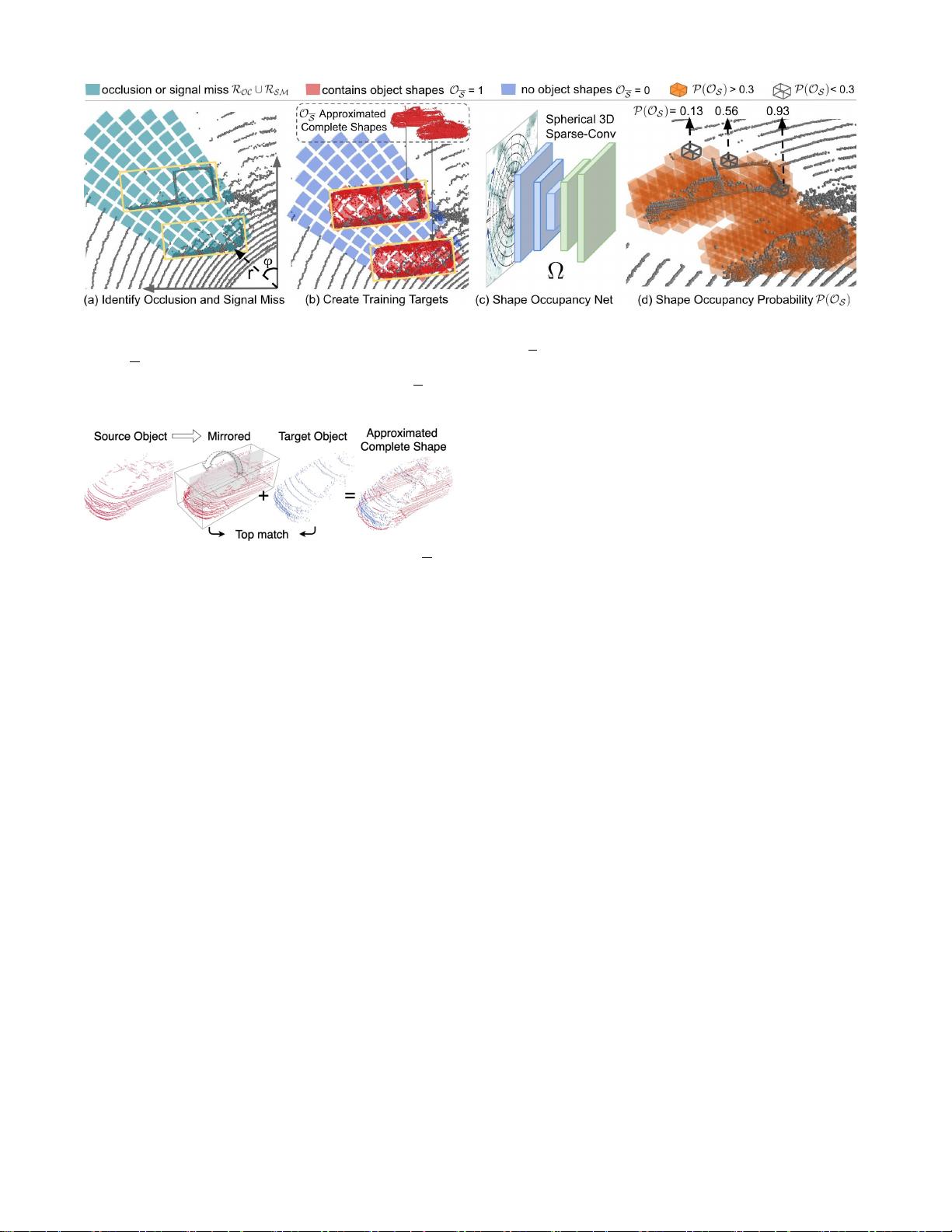
图4:学习被阻塞的。(a)在对点云进行球面体素化之后,可以识别出遮挡或信号缺失区域
R
OC
_
SM
。(b)为了标记占用
O
(1或0),我们将近似的完全对象
在相应的框中的形状S(红点)。(c)形状占用网络预测形状占用概率
P(O
S
),用于R
OC
R
SM
中的体素
,由O
S
监督
。(
d
)如果预测P(
OS
)
> 0
,则体素被着色为橙色
。
3.
图5:通过使用顶部匹配对象的点为对象(蓝色)组装
近似的完整形状
其中
f
in
、
f
out
和
maxpool
i
−
1
(
·
)
表示输入
fea
。
ROI池化。在每一个建议,我们构建本地网格具有相
同的标题的建议。为了扩大感受野,我们设置一个尺
寸因子µ
,
以便:
w
网格
=μ
·
w
p
,
l
网格
=μ
·
l
p
,
h
网格
=μ
·
h
p
。
(十)
网格的维数为12 4 二、我们把 通过三线性插值
(见图3)将附近的特征f
geo
到附近的网格上,并通过
稀疏3D卷积将它们聚集。之后,细化模块预测IoU相关
的类置信度得分以及3D建议框与地面真值边界
吉
吉
的特征
i
−
1
×2
框,以下(Yanet al. 2018;Shi等人2020年)。
第
以及分别应用stride-2maxpooling 1次。区域建议网络
(RPN)采用了三维模型的输出特征,并生成3D建
议。每种方案包括(
xp
,
yp
,
zp
)
,
(
lp
,
wp
,
hp
)
,
θ
p
,
pp
,即中心位置。
建议箱大小、标题和建议置信度。
3.3
遮挡感知建议优化
局部几何特征。BtcDet为了获得准确的最终边界框,
BtcDet需要查看提案周围的局部几何形状。因此,我们
通过融合多个层次的特征,构造了一个局部特征映
射。此外,我们还融合 ( ) 进入f
geo
让人们意
识到当地的形状缺失。P(O
S
)
模型
为提案细化提供了两
个好处:
•
P(O
S
)
R
仅在R OC
R
SM
中具有值,因此它可以帮
助盒回归避免R OC
R
SM
之外的区域
,
例如,图
3
中
带有十字标记的区域。
•
估计的占用率指示未观察到的对象形状的存在,特
别是对于具有高
P
(
OS
)的空区域,例如,图3中的
一些橙色区域。
f
geo
是一个稀疏的3D张量地图,空间分辨率为
400 352 五、生产f
geo
的工艺见附录D。
3.4
全损
RPN损失
rpn
和建议的细化损失
pr
遵循检测器中最流行的
设计(Shi et al. 2020;Yan等人,2018)。总损失为:
L
总计
= 0
。
3
L
形
+
L
rpn
+
L
pr
。
(十
一)
有关损耗和网络架构的更多详细信息,请参见附录C和
D。
4
个实验
在本节中,我们将描述BtcDet的实现细节,并将BtcDet
与两个数据集上的最先进检测器进行比较:KITTI数据
集(Geiger et al.2013)和Waymo Open Dataset(Sun et
al.2019)。我们还进行了消融研究,以证明形状占用
和特征整合策略的有效性。更多检测结果见附录F。入
住率估算的定量和定性评价见附录E和H。
数据集。KITTI
数据集
包括7481个用于训练的LiDAR帧
和7518个用于测试的LiDAR帧。我们遵循(Chen et al.
2017)以将训练数据划分为3712帧的
训练
分割和3769
帧的val分割
剩余22页未读,继续阅读
2021-03-17 上传
2023-05-05 上传
2023-06-05 上传
2023-06-21 上传
2023-09-16 上传
2023-06-10 上传
2023-06-01 上传
2023-09-16 上传

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- AirKiss技术详解:无线传递信息与智能家居连接
- Hibernate主键生成策略详解
- 操作系统实验:位示图法管理磁盘空闲空间
- JSON详解:数据交换的主流格式
- Win7安装Ubuntu双系统详细指南
- FPGA内部结构与工作原理探索
- 信用评分模型解析:WOE、IV与ROC
- 使用LVS+Keepalived构建高可用负载均衡集群
- 微信小程序驱动餐饮与服装业创新转型:便捷管理与低成本优势
- 机器学习入门指南:从基础到进阶
- 解决Win7 IIS配置错误500.22与0x80070032
- SQL-DFS:优化HDFS小文件存储的解决方案
- Hadoop、Hbase、Spark环境部署与主机配置详解
- Kisso:加密会话Cookie实现的单点登录SSO
- OpenCV读取与拼接多幅图像教程
- QT实战:轻松生成与解析JSON数据
