机器人竞赛初审方案:智能避障与自动补货
需积分: 0 45 浏览量
更新于2024-08-04
收藏 2.63MB DOCX 举报
"初审方案1"
本文将详细介绍一个机器人设计的初步方案,该方案涵盖了机器人的功能设计、取胜策略、可能出现的问题以及各个组件的选择。机器人的核心功能包括机械臂操作、视觉识别、避障和巡线。设计考虑了重量、尺寸限制以及各个组件的协同工作。
1.1 机器人功能设计
机器人由机械、电路和控制三大部分组成。机械部分包括驱动轮、电机和机械臂;电路部分涉及电路布局和传感器;控制部分由上位机、基于C++和OpenCV的视觉识别程序以及不同结构间的通信构成。机器人最大重量限制为5KG,尺寸为350mm*350mm。
1.2 取胜思路和可行性分析
针对比赛中可能出现的障碍物,机器人采用避障策略。首先识别并取出内圈的货物,然后在外圈补充货架,反复进行此过程。考虑到复杂的路径可能导致更多的转弯和避障问题,选择简单路线可能是更安全、高效的选择。
2. 抓取和巡线技术
- 抓取物体:结合超声波传感器和摄像头模块来定位和抓取物体。可能需要增强图像识别算法以应对物体倾倒的情况。
- 巡线:采用红外传感器进行主巡线,超声波传感器辅助定位,以防止迷路。
3. 遇到的问题及解决方案
- 物体掉落:超声波传感器检测到非物体障碍时,启动程序拾取并归位。
- 迷路:通过超声波传感器确定位置,识别货架和空位来调整方向。
- 其他问题:如遇故障,考虑重启机器人。
4. 机械设计
- 机械臂:选用现成的6自由度机械臂,底部云台可270度旋转。
- 顶层:放置机械臂、摄像头和货仓,三层亚克力板结构。
- 中间层:安装上位机电脑,负责通信。
- 最下层:下位机、传感器模块、电池和72mm橡胶车轮。
- 电机选择:根据机器人重量、滚动摩擦系数、速度和轮子半径计算,选择能满足动力需求的电机。
这个设计方案充分考虑了比赛规则和实际操作中的挑战,通过合理的组件配置和策略规划,旨在实现高效、准确的货物搬运和补货任务。然而,实际应用中还需要不断优化和调试,确保各个部分的稳定性和整体性能。
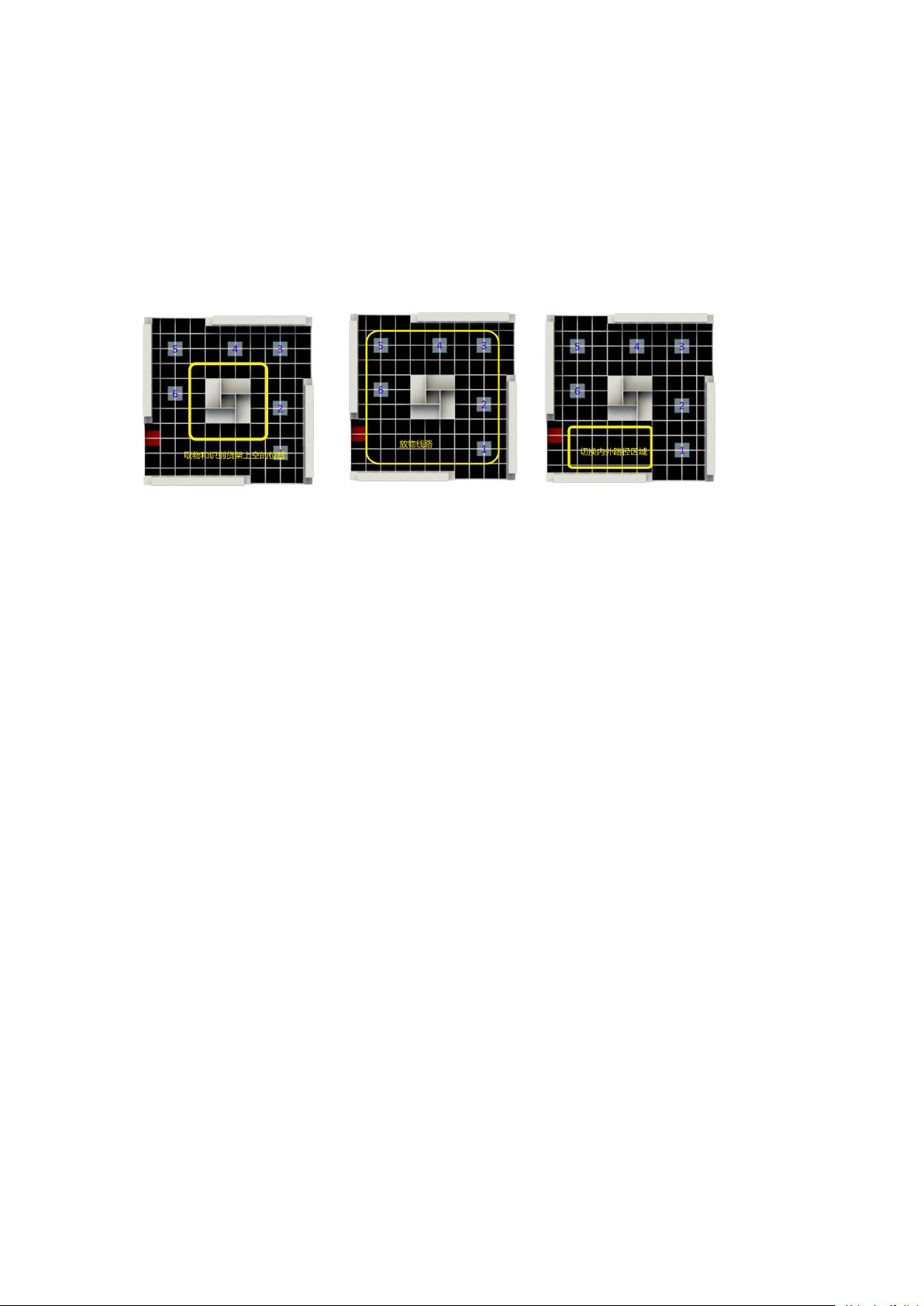
先进入内圈识别补货区的物体,并取下三个一号货架上所需的货物。一圈之后进入外圈
对一号货架进行补货和识别。随后再进入内圈取货,进入外圈补货,循环往复,直到货架都
被放置。
虽然可以通过算法减少所走路程,但随之而来的是大量的转弯和避障,加之此次比赛无
法使用全向轮,又要在逼仄(有障碍物处)转弯,都给小车定位和安全造成风险,走简单路
线并不见得花费更多时间。
抓取物体:抓取物体时利用超声波传感器(可能不好用)配合照相模块来定位抓取。
巡线:红外巡线 4*4(或 3*4)在车的头部,左右侧安装巡线传感器(主)配合车头车
尾的超声波传感器定位(辅/主要在迷路的时候重定位)
可能遇到的问题(目前想到的):
物体倾倒:增强图像识别
物体掉落在地上:一上一下的超声波传感器发现前方障碍物不是物块,则进入附加程序,
拾起障碍物,将其放回补货架上。
迷路:通过超声波,确定自己是否在外圈路径中,若不是,则进入外圈。随后识别货架
上的物体和空货架位置,来判断方位。(因为每个方格和巡迹线是一一对应的)
其他:凉了,重启吧。
二、机械部分
2.1 机械臂
在多次设计后又推翻之后,我们选择购买设计好的 6 自由度机械臂。底部云台可以实现
270 度的旋转,较为灵活。
剩余13页未读,继续阅读
2021-10-07 上传
2023-06-09 上传
2023-07-08 上传
2023-06-02 上传
2024-01-30 上传
2023-05-31 上传
2023-05-22 上传
2023-09-18 上传

查理捡钢镚
- 粉丝: 23
- 资源: 317
 我的内容管理
展开
我的内容管理
展开







最新资源
- 解决本地连接丢失无法上网的问题
- BIOS报警声音解析:故障原因与解决方法
- 广义均值移动跟踪算法在视频目标跟踪中的应用研究
- C++Builder快捷键大全:高效编程的秘密武器
- 网页制作入门:常用代码详解
- TX2440A开发板网络远程监控系统移植教程:易搭建与通用解决方案
- WebLogic10虚拟内存配置详解与优化技巧
- C#网络编程深度解析:Socket基础与应用
- 掌握Struts1:Java MVC轻量级框架详解
- 20个必备CSS代码段提升Web开发效率
- CSS样式大全:字体、文本、列表样式详解
- Proteus元件库大全:从基础到高级组件
- 74HC08芯片:高速CMOS四输入与门详细资料
- C#获取当前路径的多种方法详解
- 修复MySQL乱码问题:设置字符集为GB2312
- C语言的诞生与演进:从汇编到系统编程的革命
