MATLAB教程:第11章 - 机器人视觉与控制:图像形成原理
需积分: 10 12 浏览量
更新于2024-07-19
收藏 30.54MB PDF 举报
本章节探讨了机器人和人类感知世界的第一步——图像形成。在机器人大师Peter Corke的著作《机器人学、视觉与控制基础算法MATLAB英文版》中,第11章深入讲解了这一关键概念。该章节涵盖了广泛的主题,包括工业机器人、移动机器人以及航空器等各类机器人系统,以及机器视觉技术,特别强调了MATLAB机器人工具箱和机器视觉工具箱的应用。
首先,作者介绍了传统的光学原理,如通过一个简单的针孔(pin-hole camera)如何在暗室的墙上形成倒置的影像,这是所有生物体,如海螺(如Nautilus)的眼睛和大多数脊椎动物视网膜上的感光细胞(如视杆细胞和视锥细胞)排列所依据的基础。这种成像过程实际上与数码相机的工作原理相似,即通过玻璃或塑料透镜将三维世界投射到半导体芯片表面,形成由感光设备组成的阵列,将光线转化为数字图像。
然而,从图像中获取信息并非易事,因为这个转换过程丢失了深度信息。我们无法仅从二维图像分辨远处大物体和近处小物体的大小差异,这被称为透视投影。为了理解这种现象,我们需要了解图像形成的步骤,包括景物中的三维点被镜头捕获并通过成像矩阵映射到二维平面上,形成像素分布。在这个过程中,摄像机或眼睛通过焦距、光圈、视场角等因素调整来捕捉不同距离和大小的物体,但最终的结果是一个二维投影。
在MATLAB中,学习者可以利用这些理论知识实践各种图像处理和分析算法,比如测距、特征检测、目标识别等,这些都是机器视觉的关键组成部分。同时,对于机器人控制而言,精确的视觉输入是实现导航、定位、抓取等任务的重要保障。本章提供的实例代码有助于读者掌握如何在实际项目中运用这些算法,从而在机器人学和机器视觉领域取得突破。
第11章“图像形成”为读者提供了一个坚实的理论基础和实践经验,不仅涉及光学原理,还包括MATLAB编程技术在机器人视觉中的应用,是理解和掌握机器人学和机器视觉核心技术的必备章节。通过深入学习,读者将能够设计并实施高效的机器人视觉系统,使其在复杂环境中执行高效的任务。
256
(11.7)
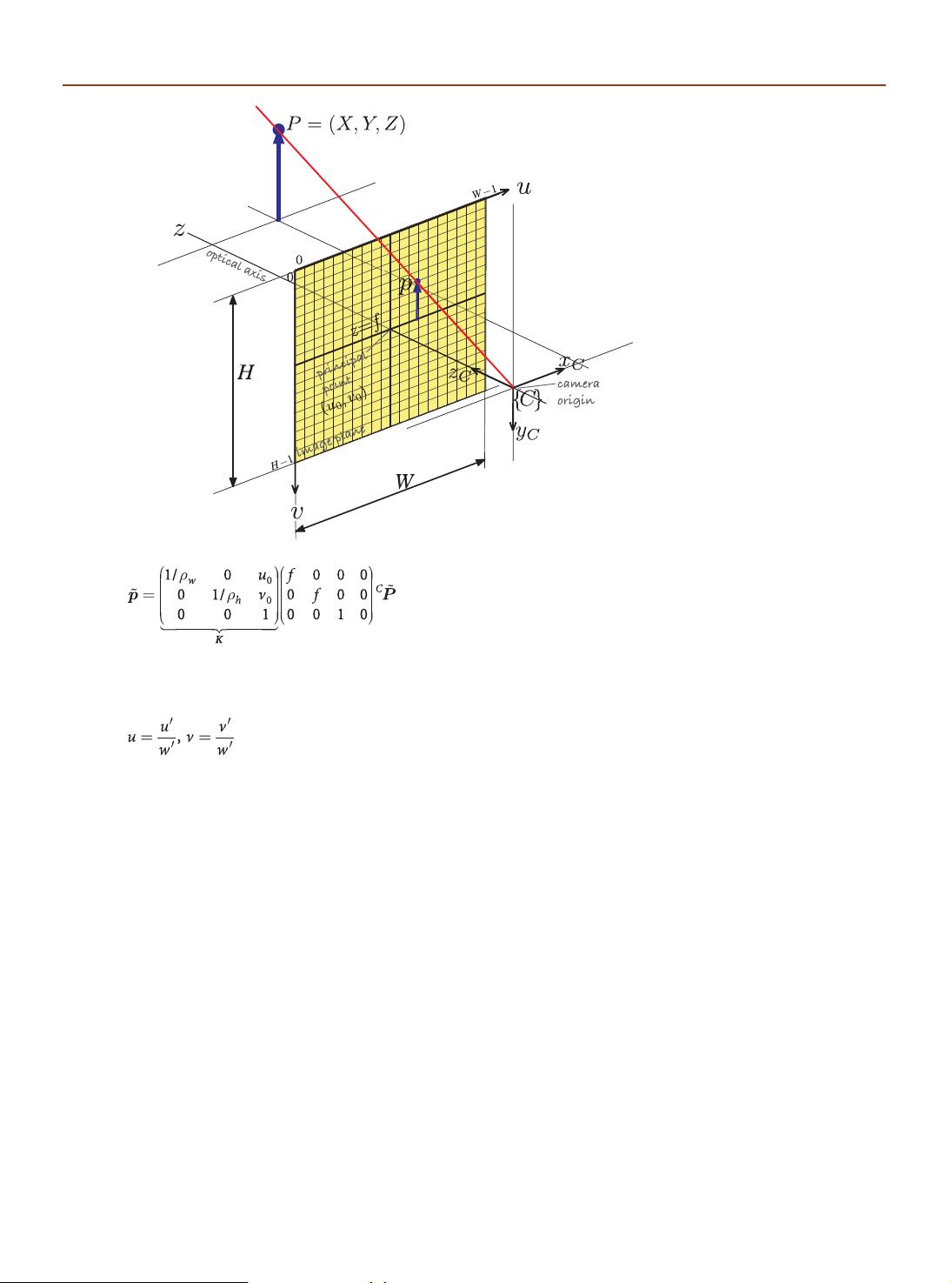
where p = (u
′, v′, w′) is the homogeneous coordinate of the world point P in pixel
coordinates.
The non-homogeneous image-plane pixel coordinates are
(11.8)
For example if the pixels are 10 µm square and the pixel array is 1 280 × 1 024 pix-
els with its principal point at image plane coordinate (640, 512) then
>> cam = CentralCamera('focal', 0.015, 'pixel', 10e-6, ...
'resolution', [1280 1024], 'centre', [640 512], 'name', 'mycamera')
name: mycamera [central-perspective]
focal length: 0.015
pixel size: (1e-05, 1e-05)
principal pt: (640, 512)
number pixels: 1280 x 1024
Tcam:
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
which displays the parameters of the imaging model. The corresponding non-homo-
geneous image plane coordinates of the previously defined world point are
>> cam.project(P)
ans =
790
712
Combining Eq. 11.6 and Eq. 11.7 we can write the camera projection in general form as
Fig. 11.5.
Central projection model
showing image plane and
discrete pixels
The matrix K is often written with a fi-
nite value at K[1,2] to represent skew.
This accounts for the fact that the u- and
v-axes are not orthogonal, which with
precise semiconductor fabrication pro-
cesses is quite unlikely.
Chapter 11
·
Image Formation

剩余32页未读,继续阅读
2017-09-24 上传
2016-06-17 上传
2019-07-23 上传
2024-01-17 上传
2023-06-28 上传
2023-06-02 上传
2023-05-12 上传
2024-03-31 上传
2023-04-22 上传

qq_14903801
- 粉丝: 5
- 资源: 25
 我的内容管理
展开
我的内容管理
展开







最新资源
- zlib-1.2.12压缩包解析与技术要点
- 微信小程序滑动选项卡源码模版发布
- Unity虚拟人物唇同步插件Oculus Lipsync介绍
- Nginx 1.18.0版本WinSW自动安装与管理指南
- Java Swing和JDBC实现的ATM系统源码解析
- 掌握Spark Streaming与Maven集成的分布式大数据处理
- 深入学习推荐系统:教程、案例与项目实践
- Web开发者必备的取色工具软件介绍
- C语言实现李春葆数据结构实验程序
- 超市管理系统开发:asp+SQL Server 2005实战
- Redis伪集群搭建教程与实践
- 掌握网络活动细节:Wireshark v3.6.3网络嗅探工具详解
- 全面掌握美赛:建模、分析与编程实现教程
- Java图书馆系统完整项目源码及SQL文件解析
- PCtoLCD2002软件:高效图片和字符取模转换
- Java开发的体育赛事在线购票系统源码分析
