
P. Ray/Engineering Science and Technology
,
an International Journal 20
(
2017
)
598
601
X
r
nt
相量测量单元,并具有
4 ms
的采样频率。从
PMU
获得的信号包括两
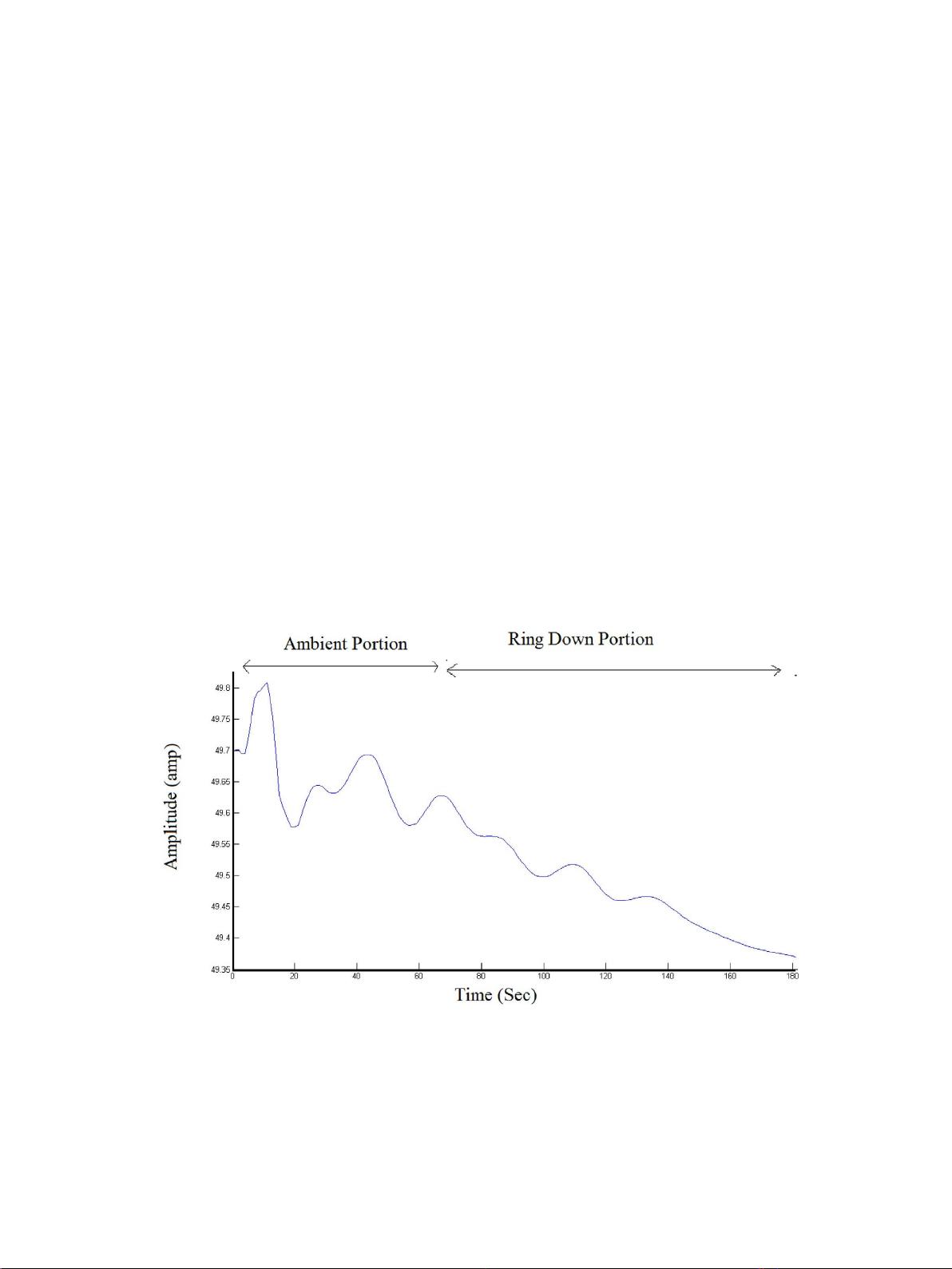
个区域,即,环境区,这是表示干扰前的区域和衰减的振铃区的信
号,这是表示故障后的条件下,在电力系统网络中占主导地位本文
对振铃部分进行了分析。图图
2-
5示出了在四个站点处收集的信号的图,
即,分别是文迪亚恰尔、达德里、坎普尔和莫加图2-5中的
信号有环境
信号和振铃部分。由于衰荡部分提供了丰富的低频振荡模式信息,
因此本文考虑对其进行进一步分析。 图图
6 -9
分别显示了文迪恰尔、
达德里、坎普尔和莫加的振铃部分。
PMU
采集信号的预处理通过去趋
势来完成。从信号中去除趋势的统计操作称为去趋势。
3.
基于信号处理的低频模式估计方法
3.1.
傅里叶变换
傅立 叶变 换将 函数 或信 号分 解为 以正 弦和 余弦 为特 征的 版本
[21]
,并提供了筛选任何函数的唯一方法
-
作为简单正弦曲线的总
和。分析离散傅立叶
变换(DFT)的算法是快速傅立叶变换(FFT)
[22,23]。时间
(或空间)到频率(反之亦然)的转换是通过傅立叶
分析完成的,
FFT
通过分解
DFT
矩阵
[21]
将这种转换快速分析为稀疏(大
部分为零)因子的乘积。
FFT
以递归方式将任意复合大小
N=N
1
N
2
的
离散傅里叶变换(
DFT
)重新表示为大小
为
N
1
和
N
2
的较小
DFT
,以
便将高度复合
N
(平滑数)的估计时间最小化为
O
(
NlogN
)
[21]
。最
常用的
FFT
类型是基
2
时间抽取(
DIT
)
[22]
。大小为
N
的
DFT
通过
每个递归级的基数
-2DIT
被划分为大小为
N /2
的两个交织
DFT
(因此
称为
Radix-2DIT
首先计算偶数索引输入
x
2
m
=
(
x
0
,
x
2
,. . ,
xN
-2
)和
奇数索引的输入
x2
m
+1
=
(
x1
,
x
3
,.. . ,
x
N
-1
),然后将这两个结果合并以创建总和
DFT
系列
[22]
。这个想法可以严格地计算出来,以使总运行时间最小
化为
O
(
NlogN
)
[22]
。此外,
DFT
的简化形式假设
N
是
2
的幂,因为
采样点的数量
N
通常可以由应用
[22]
自由选择。
FFT
快速,对噪声不
敏感,易于应用
[23
,
24]
。
3.2.
Prony
方法
傅立叶分析的扩展是Prony分析,它检查信号以找到信号中的频率,
阻尼系数和相关数据[25]。Prony方法用于从采样数据建模中给出指数
的线性组合,其行为类似于最小二乘线性预测算法,适用于AR(自回
归)和ARMA(自回归滑动平均)参数检测。此外,Prony分析是一种
技术, 将指数项的线性组拟合到下面的(1)中所示的信号。
N-1
Y
K
¼ A
n
e cosmos 2p f
n
t h
n
1
n
¼
0
哪里
A
n
=第n个模式
r
n
=
第
n
个模式的阻尼因子
f
n
=
第
n
个模式的频率
h
n
=
第
n
个模式
n = 1,2,3,. . 、
具有不同频率的每个指数项被视为原始信号
y
(
t
)的独特模式可
以从均匀采样数据记录的状态空间表示中找到如(
1
)中的每个模式
的四项原始信号的
Prony
分析是在
Prony
工具箱的帮助下进行的,
Prony
工具箱是编程的图形用户界面,其接受输入作为原始信号并评
估输入信号的
Prony
近似与近似值相关的关于模型阶数和模型参数值
的合理选择
图三
. Vindyachal
车站的原始信号。
剩余17页未读,继续阅读

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- AirKiss技术详解:无线传递信息与智能家居连接
- Hibernate主键生成策略详解
- 操作系统实验:位示图法管理磁盘空闲空间
- JSON详解:数据交换的主流格式
- Win7安装Ubuntu双系统详细指南
- FPGA内部结构与工作原理探索
- 信用评分模型解析:WOE、IV与ROC
- 使用LVS+Keepalived构建高可用负载均衡集群
- 微信小程序驱动餐饮与服装业创新转型:便捷管理与低成本优势
- 机器学习入门指南:从基础到进阶
- 解决Win7 IIS配置错误500.22与0x80070032
- SQL-DFS:优化HDFS小文件存储的解决方案
- Hadoop、Hbase、Spark环境部署与主机配置详解
- Kisso:加密会话Cookie实现的单点登录SSO
- OpenCV读取与拼接多幅图像教程
- QT实战:轻松生成与解析JSON数据
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


