汇川机器人编程指令详解与数据类型指南
需积分: 3 88 浏览量
更新于2024-06-17
收藏 2.16MB PDF 举报
汇川机器人编程指令手册是一份详细指导汇川机器人操作的文档,它专注于解析机器人的编程指令及其使用方法。这份手册对于想要深入学习和掌握汇川机器人应用编程的用户来说具有极高的实用价值。它详细介绍了自定义变量的管理,包括变量命名规则(必须以字母开头,不超过32个字符,包含字母、数字和下划线),以及变量的分类——全局变量、模块变量和局部变量,它们分别适用于不同的作用域。
在变量的数据类型方面,文档列举了数值变量如BOOL(布尔型)、BYTE(字节型)、INT(整型)、FLOAT(浮点型)和DOUBLE(双精度浮点型),以及它们的宽度、值范围和下标范围。例如,BOOL类型占用1字节,值域为TRUE和FALSE,而INT类型可以表示更大范围的数值。字符串变量STR和String则用于存储文本信息,字符长度有限制。位置变量P和LP以及平移变量PR/LPR也有所解释,它们代表空间坐标和运动相关的数据。
值得注意的是,不同类型的变量之间的赋值会进行强制转换,比如将一个较大的数值赋给较小类型的变量,可能会导致溢出或截断。此外,系统变量BRDLBLRLD的赋值会有值范围检查,一旦超出范围,将触发报警,但在作为函数参数传递时,会进行强制转换处理。
整个文档不仅提供了理论知识,还通过示例说明帮助读者理解如何在实际编程中运用这些指令。无论是初学者还是经验丰富的开发者,都能从中找到所需的信息,提升对汇川机器人的编程技能。因此,这本指令手册是学习和优化汇川机器人编程不可或缺的参考资料。

然后在用户坐标系下示教取点编程:
Movj P[1],V[30],Z[0];
Movl P[2],V[30],Z[3];
Movl P[3],V[30],Z[3];
……
Movj P[1],V[30],Z[0],User[1];
Movl P[2],V[30],Z[3],User[1];
Movl P[3],V[30],Z[3],User[1];
……
也可以
后来,工作台的摆放位置变了,在新工作台上建立 User2。那么可以直接更改:
MovjP[1],V[30],Z[0],User[2];
MovlP[2],V[30],Z[3],User[2];
MovlP[3],V[30],Z[3],User[2];
注意:P 的坐标系号为 1、2、3 时,不能切换 User。
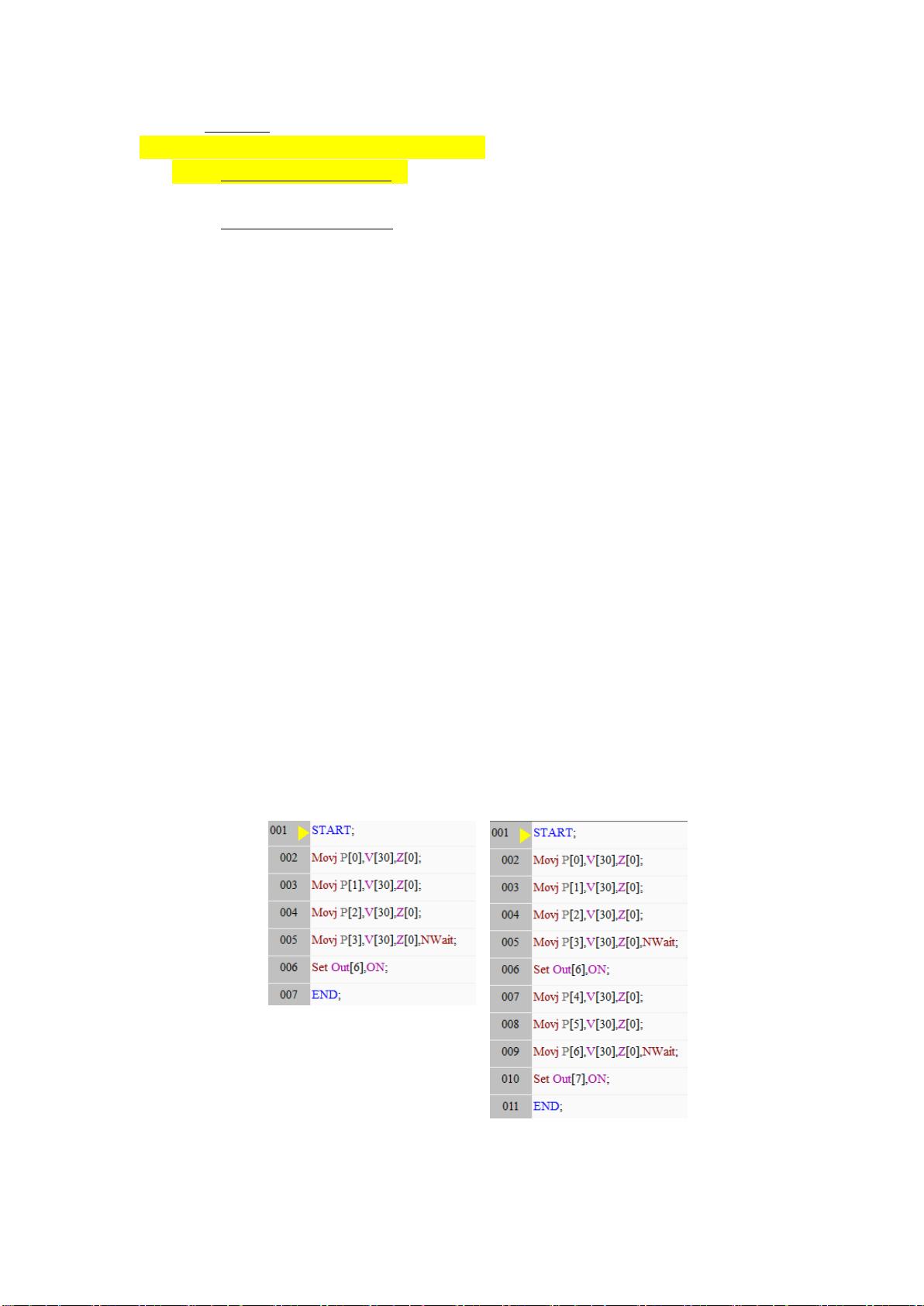
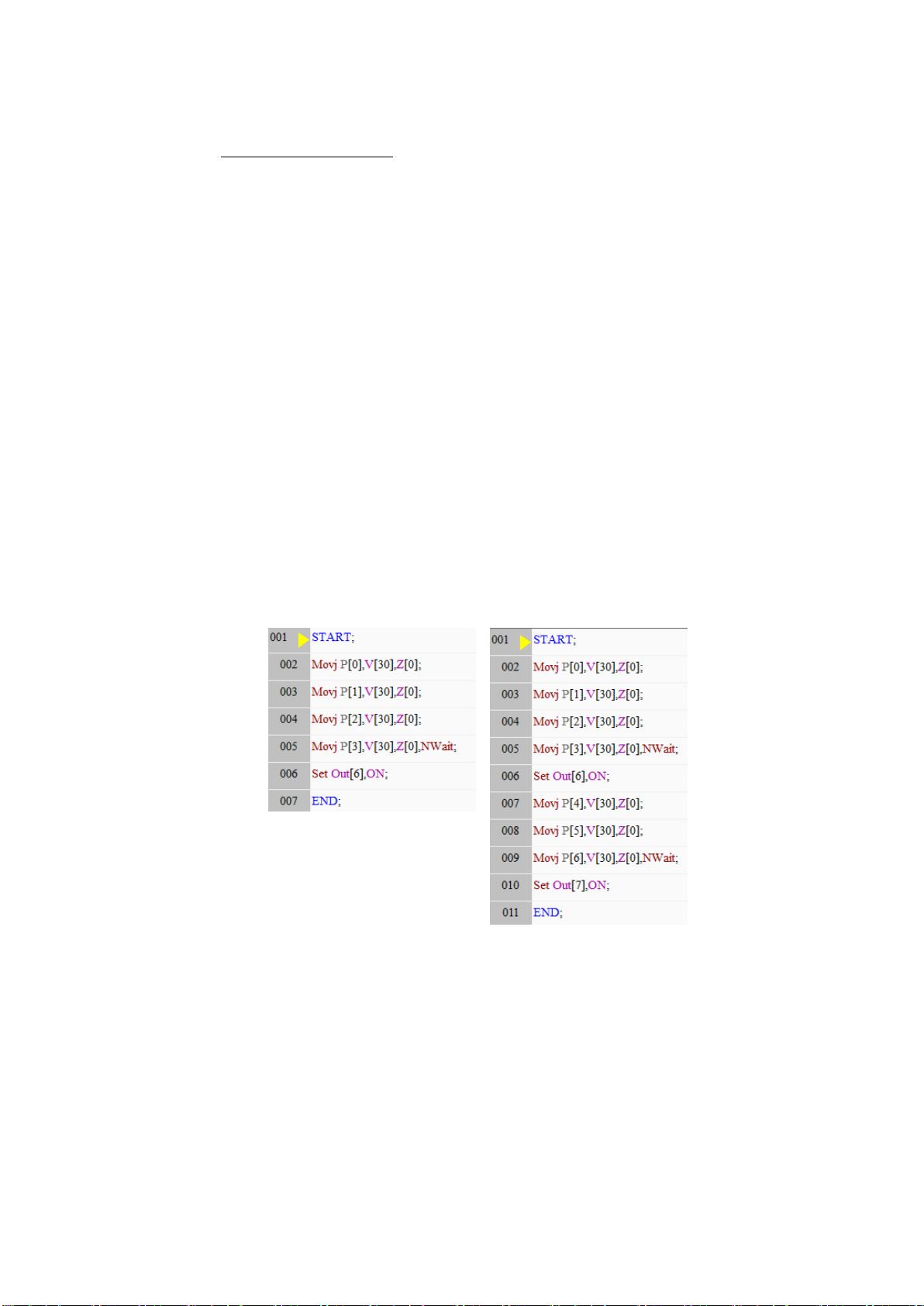
关于重复点的规格:
(1)相邻两点的关节角度差都小于 1e-5 弧度,视为重复点
(2)当视为重复点位,程序中的第二条运动指令无效,包含其中的运动附属参数,如
运动 IO 等。
3.2 Movl
功能:直线插补
描述:用于线性的移动到给定目标位置。
格式:Movl P, V, Z, Tool, [User], [Acc], [Dec], [NWait], [Until In == value], [Out(No,value,Type)…];
参数:
P:要达到的目标点
常见形式:P[1],LP[1]等。也可为偏移形式和托盘取点形式。
偏移形式——OffsetJ(P , PR)、OffsetT(P , PR)、Offset(P , PR) 、Offset(P , X,Y…)等。
特别的,Offset 中可使用 PE,表示从当前位置偏移。
需要注意带偏移形式对其后的[User], [Tool]参数有一定要求。
更多见关于偏移“Offset”的使用。
托盘取点形式——Pallet(PalletNo, Row, Colunm, Lay)、LPallet(PalletNo, Row, Colunm, Lay)。
根据托盘号、行号、列号、层号这些信息取托盘上的点,详见 2.6.7 节 Pallet 指令。
V:指定速度。如 V[50]代表 50%最大速度。
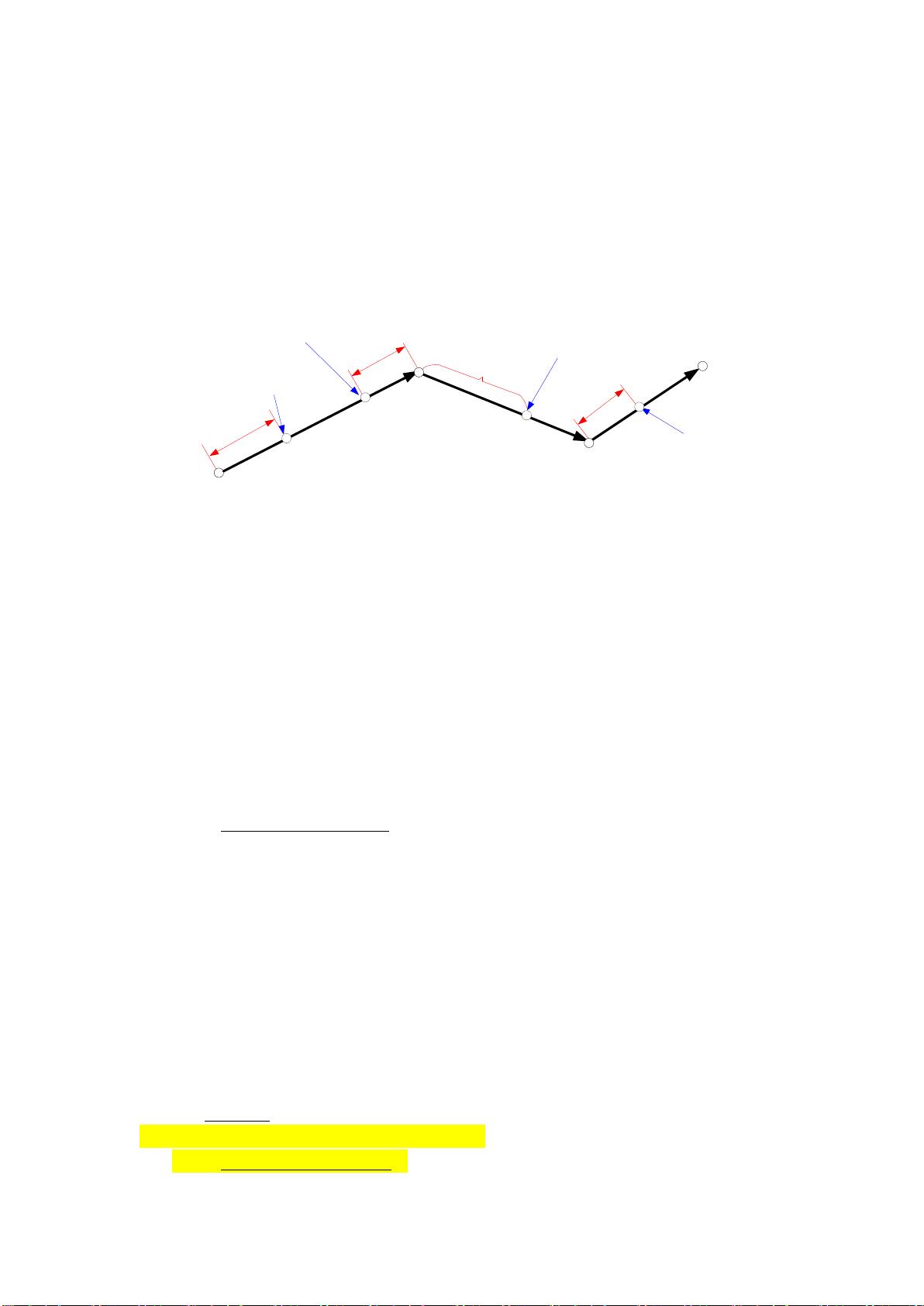
Z:到位与过渡参数。描述接近目标点和离开目标点过程中的过渡方式。
Fine:代表精确到位。机器人进入并停留在设定的到位误差范围内时,被算作精确到位,然
后再执行后面的运动。
Z[0]~Z[5]: 机器人不在目标点停留,而是平滑的通过设定的过渡区域,需要说明的是即使
Z[0]也不能保证机器人精确到达目标点。
Z[CP]:机器人不在目标点停留,以最大过渡长度过渡,平滑的通过设定的过渡区域。
剩余118页未读,继续阅读
3029 浏览量
1986 浏览量
1035 浏览量
点击了解资源详情
667 浏览量
点击了解资源详情

joy315912
- 粉丝: 1
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 微信小程序-点餐
- ionicStudyWithTabs:带有 ngCordova 的离子模板项目
- note-taker
- XIANDUAN.rar
- 一种基于高通量测序的拷贝数变异检测自动化分析解读及报告系统.rar
- rasaxproject1
- GitHub Open All Notifications-crx插件
- gatsby-remark-component-images:一个Gatsby注释插件,将gatsby-plugin-sharp处理应用于html样式的markdown标签
- 易语言开关音频服务实现开关声音-易语言
- ComposeKmmMoviesApp
- HistogramComponentDemo.7z
- UA GPU-able Search-crx插件
- MYSQL数据库管理器(易语言2005年大赛三等奖)2010-10-27.rar
- native-api-notification-[removed]JavaScript中的本机通知API
- 将超像素作为输入MATLAB代码-laplacianseg:种子图像分割的拉普拉斯坐标
- MyDroid
