
JOURNAL OF L
A
T
E
X CLASS FILES, VOL. X, NO. X, JANUARY 20XX 3
The four SLAM components are ‘camera pose es-
timation’, ‘map building’, ‘point classification’, and
‘camera grouping’. The main pipeline of our sys-
tem follows conventional sequential structure-from-
motion (SFM) methods. We assume that all cameras
look at the same initial scene to initialize the system.
After that, the ‘camera pose estimation’ component
computes camera poses at every frame by registering
the 3D map points to 2D image features. From time
to time, new map points are generated by the ‘map
building’ component. At every frame, points are clas-
sified into different types by the ‘point classification’
component. The system maintains the view overlap
information among cameras throughout time. The
‘camera grouping’ component separates cameras into
different groups, where cameras with view overlap
are in the same group. These groups could merge and
split when cameras meet or separate. In the following
section, we shall describe these four components in
detail.
4 CAMERA POSE ESTIMATION
Our system alternatively uses two different methods
for camera pose estimation: intra-camera pose esti-
mation and inter-camera pose estimation. In the for-
mer, each camera works independently, where tracked
feature points from a camera are registered with
static map points to compute its pose. In dynamic
environments, the number of static map points could
be small, or the static points are distributed within a
small image region, which can make the intra-camera
pose estimation fail. In such a case, we switch to the
inter-camera pose estimation method that uses both
static and dynamic points to simultaneously obtain
poses for all cameras.
4.1 Intra-camera Pose Estimation
If the camera intrinsic parameters are known, the cam-
era pose Θ = (R, t) can be computed by minimizing
the reprojection error (the distance between the image
projection of 3D map points and their corresponding
image feature points), namely,
Θ
∗
= arg min
θ
X
i
ρ (||m
i
− P(M
i
, Θ)||) . (1)
where P(M
i
, Θ) is the image projection of the 3D
point M
i
, m
i
is the image feature point registered to
M
i
, || · || measures the distance between two image
points. i is an index of feature points. The M-estimator
ρ : R
+
→ R
+
is the Tukey bi-weight function [39]
defined as
ρ(x) =
½
t
2
/6 (1 − [1 − (
x
t
)
2
]
3
) if |x| ≤ t
t
2
/6 otherwise.
(2)
Assuming that the error of feature detection and
tracking obeys a Gaussian distribution N (0, σ
2
I), we
set the threshold t in ρ(·) as 3σ. Equation (1) is
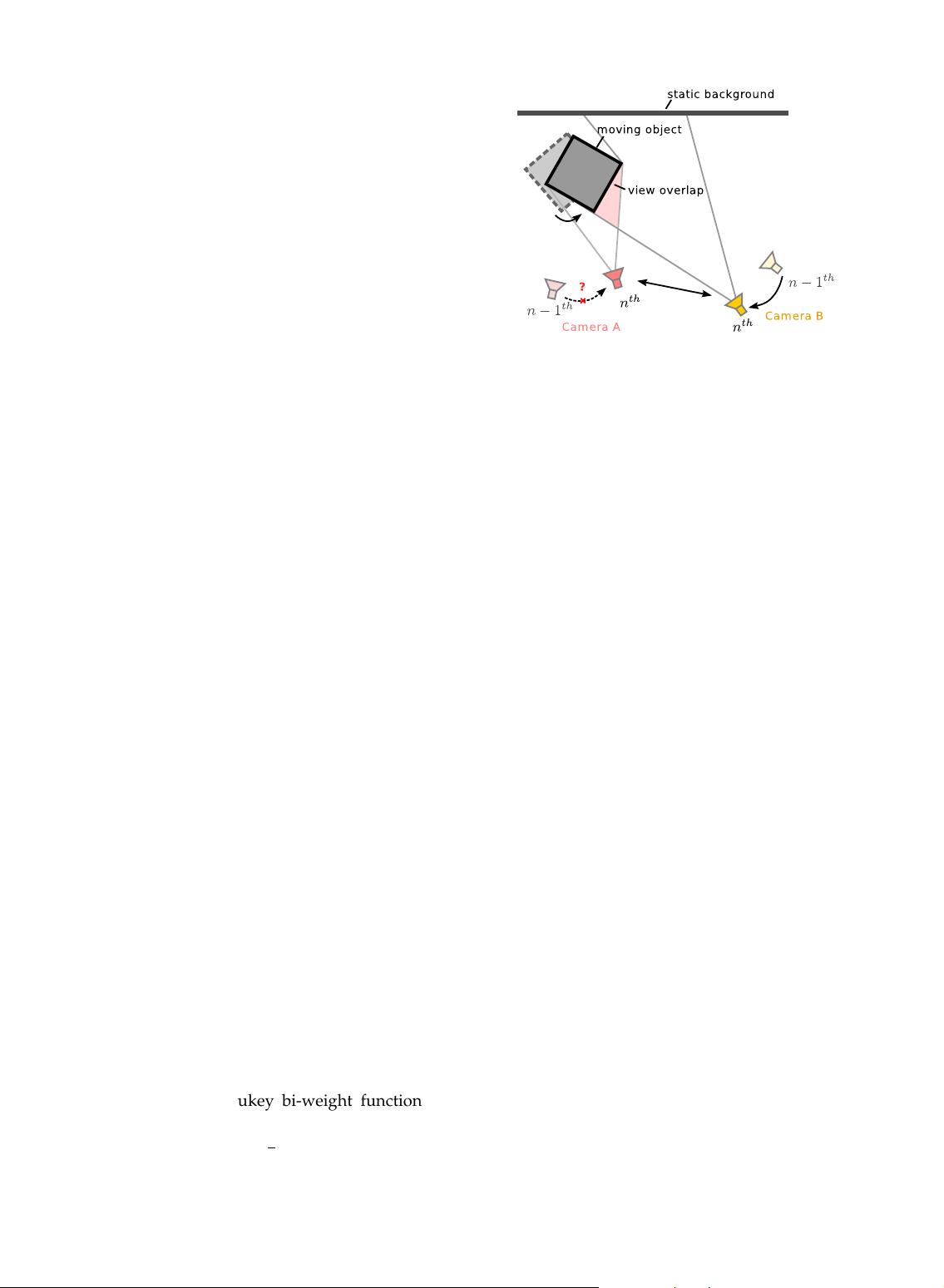
Fig. 2. The pose of camera A at the n
th
frame cannot
be estimated from its previous pose, since it observes
only the moving object (the grey square). However,
its relative pose with respect to camera B can be
determined. So the absolute pose of camera A can be
computed.
minimized by the iteratively re-weighted least squares
(IRLS) method, where Θ is initialized according to the
camera pose at the previous frame. At each iteration of
the IRLS, the Levenberg-Marquart algorithm is used
to solve the non-linear least square problem, where Θ
is parameterized in Lie algebra se(3) as [32].
4.2 Inter-camera Pose Estimation
When the number of visible static points is small,
or the static points are located in a small image
region, the intra-camera pose estimation is unstable
and sometimes fails. Fortunately, points on moving
objects give information about the relative camera
poses. Figure 2 provides such an illustration. The pose
of camera A at the n
th
frame cannot be decided on
its own, since it only observes the moving object (the
grey square). However, its relative pose with respect
to the camera B can be decided. We can therefore use
both static and dynamic points together to decide all
camera poses simultaneously.
Actually, the 3D coordinates of dynamic points can
only be computed when the camera poses are already
known. Hence, our system in fact simultaneously es-
timates both the camera poses and the 3D positions of
dynamic points. We formulate the inter-camera pose
estimation problem as an minimization of reprojection
error,
{Θ
c
}
∗
= arg min
M
D
,{Θ
c
}
X
c
½
X
i∈S
v
c
i
ρ (||m
i
− P(M
i
, Θ
c
)||)
+
X
j∈D
v
c
j
ρ (||m
j
− P(M
j
, Θ
c
)||)
¾
.
(3)
Here, c is an index of cameras, S and D are the set of
‘static’ and ‘dynamic’ map points. v
c
i
represents the
剩余14页未读,继续阅读


donghanruchen
- 粉丝: 0
- 资源: 37
 我的内容管理
展开
我的内容管理
展开







最新资源
- zlib-1.2.12压缩包解析与技术要点
- 微信小程序滑动选项卡源码模版发布
- Unity虚拟人物唇同步插件Oculus Lipsync介绍
- Nginx 1.18.0版本WinSW自动安装与管理指南
- Java Swing和JDBC实现的ATM系统源码解析
- 掌握Spark Streaming与Maven集成的分布式大数据处理
- 深入学习推荐系统:教程、案例与项目实践
- Web开发者必备的取色工具软件介绍
- C语言实现李春葆数据结构实验程序
- 超市管理系统开发:asp+SQL Server 2005实战
- Redis伪集群搭建教程与实践
- 掌握网络活动细节:Wireshark v3.6.3网络嗅探工具详解
- 全面掌握美赛:建模、分析与编程实现教程
- Java图书馆系统完整项目源码及SQL文件解析
- PCtoLCD2002软件:高效图片和字符取模转换
- Java开发的体育赛事在线购票系统源码分析
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


