nuScenes自动驾驶数据集详解
需积分: 17 183 浏览量
更新于2024-08-05
1
收藏 56.33MB PPTX 举报
“自动驾驶nuscenes数据集”是一个广泛用于自动驾驶研究和开发的数据集,由NuTonomy公司创建。该数据集提供了丰富的多传感器数据,包括摄像头、激光雷达(LiDAR)和雷达,旨在促进自动驾驶系统在复杂环境中的感知、定位和预测能力的提升。
nuscenes数据集的特点:
1. **多模态传感器数据**:nuscenes包含了来自6个不同视角的摄像头图像,这些图像提供了全方位的视觉信息。同时,它还提供了激光雷达(LiDAR)数据,用于精确的3D点云感知,以及雷达数据,帮助捕捉远距离和恶劣天气下的目标。
2. **点云标注**:数据集中有两种类型的点云标注,即panoptic和lidarseg。panoptic标注是对整个场景的全景理解,而lidarseg则是对点云的语义分割,将点云划分为不同的类别,如车辆、行人、建筑物等。
3. **预测挑战**:nuscenes数据集与《https://arxiv.org/pdf/1911.10298.pdf》中提到的预测挑战相关,该挑战鼓励开发者预测未来一段时间内场景中物体的行为和位置,这对于自动驾驶汽车的安全决策至关重要。
4. **CAN总线扩展**:数据集还包括了CAN总线数据,提供了关于车辆路线、IMU(惯性测量单元)信息、车辆姿态、转向角反馈和电池状态等,这些都是自动驾驶系统理解和控制车辆的关键信息。
5. **详细地图信息**:nuscenes数据集的地图扩展部分包含11种语义层,如人行横道、人行道、交通信号灯等,这些信息对于精确的定位和路径规划至关重要。地图数据以点、线和面的形式存储,记录了驾驶区域、车道、交通标志等多个元素。
6. **nuscenes-devkit工具**:为了方便数据的查看和处理,nuscenes提供了名为nuScenes-devkit的工具包。这个工具集包含了用于查看和操作数据的各种接口,如geometric_layers(用于几何形状,如多边形、线和节点)和non_geometric_layers(如可行驶区域、道路段、路障、车道、人行横道、步行道、停车线和停车场等)。
7. **覆盖地区**:nuscenes数据集采集自四个不同的地理位置:波士顿海港、新加坡的一北区、荷兰村和皇后镇。这些地区的多样性有助于测试自动驾驶系统的通用性和适应性。
通过这个详尽的数据集,研究人员和工程师能够训练和评估自动驾驶算法,尤其是在城市环境中应对复杂的交通状况和动态。nuscenes-devkit提供的工具使得数据处理更加便捷,有助于快速推进自动驾驶技术的发展。
h ttps:/ /g i t h u b .c o m / n u t o n o m y/ nu s c e n e s -d e v k i t
nuscenes 数据集
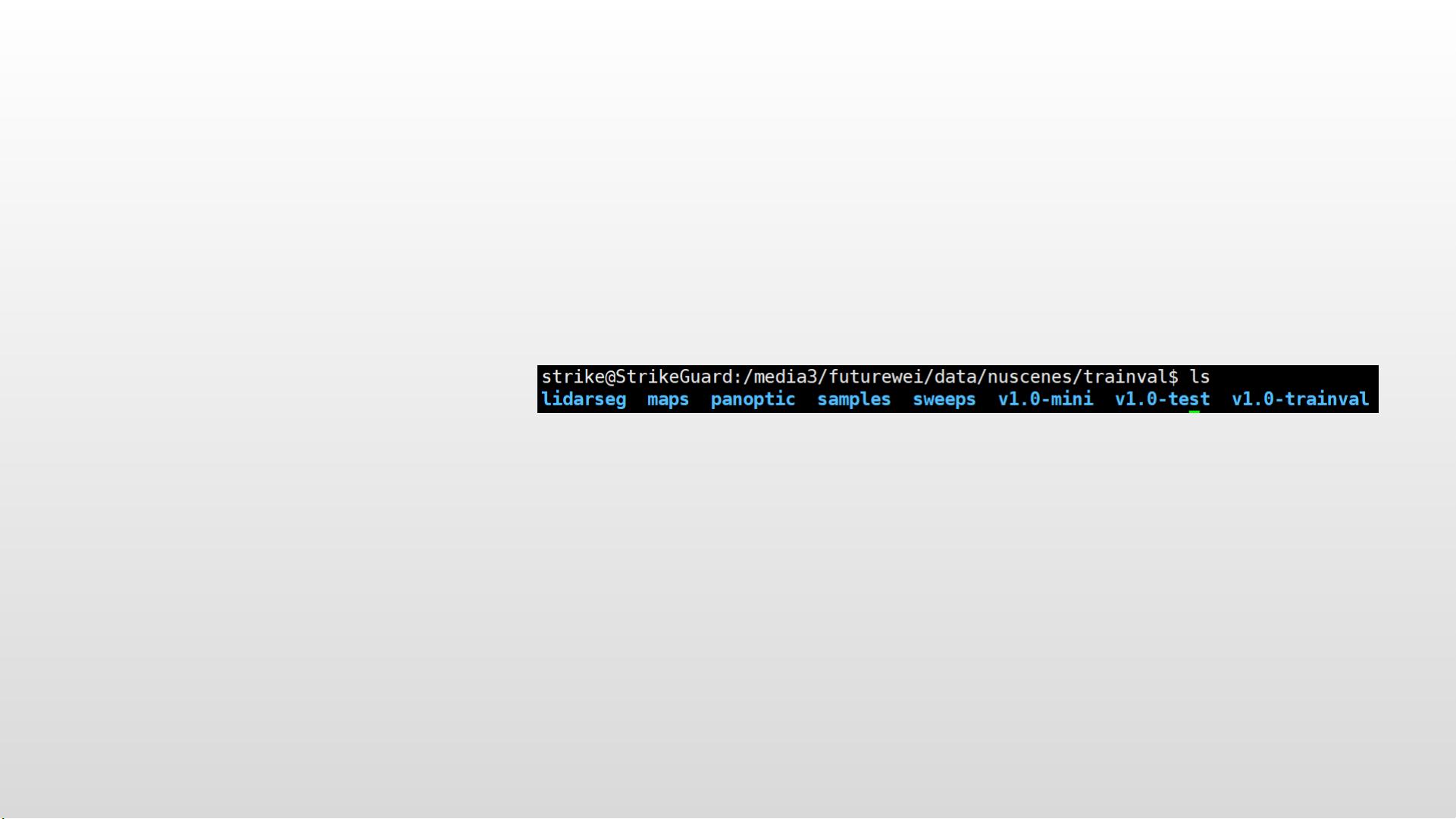
nuScenes 数据集目录
官网
github
Panoptic nuScenes panoptic labels of the point clouds 点云全景
nuScenes-lidarseg semantic labels of the point clouds 点云语义
Prediction challenge 《https://arxiv.org/pdf/1911.10298.pdf 》https://arxiv.org/pdf/1911.10298.pdf
CAN bus expansion vehicle data about the vehicle route, IMU, pose, steering angle feedback,
battery 机动车
Map expansion map expansion with 11 semantic layers (crosswalk, sidewalk, traffic lights,
etc.) 地图
样本包含6 个摄像头图片数据,激光雷达和雷达数据
nuScenes 数据集包含四部分
https://www.nuscenes.org/
下载后可阅读完整内容,剩余6页未读,立即下载
2021-04-28 上传
2022-04-20 上传
2023-07-27 上传
2023-05-26 上传
2023-04-05 上传
2023-09-06 上传
2023-04-05 上传
2023-04-21 上传

weixin_40833881
- 粉丝: 7
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java毕业设计项目:校园二手交易网站开发指南
- Blaseball Plus插件开发与构建教程
- Deno Express:模仿Node.js Express的Deno Web服务器解决方案
- coc-snippets: 强化coc.nvim代码片段体验
- Java面向对象编程语言特性解析与学生信息管理系统开发
- 掌握Java实现硬盘链接技术:LinkDisks深度解析
- 基于Springboot和Vue的Java网盘系统开发
- jMonkeyEngine3 SDK:Netbeans集成的3D应用开发利器
- Python家庭作业指南与实践技巧
- Java企业级Web项目实践指南
- Eureka注册中心与Go客户端使用指南
- TsinghuaNet客户端:跨平台校园网联网解决方案
- 掌握lazycsv:C++中高效解析CSV文件的单头库
- FSDAF遥感影像时空融合python实现教程
- Envato Markets分析工具扩展:监控销售与评论
- Kotlin实现NumPy绑定:提升数组数据处理性能
