Ubuntu下QGC解析APM飞控自定义MAVLink消息教程
105 浏览量
更新于2024-08-31
2
收藏 2.26MB PDF 举报
"这篇教程介绍了如何在Ubuntu环境下,使用QGroundControl(QGC)解析APM飞控新定义的MAVLink消息。作者通过在飞控中添加自定义的MAVLink包,实现遥控和MAVLink摇杆切换状态显示,并在QGC中进行解析。"
在APM飞控中添加自定义MAVLink消息的过程涉及到以下几个关键知识点:
1. **MAVLink协议**:
MAVLink是一种轻量级的通信协议,广泛用于无人机和地面站之间的通信。它定义了一套标准的消息结构,包括消息ID、数据字段和CRC校验等。自定义MAVLink消息是为了满足特定需求,不在标准消息集内的通信需求。
2. **编辑`ardupilotmega.xml`**:
在飞控代码中,新增的自定义MAVLink消息需要在`ardupilotmega.xml`文件中定义。在这个例子中,由于223号消息ID未被使用,因此被选择用于新的自定义消息。
3. **发送自定义MAVLink消息**:
使用`mavlink_msg_mavlink_remote_ok_send()`函数发送自定义消息,其中`chan`参数表示通道,`ff`参数是消息的具体数据。在这个例子中,`ff`被赋值为2来发送消息。
4. **编译与调试**:
通过`sudo sim_vehicle.py`命令进行软件在环(SITL)仿真测试。在调试过程中,使用QGroundControl的`qDebug()`功能来检查消息是否正确发送。如果在SITL中无法发送自定义消息,可能需要在物理设备上测试,如文中提到的CubeBlack。
5. **QGroundControl接收与解析**:
要使QGC能够解析自定义的MAVLink消息,首先需要将生成的MAVLink头文件引入到QGC项目中。然后在`ardupilotmega.h`文件中定义消息ID,校验CRC和其他长度信息。最后,在`Vehicle::_mavlinkMessageReceived()`函数中添加对应的解码逻辑,以处理新的消息类型。
通过以上步骤,可以成功实现APM飞控和QGroundControl之间的自定义MAVLink消息传递和解析。这对于开发定制化的无人机控制功能或扩展现有的通信协议非常有用。这个过程不仅展示了MAVLink协议的灵活性,也体现了开源社区中开发者如何根据自身需求扩展和改进现有系统。
qgc 解析解析apm飞控新定义的飞控新定义的mavlink消息消息(ubuntu)
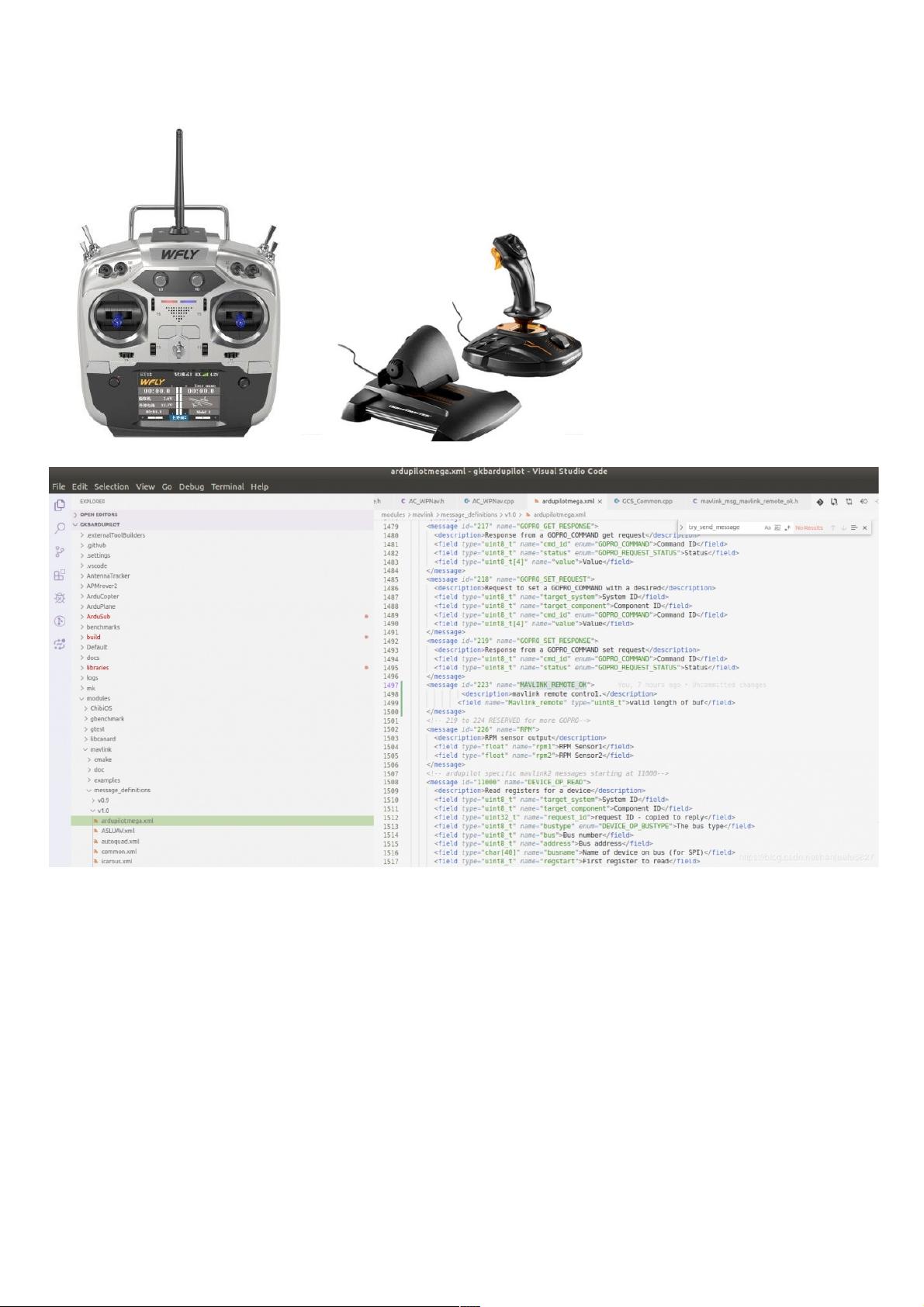
1. 飞控中添加一条自定义飞控中添加一条自定义mavlink包包
加一个遥控和mavlink摇杆切换状态显示,也就是远程操控时候下面两货的切换:
在VSCode中打开ArduCopter代码,打开子模块,如下编译器截图中操作即可:
由于223在ardupilotmega.xml中没用到,故用了:
mavlink remote contro1.
valid length of buf
用uint8_t ff=2; mavlink_msg_mavlink_remote_ok_send(chan,ff); 发送消息。
下载后可阅读完整内容,剩余5页未读,立即下载
2018-09-27 上传
2020-07-17 上传
2023-07-27 上传
2024-06-06 上传
2024-02-23 上传
2023-09-08 上传

weixin_38683895
- 粉丝: 6
- 资源: 899
 我的内容管理
展开
我的内容管理
展开







最新资源
- 【地产资料】XX地产 店长管理核心大纲P39.zip
- JavaEE7+Spring4 + hibernate5企业级数据校验
- ECOR1042-Project
- HTML5 Canvas星星笑脸动画.rar
- ant-pro-ui:桐乡市系统安全监管系统
- Excel模板材料存量计划表.zip
- 2014-2020年扬州大学353卫生综合考研真题
- LeapMotion-Foot-Gesture-Recognition:使用 LeapMotion 跟踪和学习基于脚的交互的库
- sample_app
- rust-spice:可在Rust上使用的NASANAIF Spice工具包
- appblog
- Time2Vec-PyTorch:复制纸张
- matlab-(含教程)基于FMM+Criminisi算法彩色图像修复matlab仿真
- Excel模板销售清单模板.zip
- 毕业设计&课设--毕业设计-销售管理系统.zip
- 参考-数值分析.zip
