张正友标定算法解读:从基本原理到实现细节
需积分: 9 197 浏览量
更新于2024-09-11
收藏 75KB DOCX 举报
张正友标定算法解读
张正友标定算法是计算机视觉领域中一个非常重要的算法,尤其是在相机标定方面。该算法的提出对后续的计算机视觉研究产生了深远的影响。下面我们将对张正友标定算法的核心原理进行详细的介绍。
一、基本问题描述
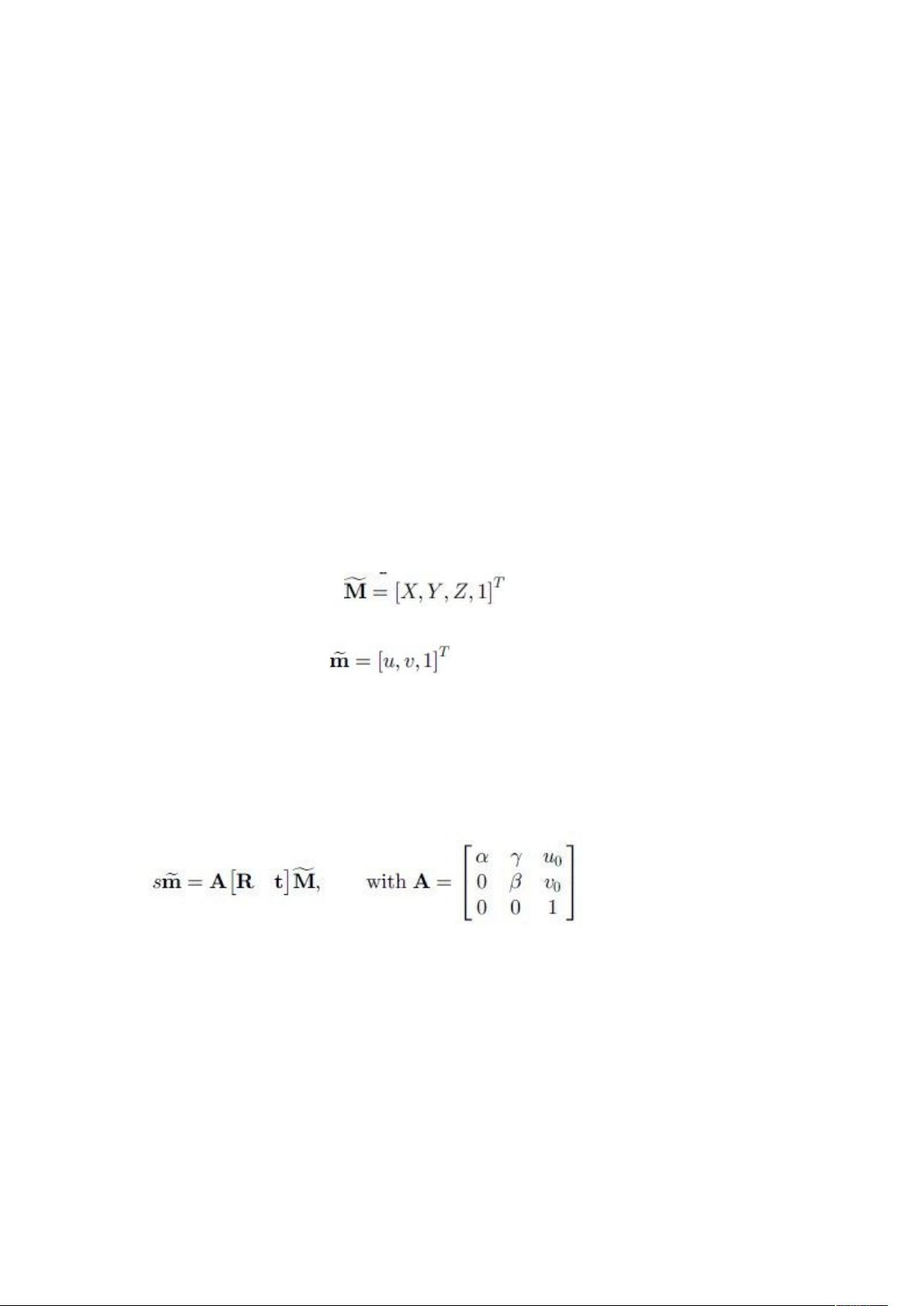
在计算机视觉中,一个基本的问题是如何将三维点映射到二维平面上。假设空间平面中有一个三维点(齐次坐标,世界坐标系),相机平面上有一个二维点(齐次坐标,相机坐标系)。那么,如何将空间中的点映射到相机平面上呢?我们可以使用一个等式来表示两者之间的关系:
(1)
其中,A是相机内参矩阵,R和t分别是旋转和平移矩阵,s是一个放缩因子标量。
二、等式简化
我们可以将等式(1)进一步简化:
(2)
由于张正友算法选取的是平面标定,所以我们可以令z=0,从而平移向量只有r1和r2两个分量。H就是我们常说的单应性矩阵,在这里描述的是空间中平面三维点和相机平面二维点之间的关系。
三、内参限制
我们可以将H矩阵(3*3)写成三个列向量形式,那么我们可以将H矩阵又写成:
(3)
其中,λ是一个放缩因子标量,也是s的倒数。
现在我们要用一个关键性的条件:r1和r2标准正交。我们可以得到两个等式:
(4)和(5)
这两个等式非常优美,因为它们完美地与绝对二次曲线理论联系起来了。
四、相机内参的求解
我们可以令:
(6)
我们可以知道B矩阵是一个对称矩阵,所以可以写成一个六维向量形式:
(7)
我们可以将H矩阵的列向量形式写成:
(8)
那么根据等式(8)我们可以将等式(4)改写成:
(9)
(10)
最后根据内参数限制条件(等式(4)和(5)):
(11)
即:
(12)
V矩阵是一个2*6矩阵,也就是说每张照片可以建立起两个方程组,六个未知数。根据线性代数知识可知,解六个未知数需要至少六个方程组,所以也就是说我们至少需要三张照片就可以求解未知数。b矩阵的解出,相机内参矩阵A也就求解出,从而每张图像的R、t也就根据等式(1)迎刃而解。
五、参数优化
因为初始的参数已经求解出,所以我们可以对参数进行优化。参数优化是计算机视觉中一个非常重要的步骤,因为它可以提高标定算法的精度和鲁棒性。
张正友标定算法是一个非常重要的算法,它对计算机视觉领域产生了深远的影响。该算法的提出使得相机标定变得更加方便和高效,从而推动了计算机视觉领域的发展。
张正友标定算法解读
一直以来想写篇相机标定方面的东西,最近组会上也要讲标定方面东西,
所以顺便写了。无论是 OpenCV 还是 matlab 标定箱,都是以张正友棋盘标定
算法为核心实现的,这篇 PAMI 的文章<<A Flexible New Technique for
Camera Calibration>>影响力极大,张正友是 zju 的机械系出身,貌似现在
是微软的终身教授了,有点牛的。我就简单的介绍下算法的核心原理,公式的
推理可能有点多。。。
一 基本问题描述:空间平面的三维点与相机平面二维点的映射
假设空间平面中三维点: (齐次坐标,世界坐标系)
相机平面二维点: (齐次坐标,相机坐标系)
那么空间中的点是如何映射到相机平面上去呢?我们用一个等式来表示两者之
间关系:
(1)
注:A 为相机内参矩阵,R,t 分别为旋转和平移矩阵,s 为一个放缩因子标量。
我们把等式(1)再简化下:
下载后可阅读完整内容,剩余3页未读,立即下载
2019-07-04 上传
2022-09-23 上传
2023-09-10 上传
2024-03-15 上传
2023-09-01 上传
2023-09-01 上传
2023-09-09 上传
2023-12-11 上传
2023-07-11 上传

豆豆200000
- 粉丝: 3
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Ansys Comsol实现力磁耦合仿真及其在电磁无损检测中的应用
- 西门子数控系统调试与配置实战案例教程
- ELM多输出拟合预测模型:简易Matlab实现指南
- 一维光子晶体的Comsol能带拓扑分析研究
- Borland-5技术资料压缩包分享
- Borland 6 技术资料分享包
- UE5压缩包处理技巧与D文件介绍
- 机器学习笔记:深入探讨中心极限定理
- ProE使用技巧及文件管理方法分享
- 增量式百度图片爬虫程序修复版发布
- Emlog屏蔽用户IP黑名单插件:自定义跳转与评论限制
- 安装Prometheus 2.2.1所需镜像及配置指南
- WinRARChan主题包:个性化你的压缩软件
- Neo4j关系数据映射转换测试样例集
- 安装heapster-grafana-amd64-v5-0-4所需镜像介绍
- DVB-C语言深度解析TS流
