Ceres曲线拟合与四元数参数化教程
需积分: 0 182 浏览量
更新于2024-08-05
收藏 1.28MB PDF 举报
"这篇资源包含了关于Ceres优化库的学习笔记,特别是针对第三章作业的代码和解析。内容涉及Ceres的曲线拟合功能以及如何处理旋转参数,尤其是四元数的自定义参数化。作者提到,由于Ceres的默认更新方式与SO3四元数的更新规则不同,因此需要对雅克比矩阵进行赋值。此外,资源还提到了自定义旋转参数块的重要性,以确保迭代更新时不破坏旋转约束。"
在Ceres优化库中,曲线拟合是一个关键应用,它允许我们找到一组参数,使得数据点与模型之间的残差最小。高翔的SLAM课程第14讲可能是学习Ceres入门的好资源。然而,当涉及到旋转表示时,如四元数或旋转矩阵,由于它们不支持普通的加法操作,必须采取特殊处理。
四元数是一种有效表示3D旋转的方法,具有四个独立的分量。在Ceres中,为了保持旋转矩阵的正交性(即保持旋转性质),需要自定义局部参数化(LocalParameterization)。这是因为Ceres的默认优化策略基于加减更新,这不适合四元数。为了适应四元数的更新规则,我们需要创建一个自定义的参数化子类,继承自Ceres的`LocalParameterization`基类。这个子类需要实现所有纯虚函数,以定义特定的更新规则。
`GlobalSize()`方法是`LocalParameterization`的一个重要组成部分,它返回参数向量的维度。例如,四元数参数化中,四元数有四个自由度,所以`GlobalSize()`将返回4。注意,虽然四元数在内存中的存储顺序可能与Eigen库中构造四元数的顺序不同,需要特别处理,以避免混淆。
`EigenQuaternionParameterization`和`QuaternionParameterization`是两种不同的四元数参数化实现。前者可能更直接地映射到Eigen库的四元数结构,而后者可能需要更具体的调整来匹配四元数的存储和计算。
此外,自定义参数化还可以用于对优化变量施加额外的限制,如在SLAM2Dexample中对角度范围的限制。通过这种方式,我们可以确保优化过程不会超出预设的范围,从而保证解的物理意义和有效性。
这篇资源提供了对Ceres优化库深入理解的起点,特别是对于处理旋转参数和自定义参数化需求的开发者来说,是非常有价值的参考资料。
CostFunction
定
义
重
点
参
考
博
客
:
Ceres
详
解
(
⼀
)
Problem
类
Ceres
详
解
(
⼆
)
CostFunction
2.
基
于
线
⾯
特
征
解
析
求
导
的
实
现
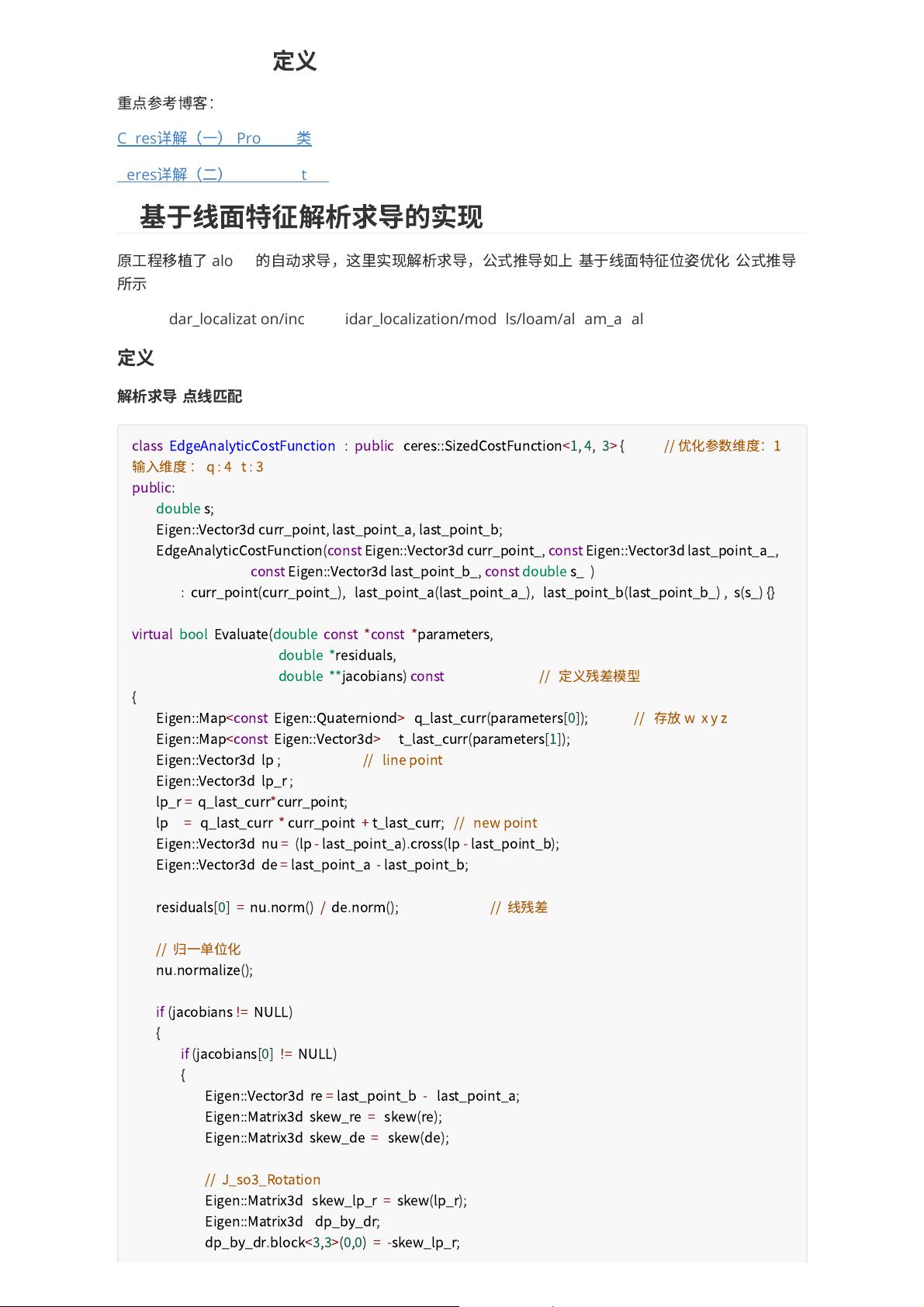
原
⼯
程移
植
了
aloam
的
⾃
动
求
导
,
这
⾥
实
现
解
析
求
导
,
公
式
推
导
如
上
“
基
于
线
⾯
特
征
位
姿
优
化
/
公
式
推
导
”
所
⽰
FILE: lidar_localization/include/lidar_localization/models/loam/aloam_analytic_factor.hpp
定
义
CostFunction
解
析
求
导
-
点
线
匹
配
CostFunction
class EdgeAnalyticCostFunction : public ceres::SizedCostFunction<1, 4, 3> { //
优
化
参
数
维
度
:
1
输
⼊
维
度
:
q : 4 t : 3
public:
double s;
Eigen::Vector
d curr_point, last_point_a, last_point_b;
EdgeAnalyticCostFunction(const Eigen::Vector
d curr_point_, const Eigen::Vector
d last_point_a_,
const Eigen::Vector
d last_point_b_, const double s_ )
: curr_point(curr_point_), last_point_a(last_point_a_), last_point_b(last_point_b_) , s(s_) {}
virtual bool Evaluate(double const *const *parameters,
double *residuals,
double **jacobians) const //
定
义
残
差
模
型
{
Eigen::Map<const Eigen::Quaterniond> q_last_curr(parameters[0]); //
存
放
w x y z
Eigen::Map<const Eigen::Vector
d> t_last_curr(parameters[1]);
Eigen::Vector
d lp ; // line point
Eigen::Vector
d lp_r ;
lp_r = q_last_curr*curr_point;
lp = q_last_curr * curr_point + t_last_curr; // new point
Eigen::Vector
d nu = (lp - last_point_a).cross(lp - last_point_b);
Eigen::Vector
d de = last_point_a - last_point_b;
residuals[0] = nu.norm() / de.norm(); //
线
残
差
//
归
⼀
单
位
化
nu.normalize();
if (jacobians != NULL)
{
if (jacobians[0] != NULL)
{
Eigen::Vector
d re = last_point_b - last_point_a;
Eigen::Matrix
d skew_re = skew(re);
Eigen::Matrix
d skew_de = skew(de);
// J_so
_Rotation
Eigen::Matrix
d skew_lp_r = skew(lp_r);
Eigen::Matrix
d dp_by_dr;
dp_by_dr.block<3,3>(0,0) = -skew_lp_r;
剩余13页未读,继续阅读
2021-04-12 上传
158 浏览量
2022-04-08 上传
2023-10-03 上传
2023-06-28 上传
2023-04-11 上传
2023-03-16 上传
2023-07-28 上传
2023-04-26 上传

df595420469
- 粉丝: 31
- 资源: 310
 我的内容管理
展开
我的内容管理
展开







最新资源
- 正整数数组验证库:确保值符合正整数规则
- 系统移植工具集:镜像、工具链及其他必备软件包
- 掌握JavaScript加密技术:客户端加密核心要点
- AWS环境下Java应用的构建与优化指南
- Grav插件动态调整上传图像大小提高性能
- InversifyJS示例应用:演示OOP与依赖注入
- Laravel与Workerman构建PHP WebSocket即时通讯解决方案
- 前端开发利器:SPRjs快速粘合JavaScript文件脚本
- Windows平台RNNoise演示及编译方法说明
- GitHub Action实现站点自动化部署到网格环境
- Delphi实现磁盘容量检测与柱状图展示
- 亲测可用的简易微信抽奖小程序源码分享
- 如何利用JD抢单助手提升秒杀成功率
- 快速部署WordPress:使用Docker和generator-docker-wordpress
- 探索多功能计算器:日志记录与数据转换能力
- WearableSensing: 使用Java连接Zephyr Bioharness数据到服务器
