智能汽车竞赛电磁组自平衡车控制技术解析
需积分: 46 68 浏览量
更新于2024-07-17
2
收藏 4.79MB PDF 举报
"自平衡车原理讲解"
自平衡车,也称为电动独轮车或智能平衡车,是一种依靠内置的陀螺仪和加速度计来维持自身平衡的交通工具。其核心技术在于平衡控制、速度控制和方向控制。这篇文档是第七届全国大学生"飞思卡尔"杯智能汽车竞赛电磁组直立行车的参考设计方案,详细介绍了自平衡车的工作原理和设计思路。
在自平衡车的原理篇中,首先将直立行走任务分解为平衡控制、速度控制和方向控制三个关键部分。平衡控制是通过实时监测和调整车模的角度和角速度,确保车模始终保持直立状态。速度控制则涉及车模的加速和减速,通常利用电机的转速来调整。方向控制则关乎车模的转向,通过对两侧电机的不同控制来实现。
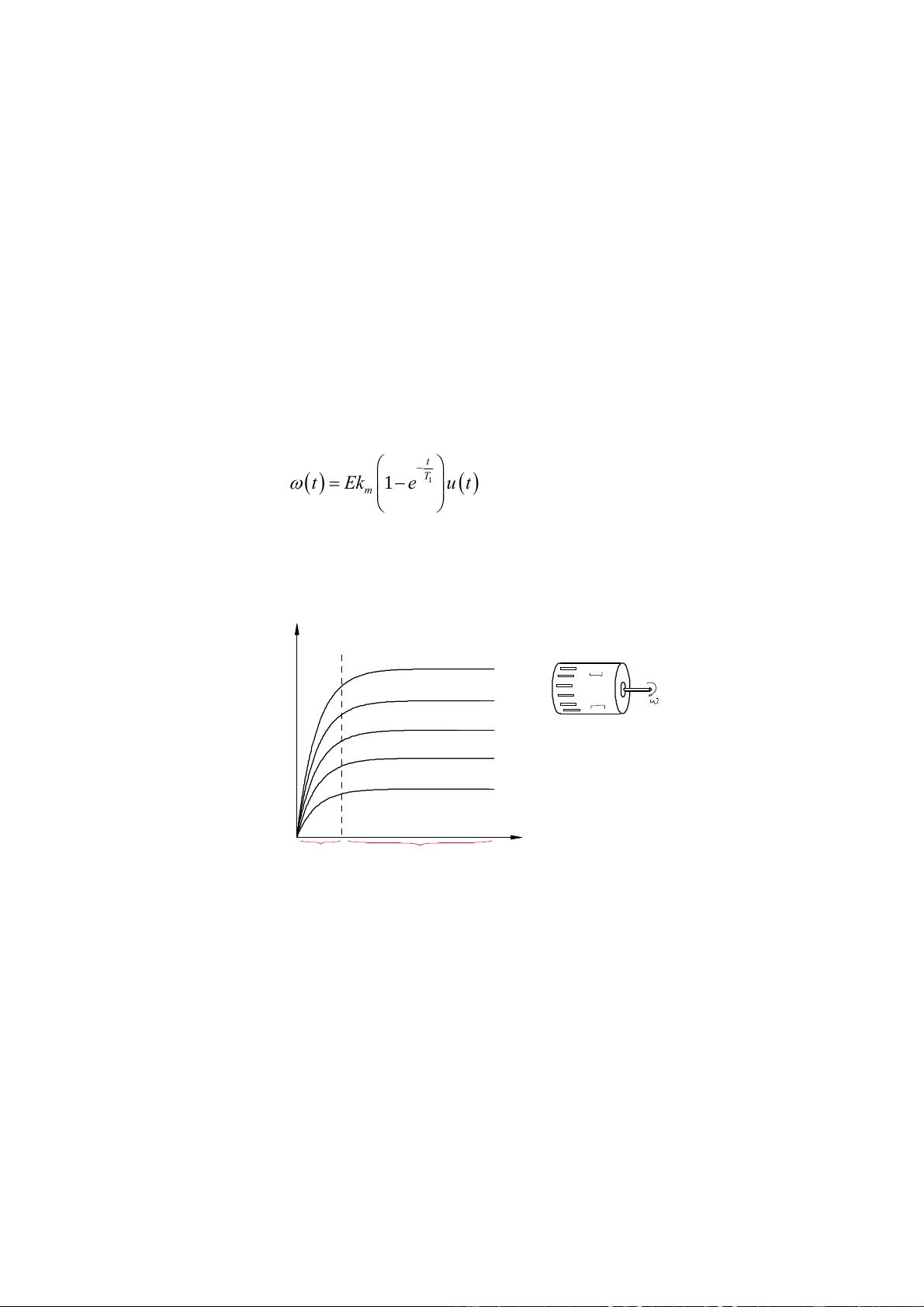
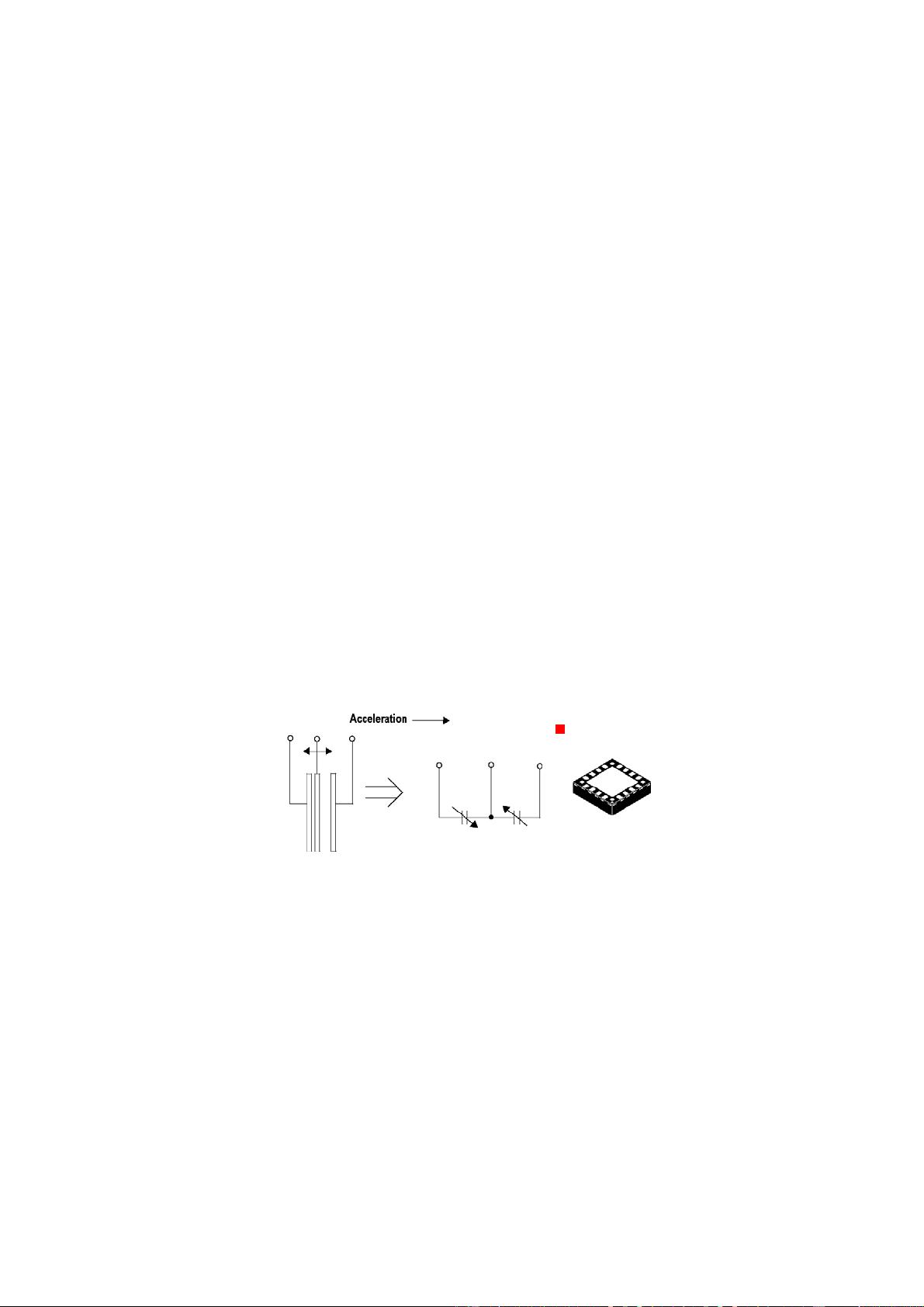
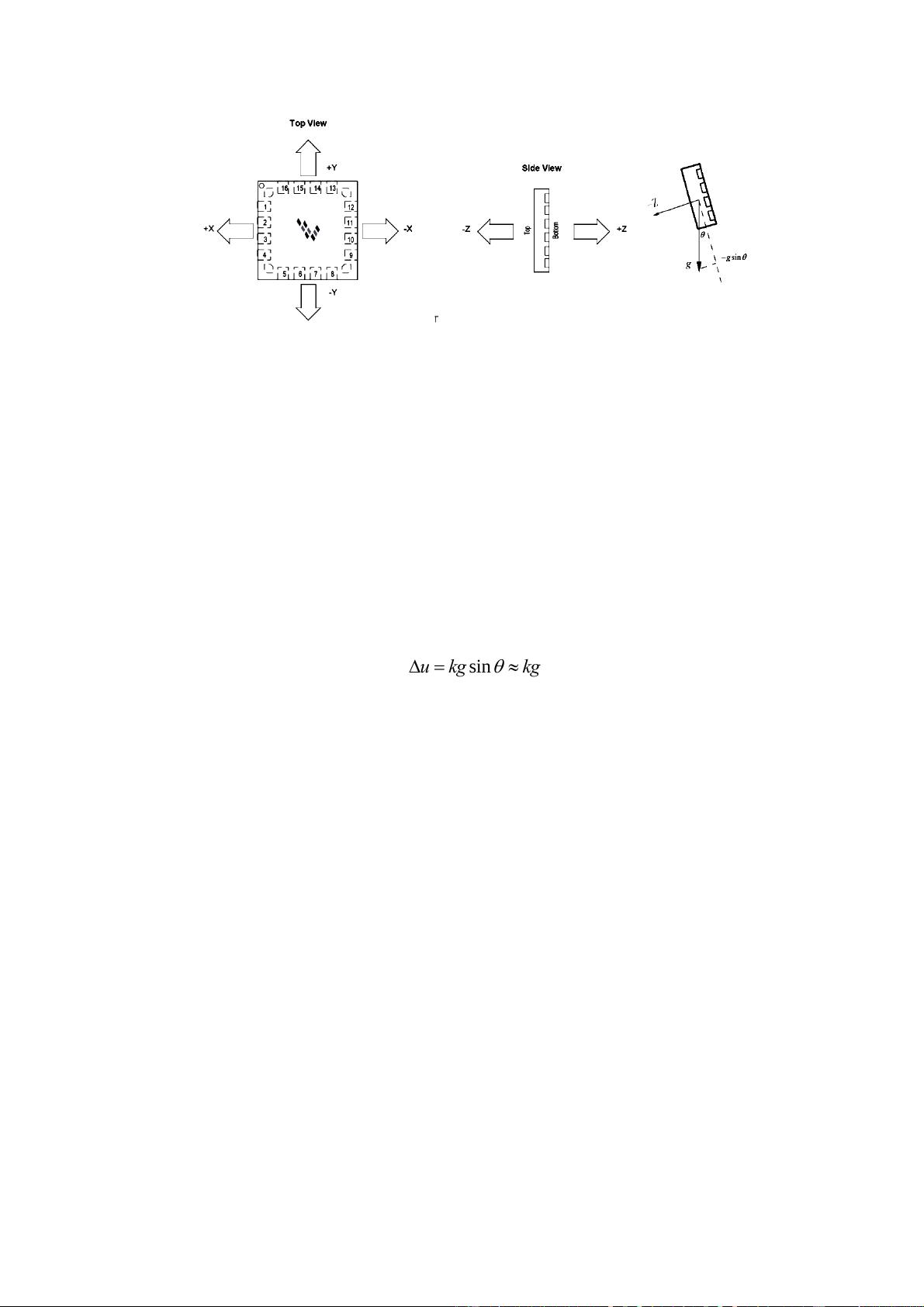
车模角度和角速度的测量是实现平衡控制的基础,这通常由加速度传感器和陀螺仪完成,例如MMA7260三轴加速度传感器。这些传感器能够检测到车模的微小运动和倾斜,提供实时数据反馈。车模的速度控制通过调节电机的电压来实现,电机的转速与电压成正比,从而改变车模的行进速度。
方向控制通常通过控制两侧电机的功率差来达成,当一侧电机加速而另一侧减速时,车模会向加速的一侧转弯。车模直立行走控制算法总图展示了整个控制系统的工作流程,包括数据采集、处理和反馈控制。
电路设计篇详细描述了自平衡车的各个关键电路,包括整体电路框图、单片机最小系统、倾角传感器、电机驱动电路、速度传感器、电磁线检测电路、角度计算电路以及车模控制电路全图。这些电路共同协作,确保车模能根据实时数据做出正确的反应。
机械设计篇讨论了车模的结构改造,如简化改装、传感器的安装位置以及需要注意的事项。软件开发篇涵盖了软件的功能框架、DSC的硬件资源配置以及主要算法的实现。
车模调试篇提供了详细的参数设置和调试方法,包括静态参数调试和动态参数调试,旨在优化车模性能和整体水平。
自平衡车的工作原理涉及复杂的传感器技术、电机控制和动态平衡算法。这份文档为理解自平衡车的设计和实现提供了深入的见解,对电子工程和机器人学领域的学习者极具参考价值。
k
1
k
2
适当的类比和想
象,可以使我们
更容易理解控制
原理。
图 2‐10 车模控制两个系数作用
在上面简单分析中,通过类比倒立摆得到了车模直立的控制方案。下面对倒立车模
进行简单数学建模,然后建立速度的比例微分负反馈控制,根据基本控制理论讨论车模
通过闭环控制保持稳定的条件。
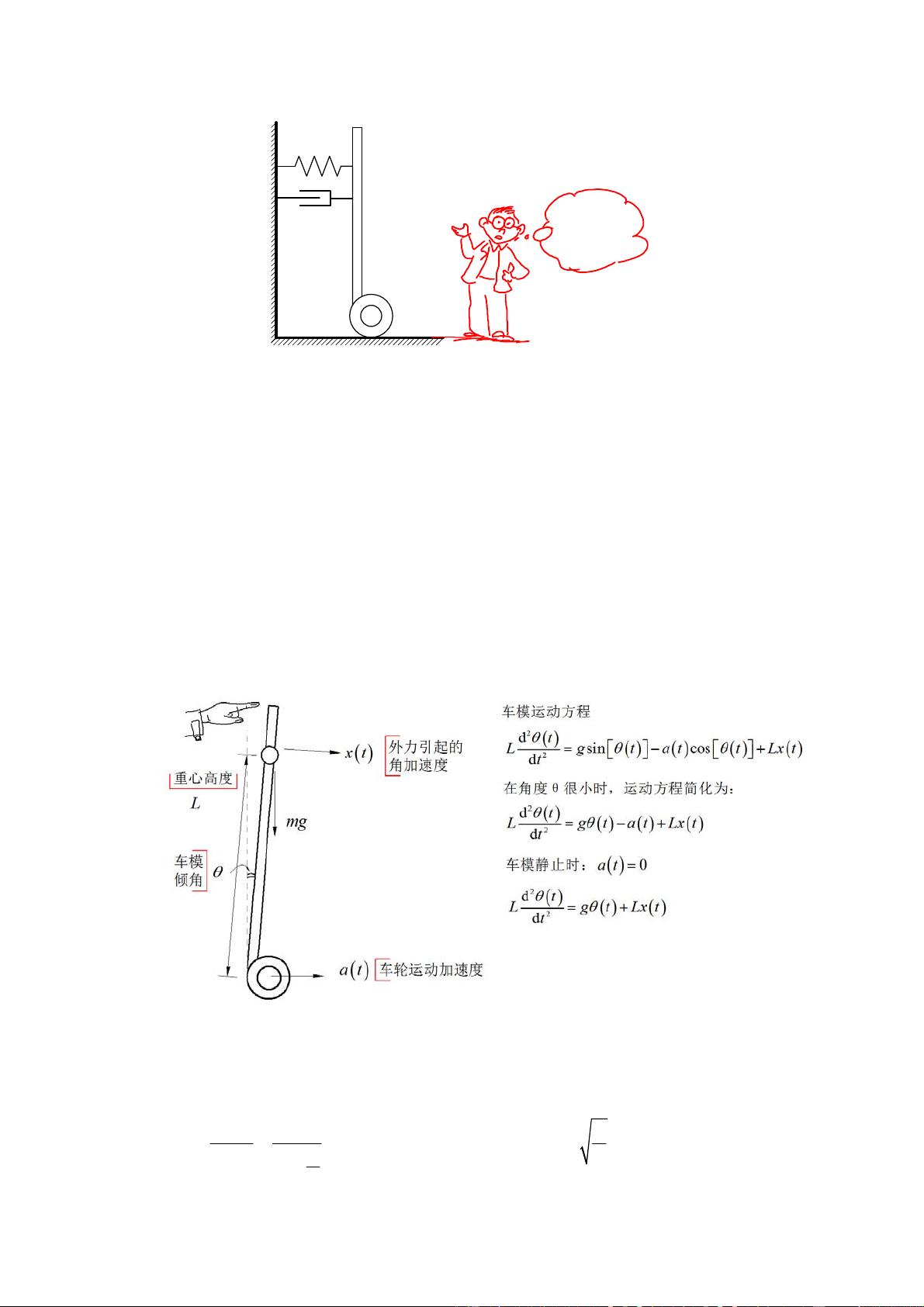
假设倒立车模简化成高度为 L,质量为 m 的简单倒立摆,它放置在可以左右移动的
车轮上。假设外力干扰引起车模产生角加速度 ()
x
t 。沿着垂直于车模地盘方向进行受力
分析,可以得到车模倾角与车轮运动加速度 以及外力干扰加速度()at ()
x
t 之间的运动方
程。如图 2-11 所示。
图 2‐11 车模运动方程
对应车模静止时,系统输入输出的传递函数为:
()
()
()
2
1
s
Hs
g
Xs
s
L
Θ
==
−
,此时系统具有两个极点
p
g
s
L
=±
。一个极点位于 s 平面的
16

剩余107页未读,继续阅读
2023-08-30 上传
2023-07-16 上传
2023-05-13 上传
2023-08-23 上传
2023-07-22 上传
2023-07-28 上传

远方小草龟
- 粉丝: 15
- 资源: 13
 我的内容管理
展开
我的内容管理
展开







最新资源
- AirKiss技术详解:无线传递信息与智能家居连接
- Hibernate主键生成策略详解
- 操作系统实验:位示图法管理磁盘空闲空间
- JSON详解:数据交换的主流格式
- Win7安装Ubuntu双系统详细指南
- FPGA内部结构与工作原理探索
- 信用评分模型解析:WOE、IV与ROC
- 使用LVS+Keepalived构建高可用负载均衡集群
- 微信小程序驱动餐饮与服装业创新转型:便捷管理与低成本优势
- 机器学习入门指南:从基础到进阶
- 解决Win7 IIS配置错误500.22与0x80070032
- SQL-DFS:优化HDFS小文件存储的解决方案
- Hadoop、Hbase、Spark环境部署与主机配置详解
- Kisso:加密会话Cookie实现的单点登录SSO
- OpenCV读取与拼接多幅图像教程
- QT实战:轻松生成与解析JSON数据
