移动机器人运动规划与控制:理论与优化
需积分: 10 69 浏览量
更新于2024-07-18
1
收藏 1.55MB PDF 举报
"移动机器人运动规划及控制 - Magnus Egerstedt 博士论文"
这篇博士论文探讨了移动机器人领域的关键问题,主要集中在运动规划与控制上。作者Magnus Egerstedt通过研究从自主机器人技术中出现的各种控制理论问题,为解决这些问题提供了深入的见解。这些议题包括但不限于路径规划、控制系统设计,以及基于混合自动机理论的复杂系统建模与分析。
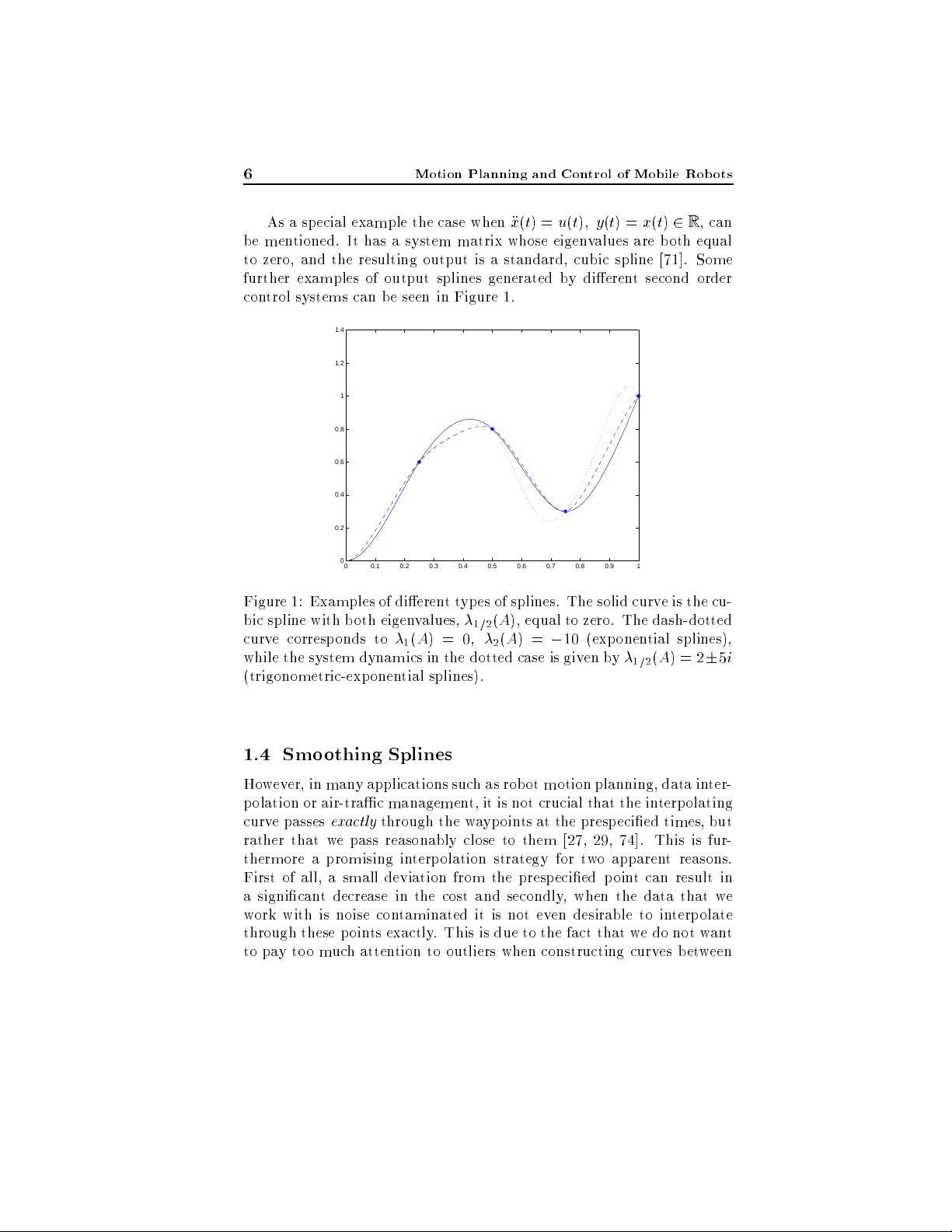
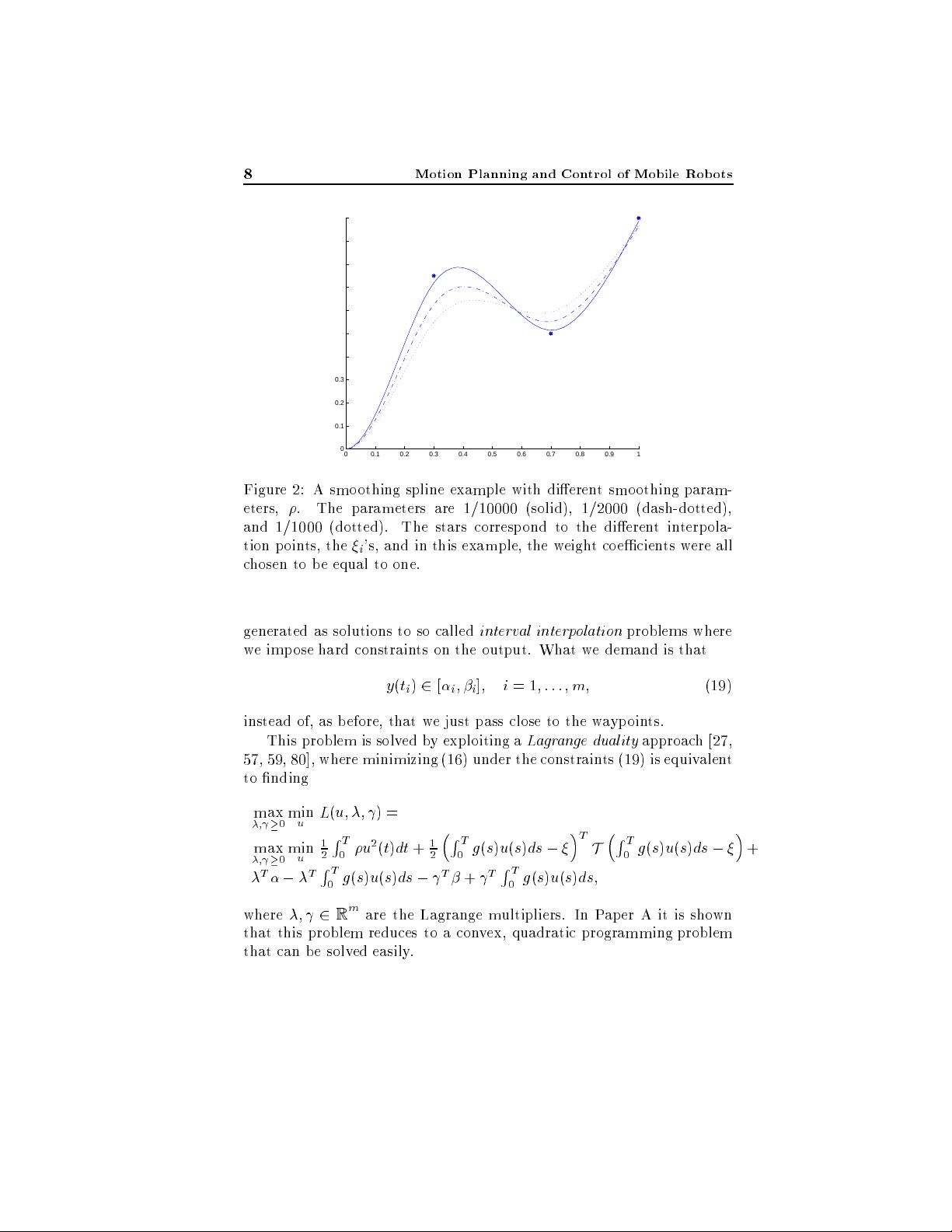
论文提出了一种路径规划方法,用于生成平滑的样条曲线。这些样条不仅在能量函数方面具有最优性,同时还能引导给定线性控制系统输出接近预设的目标点。这种方法生成的曲线数值计算成本低,因此适合在线实时应用,这对于实时运动控制的移动机器人来说至关重要。
在运动规划方面,论文可能涵盖了如何在考虑环境障碍和动态约束的同时,寻找机器人从起点到终点的最优路径。这通常涉及到搜索算法(如A*算法)的应用,以及在有限计算时间内找到近似最优解的技术。
在控制系统设计中,论文可能会讨论如何设计控制器来确保机器人的精确定位和稳定运动。这可能涉及到状态反馈、模型预测控制或滑模控制等策略。此外,对于复杂的控制系统,论文可能还涉及了如何使用混合自动机理论来描述和分析系统的离散与连续行为。
混合自动机理论是现代控制理论的一个重要分支,它允许建模和分析具有离散事件和连续动态的系统。在机器人应用中,这种理论可以用来处理机器人行为的切换,比如从行走到停止,或者从自动驾驶模式转换到手动操作模式。
论文的贡献可能还包括对现有算法的改进,如优化路径规划的效率,或者增强控制系统对不确定性和外部干扰的鲁棒性。此外,实验验证和实际应用案例可能也贯穿于论文之中,以展示所提出的理论和方法在真实世界移动机器人系统中的有效性。
"motion plan control"这一主题的深入研究为移动机器人领域带来了新的理论成果和实用工具,对于推动机器人自主导航和控制技术的发展具有重要意义。

4
Motion Planning and Control of Mobile Robots
and the optimal control law is referred to as the
linear-quadratic optimal
regulator
.
In (8),
P
satises the matrix valued
Riccati equation
_
P
=
;
A
T
P
;
PA
+
PBR
;
1
B
T
P
;
Q
P
(
T
)=
S;
(9)
which can be shown to have a unique, b ounded, semi-denite solution on
[0
;T
][58].
After this brief summary of some well-known, classical results from
linear control theory,wecan move on to more recent results that connect
interpolating splines with optimal control theory.
1.3 Interp olating Splines
In this section, we only consider single-input, single-output linear control
systems on a sp ecial, control canonical form, namely
A
=
0
B
B
B
B
B
@
0 1 0
0
0 0 1
0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0
1
;
a
n
;
a
n
;
1
;
a
n
;
2
;
a
1
1
C
C
C
C
C
A
;
b
=
0
B
B
B
B
B
@
0
0
.
.
.
0
1
1
C
C
C
C
C
A
; c
=
0
B
B
B
B
B
@
1
0
.
.
.
0
0
1
C
C
C
C
C
A
;
(10)
which can easily be shown to constitute a minimal system with relative
degree
n
.
What wenowwanttoachieveistondthe minimum energy control
that makes the output of this control system satisfy the constraints (2).
We, based on [34, 81], rewrite the invertible reachability Grammian
as
W
(0
;T
)=
e
AT
M
(
T
)
;
1
e
A
T
T
;
(11)
where
M
(
t
)=
Z
t
0
e
;
As
bb
T
e
;
A
T
s
ds
;
1
;
(12)


剩余191页未读,继续阅读
2020-12-15 上传
2023-06-15 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

share_share
- 粉丝: 0
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- 俄罗斯RTSD数据集实现交通标志实时检测
- 易语言开发的文件批量改名工具使用Ex_Dui美化界面
- 爱心援助动态网页教程:前端开发实战指南
- 复旦微电子数字电路课件4章同步时序电路详解
- Dylan Manley的编程投资组合登录页面设计介绍
- Python实现H3K4me3与H3K27ac表观遗传标记域长度分析
- 易语言开源播放器项目:简易界面与强大的音频支持
- 介绍rxtx2.2全系统环境下的Java版本使用
- ZStack-CC2530 半开源协议栈使用与安装指南
- 易语言实现的八斗平台与淘宝评论采集软件开发
- Christiano响应式网站项目设计与技术特点
- QT图形框架中QGraphicRectItem的插入与缩放技术
- 组合逻辑电路深入解析与习题教程
- Vue+ECharts实现中国地图3D展示与交互功能
- MiSTer_MAME_SCRIPTS:自动下载MAME与HBMAME脚本指南
- 前端技术精髓:构建响应式盆栽展示网站
