Modern Control Theory Applications in MATLAB: State Observer and Controller Design
发布时间: 2024-09-15 01:09:19 阅读量: 47 订阅数: 40 
# Chapter 1: Overview of MATLAB Control System Simulation
## 1.1 The Importance of MATLAB in Control System Simulation
MATLAB, as a high-performance technical computing environment that integrates numerical computation, visualization, and programming, is particularly suitable for control system design, simulation, and analysis. Its control systems toolbox provides a series of functions and simulation modules, supporting everything from basic linear system analysis to the design of complex multivariable control systems. For control system engineers and researchers, MATLAB not only simplifies the modeling, simulation, and analysis processes of control systems but also supports the implementation of various complex algorithms in modern control theory through its rich toolboxes.
## 1.2 Basic Process of Control System Simulation
Control system simulation involves the use of computers to study and predict the dynamic behavior of actual physical systems. Simulation allows engineers to adjust parameters, test different control strategies, and observe system responses in a virtual environment without worrying about the risks and costs of real-world experimentation. The simulation process generally includes key steps such as establishing mathematical models, defining input/output signals, setting simulation parameters, executing simulations, and analyzing results. These steps enable a better understanding of system performance and the optimization of designs to meet specific performance criteria.
## 1.3 Key Application Areas of Control System Simulation
Control system simulation is widely applied in various engineering fields, including industry, aerospace, automotive, biomedical, and others. For example, in the automotive industry, simulation can be used to test and optimize the performance of Anti-lock Braking Systems (ABS). In the aerospace field, simulation is used for the design and validation of satellite attitude control algorithms. These application areas demonstrate the value of control simulation as a powerful tool that significantly improves design efficiency, reduces costs, and enhances system safety and reliability.
# Chapter 2: Fundamentals of Modern Control Theory
## 2.1 Main Concepts of Control Systems
In modern control theory, the basic components of a control system include the control object (controlled system), controller (regulating device), actuator (driving device), feedback loop, etc. The design goal of a control system is to achieve precise control over the dynamic response and performance of the system.
### 2.1.1 System State and Dynamic Behavior
The system state generally refers to the internal conditions of a system at any given moment, which uniquely determine the future dynamic behavior of the system. State variables represent the system's state, and their relationship as they change over time is described by the state equations. For linear time-invariant systems, the general form of the state equations can be written as:
\[ \dot{x}(t) = Ax(t) + Bu(t) \]
\[ y(t) = Cx(t) + Du(t) \]
Where, \( x(t) \) is the state vector, \( u(t) \) is the input vector, \( y(t) \) is the output vector, and \( A \), \( B \), \( C \), \( D \) are the system matrices.
### 2.1.2 State Space Representation and Transfer Function
The state space representation provides a complete description of the system from input to output. It emphasizes the evolution of internal states and is crucial for analyzing system characteristics such as stability, controllability, and observability. In contrast, the transfer function focuses on the relationship between the system's input and output and is typically used to describe the dynamic behavior of linear systems, especially in frequency domain analysis. For the aforementioned state space model, the corresponding transfer function \( G(s) \) can be given by \( C(sI - A)^{-1}B + D \), where \( s \) is a variable in the complex frequency domain.
## 2.2 Theoretical Framework of State Observers
The core purpose of a state observer is to estimate the internal states of a system, even when state variables cannot be directly measured.
### 2.2.1 Principles of Observer Design
The design of an observer should follow these principles:
- Stability: The observer system must be stable, meaning that estimation errors should decay over time to zero.
- Convergence Speed: The observer should be able to respond quickly to actual changes in the system's state.
- Disturbance Rejection: In the presence of noise, the observer should effectively suppress the influence of disturbances.
### 2.2.2 Types and Selection of Observers
Depending on different application needs and system characteristics, there are various types of observers:
- Luenberger Observer: Designed by ensuring the dynamic stability of the system's estimation error and convergence to zero.
- Kalman Filter: Suitable for systems with random noise disturbances, it estimates states by minimizing the mean square value of the estimation error.
## 2.3 Control Design Theory
The controller is the core part of a control system, responsible for adjusting control inputs based on the system's output and desired performance.
### 2.3.1 Objectives and Performance Indicators of Controllers
The goals of controller design typically include:
- System Stability: Ensuring the stable operation of the closed-loop system.
- Tracking Performance: The system's output can quickly and accurately track reference inputs.
- Disturbance Rejection: The system has good suppression capabilities against external interference.
Performance indicators may include:
- Rise Time: The time it takes for the system to rise from 0 to its final value.
- Overshoot: The maximum value by which the system response exceeds the set point.
- Settling Time: The time it takes for the system response to vary within the allowable error band around the set point.
### 2.3.2 Control Strategy and Forms of Control Laws
The choice of control strategy and control law depends on the system'***mon control strategies include:
- Linear Feedback Control: Adjusting the control input through a linear combination of output and reference input feedback.
- State Feedback Control: Designing the control law using state estimates.
Forms of control laws can be:
- Proportional (P), Integral (I), Derivative (D) Control: Combining P, I, D elements to design a PID controller.
- Optimal Control: Using methods such as LQR (Linear Quadratic Regulator) to solve optimal control problems and obtain control laws.
In the next section, we will delve into the specific applications of MATLAB in the design and implementation of state observers, demonstrating the operational steps from theory to practice, and providing corresponding code examples and analysis.
# Chapter 3: Practical State Observer Design in MATLAB
## 3.1 Steps for Implementing State Observers in MATLAB
### 3.1.1 Analysis of the Necessity of Designing Observers
In control systems, state observers play a vital role. Since some system states cannot be directly measured or are not easily accessible, state observers can indirectly estimate these state variables, providing necessary information for implementing state feedback control. Its necessity is mainly reflected in the following aspects:
1. **Measurability of State Variables**: Some internal state quantities of systems, such as concentration in certain chemical reactions, internal stress in mechanical systems, etc., cannot be directly measured, and observers can estimate these unobservable states.
2. **System Robustness**: The design of observers can make control systems more resistant to external disturbances and internal noise, increasing system robustness.
3. **Reducing Measurement Costs**: When designing control systems, if it is costly or technically infeasible to directly measure certain state variables, state observers can serve as an alternative.
4. **Assisting in the Implementation of Control Strategies**: In some advanced control strategies, such as Model Predictive Control (MPC), knowledge of the system's future states is required for optimization, and observers can be used to predict these states.
### 3.1.2 Design Using MATLAB Toolboxes
MATLAB provides a series of powerful toolboxes to assist in the design and implementation of state observers. Here, we will introduce the steps for designing observers using MATLAB's Control System Toolbox.
1. **Define the System Model**: First, you need to define the system model you want to design an observer for. This can usually be represented using transfer functions (`tf`) or state space (`ss`) models.
2. **Design Observers**: Utilize MATLAB functions, such as `place` or `acker`, to calculate the observer's gain matrix and achieve pole placement.
3. **Verify Observers**: Use `step`, `impulse`, or `initial` functions to simulate and verify the designed observers.
4. **Performance Analysis**: Use MATLAB tools, such as `stepinfo`, `bode`, etc., to analyze the observer's performance.
5. **Practical Application**: Apply the designed state observers to actual control systems, adjusting and optimizing observer design based on real data.
Through these steps, a preliminary observer model can be constructed. Additionally, MATLAB also supports more advanced observer design methods, such as using the `kalman` function to design Kalman filters, etc.
## 3.2 Common State Observer MATLAB Code Examples
### 3.2.1 Implementation of the Luenberger Observer
The Luenberger observer is a common state observer. Here is a simple MATLAB code example for designing a Luenberg

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【RTC定时唤醒实战】:STM32L151时钟恢复技术,数据保持无忧
# 摘要
本文深入探讨了RTC(Real-Time Clock)定时唤醒技术,首先概述了该技术的基本概念与重要性。随后,详细介绍了STM32L151微控制器的硬件基础及RTC模块的设计,包括核心架构、电源管理、低功耗特性、电路连接以及数据保持机制。接着,文章转向软件实现层面,讲解了RTC
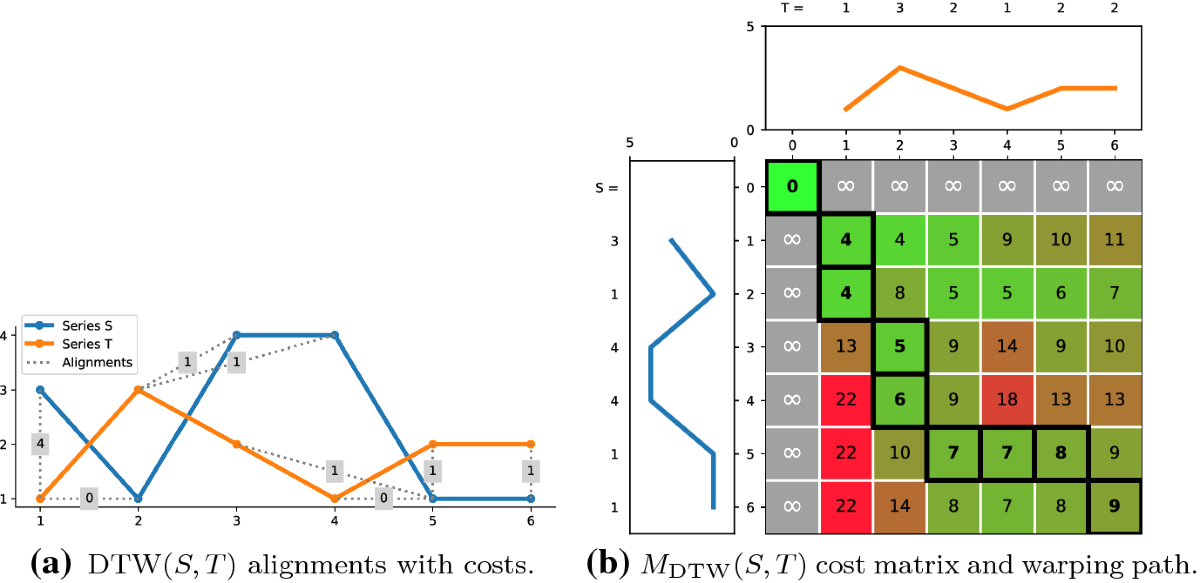
【DDTW算法入门与实践】:快速掌握动态时间规整的7大技巧
# 摘要
本文系统地介绍了动态时间规整(DTW)算法的基础知识、理论框架、实践技巧、优化策略和跨领域应用案例。首先,本文阐述了DTW算法的定义、背景以及其在时间序列分析中的作用。随后,详细探讨了DTW的数学原理,包括距离度量、累积距离计算与优化和约束条件的作用。接着,本文介绍了DTW算法在语音
跨平台打包实战手册:Qt5.9.1应用安装包创建全攻略(专家教程)
# 摘要
本文旨在详细探讨Qt5.9.1跨平台打包的全过程,涵盖了基础知识、环境配置、实战操作以及高级技巧。首先介绍了跨平台打包的基本概念及其重要性,随后深入到Qt5.9.1的环境搭建,包括开发环境的配置和项目的创建。在实战章节中,本文详细指导了在不同操作系统平台下的应用打包步骤和后续的测试与发布流程。更进一步,本文探讨了依赖管理、打包优化策略以及解决打包问题的方法和避免常见误区。最后,通过两个具体案例展示了简单和复杂项目的跨平台应用打包过程。本文为开发者提供了一个全面的指导手册,以应对在使用Qt5.9.1进行跨平台应用打包时可能遇到的挑战。
# 关键字
跨平台打包;Qt5.9.1;环境搭建
【Matlab_LMI工具箱实战手册】:优化问题的解决之道

# 摘要
Matlab LMI工具箱是控制理论和系统工程领域中用于处理线性矩阵不等式问题的一套强大的软件工具。本文首先介绍LMI工具箱的基本概念和理论基础,然后深入探讨其在系统稳定性分析、控制器设计、参数估计与优化等控制
无线局域网安全升级指南:ECC算法参数调优实战

# 摘要
随着无线局域网(WLAN)的普及,网络安全成为了研究的热点。本文综述了无线局域网的安全现状与挑战,着重分析了椭圆曲线密码学(ECC)算法的基础知识及其在WLAN安全中的应用。文中探讨了ECC算法相比其他公钥算法的优势,以及其在身份验证和WPA3协议中的关键作用,同时对ECC算法当前面临的威胁和参数选择对安全性能的影响进行了深入分析。此外,文章还介绍了ECC参数调优的实战技巧,包括选择标准和优化工具,并提供案例分析。最后,
【H0FL-11000系列深度剖析】:揭秘新设备的核心功能与竞争优势

# 摘要
本文详细介绍了H0FL-11000系列设备的多方面特点,包括其核心功能、竞争优势、创新技术的应用,以及在工业自动化、智慧城市和医疗健康等领域的实际应用场景。文章首先对设备的硬件架构、软件功能和安全可靠性设计进行了深入解析。接着,分析了该系列设备在市场中的定位,性能测试结果,并展望了后续开发路线图。随后,文中探讨了现代计算技术、数据处理与自动化智能化集成的实际应用案例。最
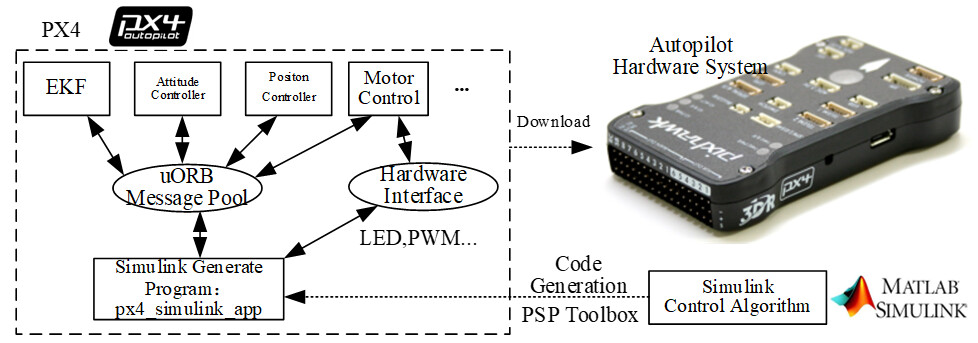
PX4-L1算法的先进应用:多旋翼与固定翼无人机控制革新
# 摘要
PX4-L1算法是一种先进的控制算法,被广泛应用于无人机控制系统中,以实现高精度的飞行控制。本文首先概述了PX4-L1算法的基本原理和理论基础,阐述了其在无人机控制中的应用,并对L1算法的收敛性和稳定性进行了深入分析。随后,本文探讨了L1算法在多旋翼无人机和固定翼无人机控制中的实施及对比传统算法的性能优势。进一步,文章着重
【利用FFmpeg打造全能型媒体播放器】:MP3播放器的多功能扩展的终极解决方案
# 摘要
本文介绍了利用FFmpeg媒体处理库构建基本MP3播放器的过程,涵盖了安装配置、用户交互设计、多功能扩展以及高级应用。内容包括在不同操作系统中安装FFmpeg、实现MP3文件播放、增强播放器功能如音频格式转换、处理视频和字幕、实时流媒体处理、音频分析以及自定义滤镜和特效。最后,本文讨论了播放器的性能优化与维护,包括调试、性能测试、跨平台兼容性以及插件架构的设计与实现。通过本指南,开发者可以创建功能强大、兼容性良好且性能优化的多用途媒体播放器。
# 关键字
FFmpeg;MP3播放器;多媒体处理;性能优化;跨平台兼容性;自定义滤镜
参考资源链接:[嵌入式Linux MP3播放器设计
【生产线自动化革命】:安川伺服驱动器在自动化生产线中的创新应用案例

# 摘要
生产线自动化是现代工业发展的重要趋势,伺服驱动器作为自动化系统的关键组成部分,对于实现高精度、高效能的生产过程至关重要。本文首先概述了生产线自动化和伺服驱动器的基本知识,继而详细探讨了安川伺服驱动器的工作原理和技术特点,重点分析了其在自动化中的优势。通过具体实践应用案
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )