Robust Design of Control Systems in MATLAB: Strategies Against Uncertainty
发布时间: 2024-09-15 00:55:57 阅读量: 36 订阅数: 40 

Design of Embedded Robust Control Systems Using MATLAB Simulink 无水印原版pdf
# Overview of Robust Control System Design in MATLAB
In the field of automation and electronic system design, robust control system design is key to ensuring that systems can withstand various uncertainties and interferences. MATLAB, as a powerful engineering computation and simulation tool, provides engineers and scholars with the necessary algorithms and visualization environment for designing robust control systems. In this chapter, we will outline the applications of MATLAB in the robust design of control systems, from theoretical foundations to practical operations, exploring its powerful functions and flexible applications in depth.
## 1.1 The Importance of Robust Control System Design
In practical applications, control systems inevitably encounter various internal or external interferences, such as environmental changes, equipment aging, and errors in sensors and actuators. Robust design requires the system to maintain stable and reliable performance indicators despite these interferences. MATLAB provides a series of tools and methods that enable designers to design robust control systems capable of adapting to various uncertainties through simulation and optimization processes.
## 1.2 Advantages of MATLAB as a Robust Design Tool
The reason MATLAB is widely adopted in robust control system design is due to its following advantages:
- Advanced mathematical operations and algorithms: Built-in mathematical function libraries and algorithm support for complex mathematical modeling and computation.
- Control system toolbox: Provides a series of functions and modules specifically for control system analysis, design, and simulation.
- Powerful graphical and visualization capabilities: Through graphical user interfaces (GUIs) and visualization tools, designers can intuitively observe system behavior.
The above content is the core concept of the first chapter, aiming to provide the reader with a preliminary understanding of the application of MATLAB in the robust design of control systems. The next chapter will delve into the theoretical foundations of robust control systems, including its definition, importance, and basic design theories.
# 2. Theoretical Foundations of Robust Control Systems
## 2.1 Concept and Importance of Robustness
### 2.1.1 Uncertainty Factors in Control Systems
Uncertain factors are inevitably encountered during the design process of control systems, which may originate from within the system, such as component aging, parameter drift, etc., or from outside the system, such as environmental disturbances, load changes, etc. Uncertainty factors negatively affect the performance of control systems, hence designing a robust control system is crucial. Robustness refers to the characteristic of a system that can maintain its performance indicators meeting predetermined requirements when facing model uncertainties and external disturbances.
### 2.1.2 Definition and Mathematical Description of Robustness
Mathematically, robustness can be described through the sensitivity of system outputs to inputs. A robust system should have performance indicator variations proportional to the changes in uncertain factors, rather than exponential changes. This can be further elaborated by introducing mathematical expressions of uncertainty into the system model. For example, in control systems, interval models, parameter variation ranges, and even probability distributions can be used to represent uncertainties.
Mathematical models are typically represented as:
\[ \begin{cases}
\dot{x}(t) = Ax(t) + Bu(t) + \Delta f(x,t) \\
y(t) = Cx(t)
\end{cases} \]
Where \( \Delta f(x,t) \) represents the uncertainty term, \( x(t), u(t), y(t) \) are the state, input, and output vectors of the system, respectively, and \( A, B, C \) are system matrices.
## 2.2 Basic Theories of Control System Design
### 2.2.1 System Stability Theory
System stability is one of the most critical performance indicators in control system design. If a system can return to a balanced state or remain within a certain error range over time after being disturbed, then the system is considered stable. Depending on the system, stability theories vary; for linear time-invariant systems (LTI), typically, Routh stability criteria and Bode plots are used to analyze stability.
A typical mathematical criterion for stability:
\[ \forall \epsilon > 0, \exists \delta > 0 : \forall x_0, ||x_0 - x_{\text{eq}}|| < \delta \Rightarrow ||x(t) - x_{\text{eq}}|| < \epsilon \]
### 2.2.2 Performance Indicators of Control Systems
Performance indicators of control systems are specific numerical standards used to measure the quality of system performance. These indicators include, but are not limited to, response speed, overshoot, steady-state error, and stability margins. They focus on different control requirements and application scenarios. For example, in fast-response systems, the main performance indicator of interest may be rise time, while for position control systems requiring high accuracy, the steady-state error becomes an important consideration.
### 2.2.3 Introduction to Robust Control Theory
Robust control theory specifically studies how to design control systems that are insensitive to model uncertainties and external disturbances. Its core idea is to enable the control system to adapt to a series of possible system changes without performance degradation or system instability. Robust control theory includes various design methods, such as H∞ control theory, sliding mode control, adaptive control, etc., each with its own advantages and limitations, suitable for different application scenarios.
## 2.3 Overview of Controller Design Methods
### 2.3.1 Traditional PID Controller Design
The Proportional-Integral-Derivative (PID) controller is one of the most widely used controllers in industrial control, with relatively simple design, easy to understand and implement. A PID controller adjusts the performance of a control system by tuning three parameters: proportional, integral, and derivative. Although PID controllers perform well in many cases, their performance may not be satisfactory when facing model uncertainties and complex dynamic environments.
### 2.3.2 Modern Control Theory Methods
Modern control theory provides various control methods more complex than PID, such as state feedback control, observer design, optimal control, adaptive control, and sliding mode control, etc. These methods usually require more complex mathematical models and calculations, but they can provide better control performance than PID controllers, especially when dealing with systems with complex dynamic behaviors and uncertainties.
### 2.3.3 Comparison and Selection of Controller Design Methods
Choosing the appropriate design method needs to be based on the specific requirements and characteristics of the control system. Typically, PID controllers are chosen as the preferred control method due to their simplicity, especially when the system model is relatively simple and does not change much. However, when facing complex systems, particularly those with high uncertainty or requiring special performance indicators, modern control theory methods need to be considered.
When selecting a control method, factors such as the dynamic characteristics of the system, performance indicator requirements, complexity of the controller, and implementation costs must be evaluated. For example, if the dynamic characteristics of the system are very complex, more advanced control algorithms may be needed to meet performance requirements. At the same time, considering implementation costs and the reliability of the control system, a trade-off between the complexity of the control algorithm and the performance of the controller also needs to be made. Before implementation, simulation experiments should also be conducted through software such as MATLAB to verify the effectiveness of the control strategy.
# 3. Application of MATLAB Tools in Robust Design
In the design and analysis of modern control systems, MATLAB (Matrix Laboratory), as a high-performance numerical computing and visualization software, has become one of the indispensable tools. MATLAB not only provides a user-friendly interactive environment but also supports the entire process of control system modeling, analysis, design, and simulation through its powerful toolboxes. This chapter will delve into the application of MATLAB in robust design, covering model establishment, simulation environment construction, and how to use MATLAB for system analysis and design.
## 3.1 Introduction to MATLAB Software
### 3.1.1 Basic Functions and Interface Layout of MATLAB
MATLAB software offers a large number of built-in functions and toolboxes for solving various engineering computing problems. Its basic functions include matrix operations, data visualization, data analysis, and algorithm development, etc. The user interface layout of MATLAB is straightforward and intuitive, mainly including the command window, editor, workspace, and path manager, etc. Users can execute operations directly in the command window, write scripts or functions in the editor, and use the workspace to view and manage data.
### 3.1.2 Introduction to the Control System Toolbox
The Control System Toolbox is a toolbox in MATLAB specifically designed for control system design and analysis. It includes a series of functions and graphical interface tools for designing and analyz

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Windows系统性能升级】:一步到位的WinSXS清理操作手册
# 摘要
本文针对Windows系统性能升级提供了全面的分析与指导。首先概述了WinSXS技术的定义、作用及在系统中的重要性。其次,深入探讨了WinSXS的结构、组件及其对系统性能的影响,特别是在系统更新过程中WinSXS膨胀的挑战。在此基础上,本文详细介绍了WinSXS清理前的准备、实际清理过程中的方法、步骤及
Lego性能优化策略:提升接口测试速度与稳定性
# 摘要
随着软件系统复杂性的增加,Lego性能优化变得越来越重要。本文旨在探讨性能优化的必要性和基础概念,通过接口测试流程和性能瓶颈分析,识别和解决性能问题。文中提出多种提升接口测试速度和稳定性的策略,包括代码优化、测试环境调整、并发测试策略、测试数据管理、错误处理机制以及持续集成和部署(CI/CD)的实践。此外,本文介绍了性能优化工具和框架的选择与应用,并
UL1310中文版:掌握电源设计流程,实现从概念到成品

# 摘要
本文系统地探讨了电源设计的全过程,涵盖了基础知识、理论计算方法、设计流程、实践技巧、案例分析以及测试与优化等多个方面。文章首先介绍了电源设计的重要性、步骤和关键参数,然后深入讲解了直流变换原理、元件选型以及热设计等理论基础和计算方法。随后,文章详细阐述了电源设计的每一个阶段,包括需求分析、方案选择、详细设计、仿真
Redmine升级失败怎么办?10分钟内安全回滚的完整策略
# 摘要
本文针对Redmine升级失败的问题进行了深入分析,并详细介绍了安全回滚的准备工作、流程和最佳实践。首先,我们探讨了升级失败的潜在原因,并强调了回滚前准备工作的必要性,包括检查备份状态和设定环境。接着,文章详解了回滚流程,包括策略选择、数据库操作和系统配置调整。在回滚完成后,文章指导进行系统检查和优化,并分析失败原因以便预防未来的升级问题。最后,本文提出了基于案例的学习和未来升级策
频谱分析:常见问题解决大全

# 摘要
频谱分析作为一种核心技术,对现代电子通信、信号处理等领域至关重要。本文系统地介绍了频谱分析的基础知识、理论、实践操作以及常见问题和优化策略。首先,文章阐述了频谱分析的基本概念、数学模型以及频谱分析仪的使用和校准问题。接着,重点讨论了频谱分析的关键技术,包括傅里叶变换、窗函数选择和抽样定理。文章第三章提供了一系列频谱分析实践操作指南,包括噪声和谐波信号分析、无线信号频谱分析方法及实验室实践。第四章探讨了频谱分析中的常见问题和解决
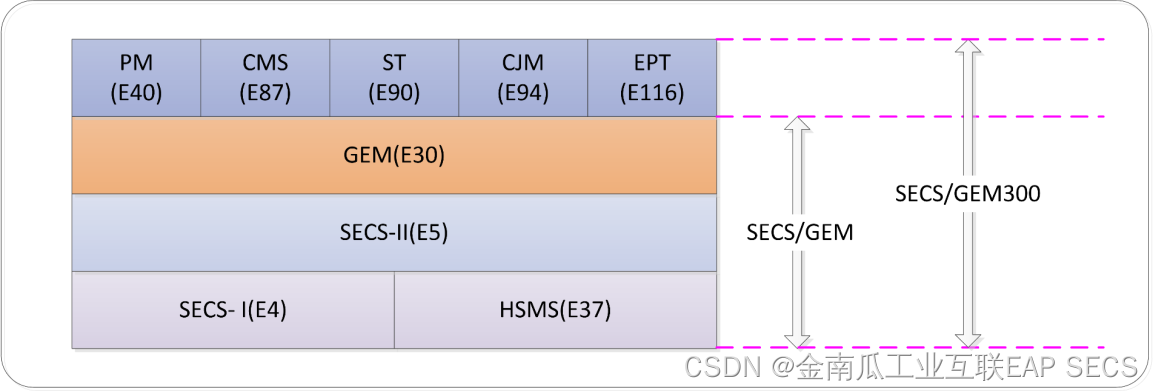
SECS-II在半导体制造中的核心角色:现代工艺的通讯支柱
# 摘要
SECS-II标准作为半导体行业中设备通信的关键协议,对提升制造过程自动化和设备间通信效率起着至关重要的作用。本文首先概述了SECS-II标准及其历史背景,随后深入探讨了其通讯协议的理论基础,包括架构、组成、消息格式以及与GEM标准的关系。文章进一步分析了SECS-II在实践应用中的案例,涵盖设备通信实现、半导体生产应用以及软件开发与部署。同时,本文还讨论了SECS-II在现代半导体制造
深入探讨最小拍控制算法
# 摘要
最小拍控制算法是一种用于实现快速响应和高精度控制的算法,它在控制理论和系统建模中起着核心作用。本文首先概述了最小拍控制算法的基本概念、特点及应用场景,并深入探讨了控制理论的基础,包括系统稳定性的分析以及不同建模方法。接着,本文对最小拍控制算法的理论推导进行了详细阐述,包括其数学描述、稳定性分析以及计算方法。在实践应用方面,本文分析了最小拍控制在离散系统中的实现、
【Java内存优化大揭秘】:Eclipse内存分析工具MAT深度解读

# 摘要
本文深入探讨了Java内存模型及其优化技术,特别是通过Eclipse内存分析工具MAT的应用。文章首先概述了Java内存模型的基础知识,随后详细介绍MAT工具的核心功能、优势、安装和配置步骤。通过实战章节,本文展示了如何使用MAT进行堆转储文件分析、内存泄漏的检测和诊断以及解决方法。深度应用技巧章节深入讲解
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )