Application of MATLAB in Robot Control Systems: Modeling and Control Strategies
发布时间: 2024-09-15 01:12:33 阅读量: 29 订阅数: 30 

Robot Modeling and Control
# 1. Fundamental Applications of MATLAB in Robot Control Systems
## 1.1 Introduction to MATLAB and its Role in the Robotics Field
As an advanced numerical computing environment, MATLAB boasts powerful matrix manipulation capabilities and a wealth of toolboxes. Especially in the realm of robot control, it plays a crucial role. MATLAB not only assists engineers in performing complex mathematical computations and simulation verification but also can quickly transform theoretical models into practical applications, significantly shortening the R&D cycle.
## 1.2 Basic Functions of MATLAB in Robot Control
In the fundamental applications of robot control systems, MATLAB primarily undertakes several core functions:
- **System Modeling**: Using MATLAB's Simulink module, it is convenient to construct the mathematical model of a control system.
- **Algorithm Simulation**: Through writing scripts or functions, MATLAB can simulate and test various control algorithms, such as PID control, and more complex advanced control strategies.
- **Performance Analysis**: MATLAB's built-in analysis tools and visualization features can quickly display the dynamic response and performance indicators of a control system.
Through in-depth discussion in this chapter, we will gradually uncover the mysterious veil of MATLAB's fundamental applications in robot control systems and lay a solid foundation for subsequent explorations of more complex applications such as dynamic modeling, control algorithm design, and path planning.
# 2. Implementation of Robot Dynamic Models in MATLAB
## 2.1 Basic Applications of MATLAB in Modeling
### 2.1.1 Theoretical Foundation of Modeling and Overview of MATLAB Toolboxes
Robot dynamics is the science that studies the interaction forces and torques between the joints and links of a robot. In MATLAB, we can use multiple toolboxes to implement complex dynamic models, including the Robotics Toolbox, Simulink, Simscape, etc. These toolboxes provide a rich set of functions and graphical interfaces, which can help researchers and engineers quickly build a robot's dynamic model, perform dynamic simulation, control strategy design, and verification.
The Robotics Toolbox was developed by Professor Peter Corke; it is a collection of MATLAB functions and classes for robot modeling, simulation, and visualization. It includes tools for defining robot models, drawing robots, and computing inverse kinematics.
When modeling in practice, physical parameters such as mass, length, and friction coefficients must first be defined. Then, models are established using functions provided by the toolboxes, defining the type of joints (such as revolute joints, prismatic joints) and the properties of links. For complex dynamic analysis, MATLAB's Simulink provides a more advanced simulation environment capable of simulating more complex dynamic systems.
```matlab
% Example: Using the Robotics Toolbox to define a simple two-link planar robot model
L1 = Link('d', 0, 'a', 1, 'alpha', 0);
L2 = Link('d', 0, 'a', 1, 'alpha', 0);
robot = SerialLink([L1 L2], 'name', 'TwoLinkRobot');
robot.plot([0.5*pi 0.5*pi]); % Draws the robot image
```
The above code defines a two-link robot model and draws its image. The construction of the robot model is the prerequisite for performing dynamic simulation.
### 2.1.2 Derivation of Dynamic Equations and MATLAB Representation Methods
The derivation of dynamic equations is typically based on Newton-Euler equations or Lagrange's equations. The Newton-Euler method is more suitable for intuitive force and acceleration analysis, while the Lagrange method provides a more general and elegant approach to building dynamic models.
In MATLAB, we can use the `gravity` and `inertia` functions in the Robotics Toolbox to calculate the system's gravity and inertia matrix and then use the `fdyn` or `rne` functions to calculate the system's dynamic equations. These functions are algorithmic implementations based on Lagrange's equations.
The dynamic equations are represented as:
\[ M(q)\ddot{q} + C(q, \dot{q})\dot{q} + G(q) = \tau \]
where \( M(q) \) is the inertia matrix, \( C(q, \dot{q}) \) is the Coriolis force and centrifugal force matrix, \( G(q) \) is the gravity term, \( \tau \) is the joint torque or force.
```matlab
% Example: Calculate and display the inertia matrix and gravity term of the robot model
q = [0; 0]; % Configuration of the robot joint angles
tau = robot梯队*ones(2,1); % Simulate an input joint torque
M = robot.inertia(q);
G = robot.gravity(q);
[C, Cd] = robot.coriolis(q, ones(2,1));
fprintf('Inertia Matrix (M):\n');
disp(M);
fprintf('Gravity Term (G):\n');
disp(G);
```
This code calculates the robot's inertia matrix and gravity term. Since MATLAB's Robotics Toolbox is optimized for symbolic computation, engineers can directly obtain different parts of the dynamic equations through function calls. Thus, more attention can be focused on the design of control strategies.
## 2.2 Robot Dynamic Simulation in MATLAB
### 2.2.1 Using Simulink for Dynamic Simulation
Simulink provides a graphical interactive environment for dynamic simulation, allowing users to build complex dynamic system models and run simulations on these models. In Simulink, dynamic simulation can be achieved by drawing system block diagrams. Users can convert the dynamically calculated equations directly into block diagrams in Simulink models, achieving intuitive system simulation.
The "SimMechanics" module in Simulink is specifically designed for dynamic simulation of mechanical systems. By dragging and dropping different blocks, such as "Body", "Joint", "Force", etc., users can build complex robot models and conduct dynamic analysis.
In "SimMechanics", each component of the model has corresponding parameter inputs, such as mass, inertia tensor, coordinate system, etc. These parameters can be set according to the characteristics of the real robot. After creating the dynamic simulation model, simulation can be started through the "Simulation" menu's "Start Simulation".
```matlab
% Example: Create a simple dynamic simulation model in Simulink
simulinkModel = 'TwoLinkRobotSimulink';
open_system(simulinkModel);
sim(simulinkModel); % Start simulation run
```
The above code assumes that we have already created a Simulink model named "TwoLinkRobotSimulink", which contains all the necessary mechanical components and parameter settings, and then启动仿真运行 through the sim function.
### 2.2.2 Optimization and Verification of Dynamic Parameters
After completing the dynamic simulation, it is necessary to verify the accuracy of the simulation results and optimize the model parameters to ensure that the simulation results match the performance of the real system. This usually involves comparing experimental data with simulation data and adjusting model parameters.
Parameter optimization can be performed using MATLAB's `fmincon`, `ga`, and other optimization functions, as well as Simulink's Parameter Estimation tool. By defining one or more performance indicators (e.g., minimizing errors), we can automatically adjust the model parameters to make the simulation data approach the experimental data.
```matlab
% Example: Using the fmincon function for parameter optimization
% Assuming we have a cost function cost_function, which contains parameters to be optimized param
% Initial parameters
initial_params = [1, 1]; % Example parameters
% Use fmincon for optimization
options = optimoptions('fmincon', 'Display', 'iter', 'Algorithm', 'interior-point');
opt_params = fmincon(@cost_function, initial_params, [], [], [], [], [], [], [], options);
% Update model parameters
robot.param = opt_params;
% Resimulate
sim(simulinkModel);
```
In this code, we define a cost function `cost_function`, which returns the error between the model output and experimental data. Through the `fmincon` function, we attempt to find a set of parameters that can minimize this cost function. Once the optimal parameters are found, the robot model is updated, and the simulation is restarted to verify the optimization effect.
## 2.3 Integration of MATLAB and Robot Control Algorithms
### 2.3.1 Implementation of Common Control Algorithms in MATLAB
In robot dynamic simulation, the design and implementation of control algorithms are key. MATLAB provides a wide range of functions and toolboxes to implement various control algorithms, including PID control, adaptive control, robust control, etc. These control algorithms can be used to adjust the joint torques of the robot model to achieve the desired motion state.
For example, we can use the `pid` function in MATLAB to design a simple PID controller with three control actions: proportional, integral, and derivative. By adjusting the parameters of the PID controller (proportional gain P, integral gain I, derivative gain D), we can achieve precise control of the robot.
```matlab
% Example: Using MATLAB's PID controller to control the joint position of a robot
% Define the PID controller
Kp = 10; % Proportional gain
Ki = 0.1; % Integral gain
Kd = 0.01; % Derivative gain
controller = pid(Kp, Ki, Kd);
% Assume we have a desired joint position target_position and an actual position current_position
% Calculate error
error = target_position - current_position;
% Calculate the controller output
control_signal = controller(error);
% Apply the control signal to the robot model
robot.addTorque(control_signal);
% Simulate
sim(simulinkModel);
```
In this code, we create a PID controller and calculate the control signal, then apply this signal to the robot model for simulation. By continuously adjusting the PID parameters, we can control the robot to reach the desired

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
PCM测试进阶必读:深度剖析写入放大和功耗分析的实战策略
# 摘要
相变存储(PCM)技术作为一种前沿的非易失性存储解决方案,近年来受到广泛关注。本文全面概述了PCM存储技术,并深入分析了其写入放大现象,探讨了影响写入放大的关键因素以及对应的优化策略。此外,文章着重研究了PCM的功耗特性,提出了多种节能技术,并通过实际案例分析评估了这些技术的有效性。在综合测试方法方面,本文提出了系统的测试框架和策略,并针对测试结果给出了优化建议。最后,文章通过进阶案例研究,探索了PCM在特定应用场景中的表现,并探讨了
网络负载均衡与压力测试全解:NetIQ Chariot 5.4应用专家指南
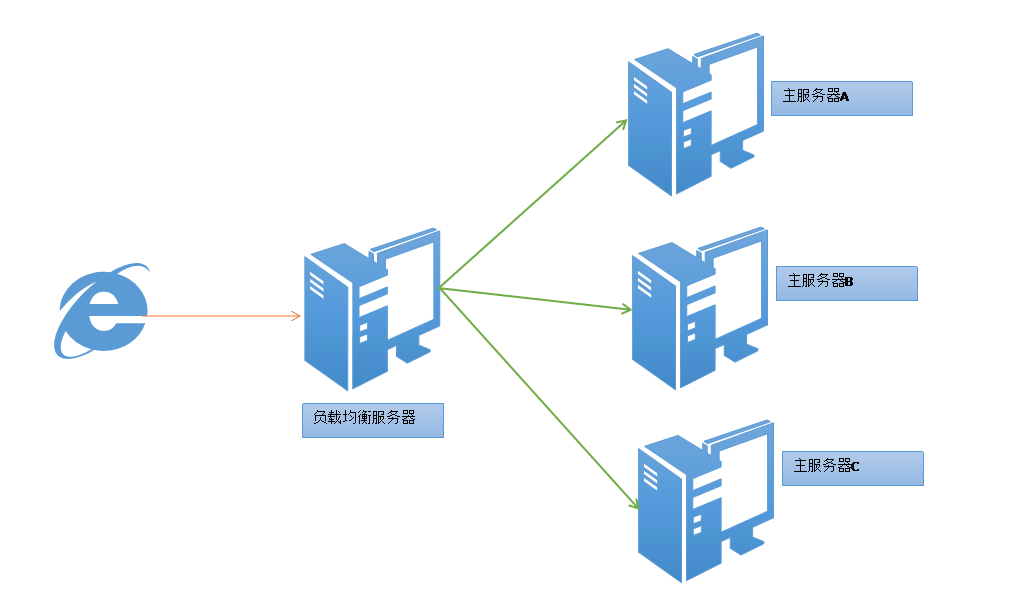
# 摘要
本文详细介绍了网络负载均衡的基础知识和NetIQ Chariot 5.4的部署与配置方法。通过对NetIQ Chariot工具的安装、初始化设置、测试场景构建、执行监控以及结果分析的深入讨论,展示了如何有效地进行性能和压力测试。此外,本文还探讨了网络负载均衡的高级应用,包括不同负载均衡策略、多协议支持下的性能测试,以及网络优化与故障排除技巧。通过案例分析,本文为网络管理员和技术人员提供了一套完整的网络性能提升和问
ETA6884移动电源效率大揭秘:充电与放电速率的效率分析

# 摘要
移动电源作为便携式电子设备的能源,其效率对用户体验至关重要。本文系统地概述了移动电源效率的概念,并分析了充电与放电速率的理论基础。通过对理论影响因素的深入探讨以及测量技术的介绍,本文进一步评估了ETA6884移动电源在实际应用中的效率表现,并基于案例研究提出了优化充电技术和改
深入浅出:收音机测试进阶指南与优化实战

# 摘要
本论文详细探讨了收音机测试的基础知识、进阶理论与实践,以及自动化测试流程和工具的应用。文章首先介绍了收音机的工作原理和测试指标,然后深入分析了手动测试与自动测试的差异、测试设备的使用和数据分析方法。在进阶应用部分,文中探讨了频率和信号测试、音质评价以及收音机功能测试的标准和方法。通过案例分析,本文还讨论了测试中常见的问题、解决策略以及自动化测试的优势和实施。最后,文章展望了收音机测试技术的未来发展趋势,包括新技术的应用和智能化测试的前
微波毫米波集成电路制造与封装:揭秘先进工艺
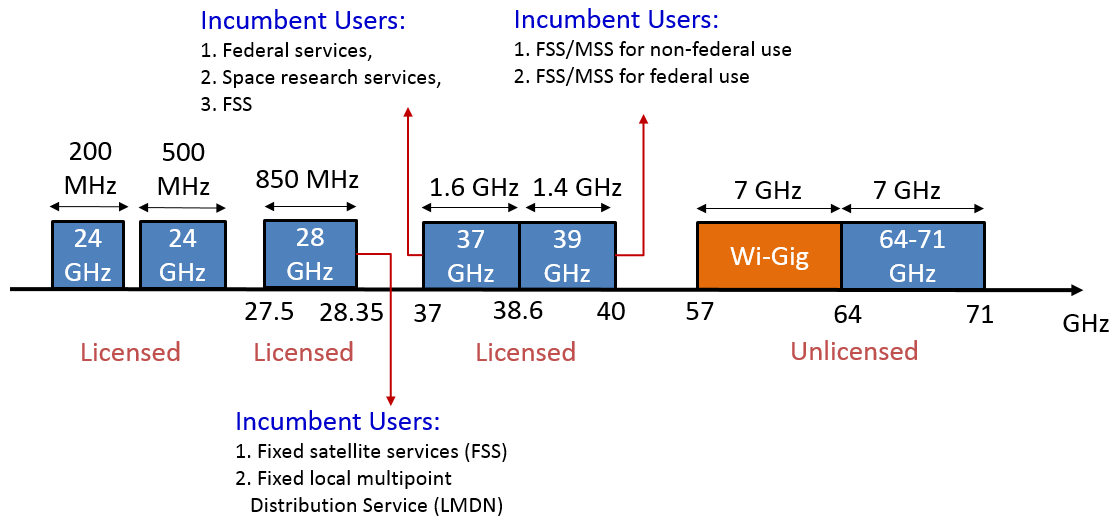
# 摘要
本文综述了微波毫米波集成电路的基础知识、先进制造技术和封装技术。首先介绍了微波毫米波集成电路的基本概念和制造技术的理论基础,然后详细分析了各种先进制造工艺及其在质量控制中的作用。接着,本文探讨了集成电路封装技术的创新应用和测试评估方法。在应用案例分析章节,本文讨论了微波毫米波集成电路在通信、感测与成像系统中的应用,并展望了物联网和人工智能对集成电路设计的新要求。最后,文章对行业的未来展望进
Z变换新手入门指南:第三版习题与应用技巧大揭秘

# 摘要
Z变换是数字信号处理中的核心工具,它将离散时间信号从时域转换到复频域,为分析和设计线性时不变系统提供强有力的数学手段。本文首先介绍了Z变换的基
Passthru函数的高级用法:PHP与Linux系统直接交互指南

# 摘要
本文详细探讨了PHP中Passthru函数的使用场景、工作原理及其进阶应用技巧。首先介绍了Passthru函数的基本概念和在基础交
【Sentaurus仿真调优秘籍】:参数优化的6个关键步骤

# 摘要
本文系统地探讨了Sentaurus仿真技术的基础知识、参数优化的理论基础以及实际操作技巧。首先介绍了Sentaurus仿真参数设置的基础,随后分析了优化过程中涉及的目标、原则、搜索算法、模型简化
【技术文档编写艺术】:提升技术信息传达效率的12个秘诀
# 摘要
本文旨在探讨技术文档编写的全过程,从重要性与目的出发,深入到结构设计、内容撰写技巧,以及用户测试与反馈的循环。文章强调,一个结构合理、内容丰富、易于理解的技术文档对于产品的成功至关重要。通过合理设计文档框架,逻辑性布局内容,以及应用视觉辅助元素,可以显著提升文档的可读性和可用性。此外,撰写技术文档时的语言准确性、规范化流程和读者意识的培养也是不可或缺的要
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )