Designing a PID Controller in MATLAB: Theory, Code, and Debugging
发布时间: 2024-09-15 00:36:37 阅读量: 36 订阅数: 40 

无需编写任何代码即可创建应用程序:Deepseek-R1 和 RooCode AI 编码代理.pdf
# 1. Overview of PID Controllers
A PID controller, which stands for Proportional-Integral-Derivative controller, is a feedback loop device widely used in industrial control. It calculates and outputs a corrective measure based on the deviation between the actual output of the system and the desired output to achieve dynamic control of the system. In this chapter, we will initially understand the basic concepts of PID controllers and their importance in control systems.
## 1.1 The Role and Significance of PID Controllers
PID controllers convert deviation signals into control signals through three control actions: proportion, integration, and differentiation, enabling the output of the controlled object to reach the desired value quickly and accurately. Whether it's a simple first-order system or a complex multivariable system, PID controllers stand out for their simple structure, ease of understanding and implementation, making them a core technology in the field of automation control.
## 1.2 The Origin and Development of PID Controllers
Since the invention of PID controllers at the beginning of the 20th century, they have been a cornerstone in automatic control systems. After a century of development, PID control theory has matured in industrial practice. The advent of modern digital technology has made automatic adjustment and optimization of PID parameters possible, greatly enhancing the performance and reliability of control systems.
## 1.3 The Application of PID Controllers in Modern Industry
In modern industry, PID controllers are widely used in various process controls, such as temperature, pressure, flow, speed, and more. They are not only found in traditional manufacturing and processing fields but also penetrate into advanced technology fields such as robotics, aerospace, and biomedicine.
*This chapter introduces the core concepts of PID controllers to the reader, laying the foundation for subsequent chapters that delve into the theoretical and practical applications of PID controllers.*
In the next chapter, we will explore in detail the working principles of PID controllers and their theoretical foundations in the MATLAB environment.
# 2. Theoretical Foundations of PID in MATLAB
## 2.1 The Working Principle of PID Controllers
### 2.1.1 Analysis of Proportional (P), Integral (I), and Derivative (D) Actions
In the field of automatic control, PID controllers are widely used feedback controllers. Their core function is to reduce the steady-state and dynamic errors of the system, thereby improving the system's response speed, stability, and robustness. A PID controller consists of three parts: Proportional (P), Integral (I), and Derivative (D), each of which has a specific impact on the system's output.
- **Proportional (P) Action**: Responsible for the direct proportional relationship between output and error, it can immediately respond to changes in error and provide basic control action. The larger the proportional coefficient (Kp), the more sensitive the system is to errors, but too large a proportional coefficient may cause system oscillations.
- **Integral (I) Action**: Mainly used to eliminate the steady-state error of the system. The integral action continuously accumulates errors and converts the accumulated value into a control signal. Therefore, when there is a persistent error, the integral term gradually increases the control action until the error is eliminated. The integral time constant (Ti) determines the speed of accumulation, with a smaller Ti resulting in a stronger integral action.
- **Derivative (D) Action**: Predicts the trend of error changes and pre-acts on the control system, which helps to reduce overshoot and oscillations in the system. The derivative term is sensitive to the rate of change of error. The larger the derivative coefficient (Kd), the faster the response to changes in error, but it may also cause a significant noise amplification effect.
### 2.1.2 Transfer Function and Time-Domain Analysis of PID Controllers
After understanding the individual components of PID, we can combine them to form the transfer function of the PID controller. In the Laplace transform domain, the transfer function of the PID controller can be represented as:
\[ C(s) = Kp + \frac{Ki}{s} + Kd s \]
Where, \(C(s)\) is the controller output, \(Kp\), \(Ki\), and \(Kd\) are the proportional, integral, and derivative gains, respectively, and \(s\) is the complex variable in the Laplace transform.
From a time-domain analysis perspective, the dynamic performance of a PID controller can be evaluated in three aspects:
1. **Transient Response**: The system's response to initial disturbances. This includes rise time, peak time, and settling time. The integral term can increase the system's response time, while the derivative term helps reduce overshoot and increase response speed.
2. **Steady-State Response**: The system's response after long-term operation. The integral term ensures that the system's steady-state error is zero, while the proportional and derivative terms provide immediate feedback for errors.
3. **Stability**: The ability of the system to maintain its output stability in the absence of external disturbances. The system's stability depends on the configuration of the PID controller parameters; inappropriate parameter settings may lead to instability.
## 2.2 PID Parameter Tuning Theory
### 2.2.1 Classical PID Parameter Adjustment Methods
Adjusting PID controller parameters is a critical step in achieving control objectives. There are several classical methods to adjust PID parameters, mainly divided into:
- **Trial and Error Method**: This is an experimental and error-based method that involves observing system responses and manually adjusting PID parameters until satisfactory results are achieved. Although this method is intuitive and easy to implement, it is inefficient and cannot guarantee finding the optimal solution.
- **Ziegler-Nichols (Z-N) Method**: The Z-N method is a systematic adjustment method that determines PID parameters by observing the system's critical oscillation point. This method is simple and easy to use, but the system must be able to safely enter an oscillatory state, and it may not be accurate for complex systems.
- **Cohen-Coon Method**: This is a parameter adjustment method based on the system's step response, providing a more accurate parameter estimation than the Z-N method. It is suitable for systems with delays, but the calculation process is relatively complex.
### 2.2.2 The Impact of PID Parameters on System Performance
Adjusting PID parameters has a clear impact on system performance, with the detailed effects of each parameter as follows:
- **Proportional Gain (Kp)**:直接影响系统的响应速度和稳定性。较大的比例增益可能会导致系统的快速响应,但也容易引起系统的振荡。因此,Kp的选择需要在快速响应和稳定性之间权衡。
- **Integral Gain (Ki)**: 影响系统消除稳态误差的能力。增大的Ki可以减少稳态误差,但过高的Ki值可能导致系统响应缓慢或振荡。因此,Ki的调整必须确保系统稳定性和合适的响应速度。
- **Derivative Gain (Kd)**: 在系统中引入微分作用可以预测误差的变化趋势,进而提前进行调整。提高微分增益有助于减少系统的超调和振荡,同时加速系统达到稳定状态。然而,过高的Kd值会放大测量噪声,使系统对噪声的敏感度增加。
PID parameter tuning is a multi-objective optimization problem that requires a balance between fast response, accuracy, and stability in the control system. To achieve optimal system performance, advanced adaptive or optimization algorithms may be needed to automatically adjust PID parameters.
# 3. Design and Code Implementation of PID Controllers in MATLAB
## Designing PID Controllers with MATLAB Simulink
### 3.1.1 Simulink Interface and Module Introduction
Simulink is an integrated environment in MATLAB for simulating dynamic systems. It provides a visual interface that allows users to build system models by dragging and dropping different modules. To design a PID controller, first, open Simulink and create a new model.
- **Signal Sources**: Modules used to generate input signals, such as Step and Sine Wave.
- **Continuous Modules**: Include modules for continuous dynamic systems, such as transfer functions and integrators.
- **Discrete Modules**: Such as Discrete Integrator, used for establishing discrete-time systems.
- **Sinks**: Modules used to observe system output signals, such as Scope and To Workspace.
### 3.1.2 Constructing a PID Control Model and Simulation Process
Before designing a PID controller, a thorough understanding of the controlled object is necessary. Once the system's behavior is understood, a basic closed-loop control model can be constructed. Here are the steps for building the model and running simulations:
1. Open Simulink and create a new model.
2. Drag a Step function module from the signal source library into the model as the reference input.
3. Drag a transfer function module from the continuous module library to represent the controlled system (Plant). Configure it with known transfer function parameters (such as numerator and denominator coefficients).
4. Drag a PID controller module from the library into the model and connect it to the controlled system module.
5. Connect the output of the Step function module to the reference input of the PID controller.
6. Connect the output of the PID controller back to the input of the controlled system to form a closed-loop system.
7. Connect an Oscilloscope module to the output of the closed-loop system to observe the system's response.
8. Configure the start and end times of the simulation and then run the simulation.
9. After the simulation, view the system response through the Oscilloscope mo

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
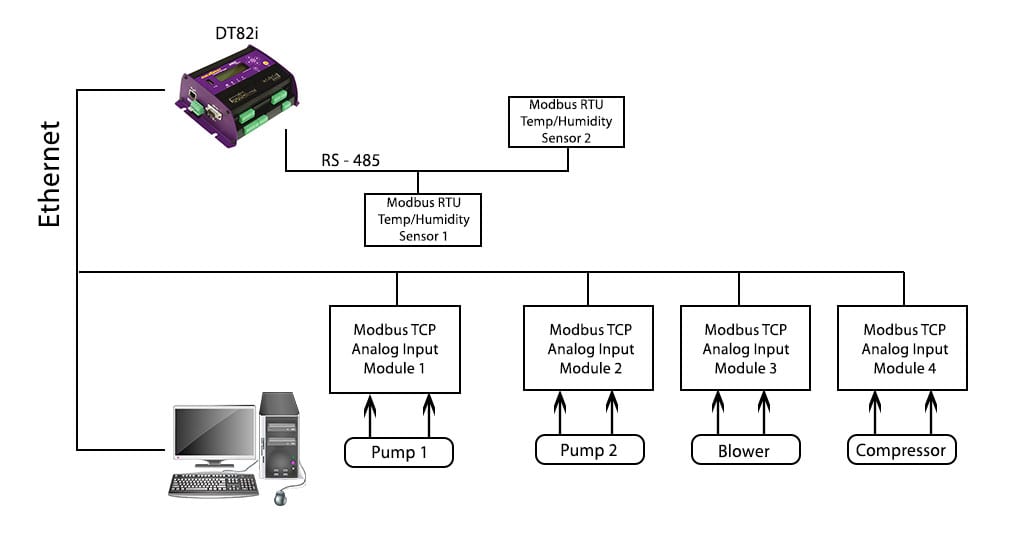
NModbus性能优化:提升Modbus通信效率的5大技巧
# 摘要
本文综述了NModbus性能优化的各个方面,包括理解Modbus通信协议的历史、发展和工作模式,以及NModbus基础应用与性能瓶颈的分析。文中探讨了性能瓶颈常见原因,如网络延迟、数据处理效率和并发连接管理,并提出了多种优化技巧,如缓存策略、批处理技术和代码层面的性能改进。文章还通过工业自动化系统的案例分析了优化实施过程和结果,包括性能对比和稳定性改进。最后,本文总结了优化经验,展望了NModbus性能优化技术的发展方向。
【Java开发者效率利器】:Eclipse插件安装与配置秘籍

# 摘要
Eclipse插件开发是扩展IDE功能的重要途径,本文对Eclipse插件开发进行了全面概述。首先介绍了插件的基本类型、架构及安装过程,随后详述了提升Java开发效率的实用插件,并探讨了高级配置技巧,如界面自定义、性能优化和安全配置。第五章讲述了开发环境搭建、最佳实践和市场推广策略。最后,文章通过案例研究,分析了成功插件的关键因素,并展望了未来发展趋势和面临的技
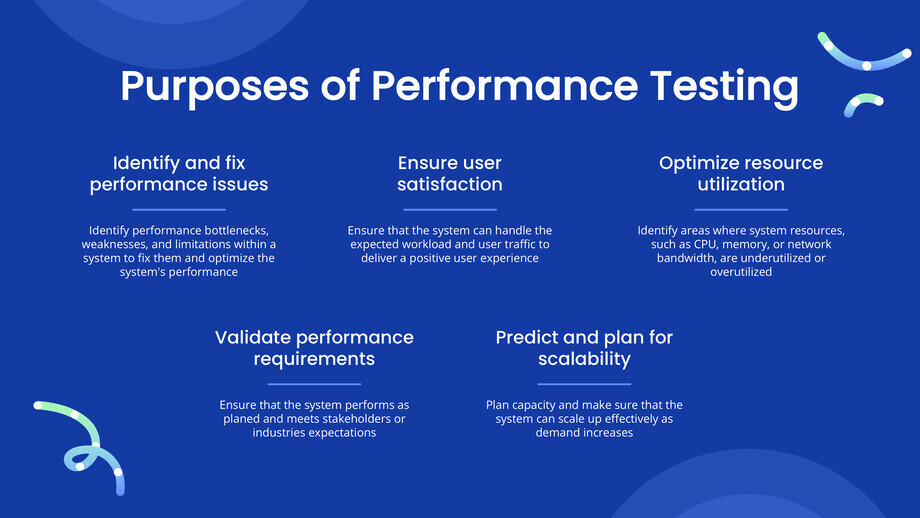
【性能测试:基础到实战】:上机练习题,全面提升测试技能
# 摘要
随着软件系统复杂度的增加,性能测试已成为确保软件质量不可或缺的一环。本文从理论基础出发,深入探讨了性能测试工具的使用、定制和调优,强调了实践中的测试环境构建、脚本编写、执行监控以及结果分析的重要性。文章还重点介绍了性能瓶颈分析、性能优化策略以及自动化测试集成的方法,并展望了
SECS-II调试实战:高效问题定位与日志分析技巧

# 摘要
SECS-II协议作为半导体设备通信的关键技术,其基础与应用环境对提升制造自动化与数据交换效率至关重要。本文详细解析了SECS-II消息的类型、格式及交换过程,包括标准与非标准消息的处理、通信流程、流控制和异常消息的识别。接着,文章探讨了SECS-II调试技巧与工具,从调试准备、实时监控、问题定位到日志分析
Redmine数据库升级深度解析:如何安全、高效完成数据迁移

# 摘要
随着信息技术的发展,项目管理工具如Redmine的需求日益增长,其数据库升级成为确保系统性能和安全的关键环节。本文系统地概述了Redmine数据库升级的全过程,包括升级前的准备工作,如数据库评估、选择、数据备份以及风险评估。详细介绍了安全迁移步骤,包括
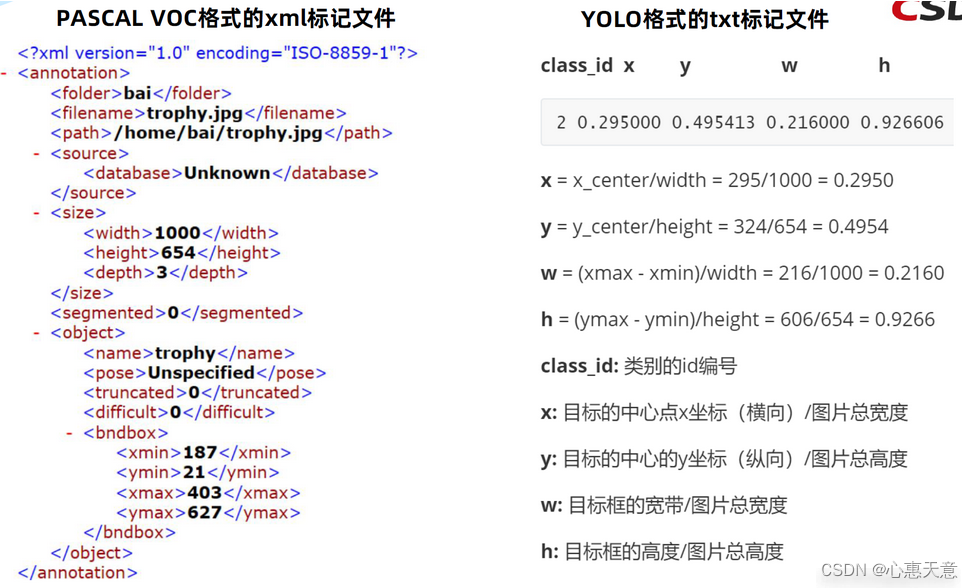
YOLO8在实时视频监控中的革命性应用:案例研究与实战分析
# 摘要
YOLO8作为一种先进的实时目标检测模型,在视频监控应用中表现出色。本文概述了YOLO8的发展历程和理论基础,重点分析了其算法原理、性能评估,以及如何在实战中部署和优化。通过探讨YOLO8在实时视频监控中的应用案例,本文揭示了它在不同场景下的性能表现和实际应用,同时提出了系统集成方法和优化策略。文章最后展望了YOLO8的未来发展方向,并讨论了其面临的挑战,包括数据隐私和模型泛化能力等问题。本文旨在为研究人员和工程技术人员提供YOLO8
UL1310中文版深入解析:掌握电源设计的黄金法则

# 摘要
电源设计在确保电气设备稳定性和安全性方面发挥着关键作用,而UL1310标准作为重要的行业准则,对于电源设计的质量和安全性提出了具体要求。本文首先介绍了电源设计的基本概念和重要性,然后深入探讨了UL1310标准的理论基础、主要内容以及在电源设计中的应用。通过案例分析,本文展示了UL1310标准在实际电源设计中的实践应用,以及在设计、生产、测试和认证各阶段所面
Lego异常处理与问题解决:自动化测试中的常见问题攻略

# 摘要
本文围绕Lego异常处理与自动化测试进行深入探讨。首先概述了Lego异常处理与问题解决的基本理论和实践,随后详细介绍了自动化测试的基本概念、工具选择、环境搭建、生命周期管理。第三章深入探讨了异常处理的理论基础、捕获与记录方法以及恢复与预防策略。第四章则聚焦于Lego自动化测试中的问题诊断与解决方案,包括测试脚本错误、数据与配置管理,以及性
【Simulink频谱分析:立即入门】

# 摘要
本文系统地介绍了Simulink在频谱分析中的应用,涵盖了从基础原理到高级技术的全面知识体系。首先,介绍了Simulink的基本组件、建模环境以及频谱分析器模块的使用。随后,通过多个实践案例,如声音信号、通信信号和RF信号的频谱分析,展示了Simulink在不同领域的实际应用。此外,文章还深入探讨了频谱分析参数的优化,信号处理工具箱的使用,以及实时频谱分析与数据采
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )