Optimization Problems in MATLAB Control Systems: Parameter Tuning and Algorithm Implementation
发布时间: 2024-09-15 00:58:59 阅读量: 12 订阅数: 18 
# 1. Overview of Control System Optimization Problems
In today's industrial automation, aerospace, and intelligent transportation systems, the performance of control systems is directly related to the overall efficiency and safety of the system. Control system optimization is a multidisciplinary field that involves control theory and systems engineering, as well as computer science, mathematical modeling, signal processing, and more. The goal of optimization is to improve system response speed, reduce energy consumption, enhance stability, and reliability. Control system optimization problems can generally be divided into two categories: parameter tuning, which involves adjusting system parameters to achieve optimal control effects; and structural optimization, which involves changing or optimizing the control system structure to improve its performance.
The optimization process often involves complex mathematical calculations and model building, requiring a set of scientific theories and methods. Moreover, engineers need to consider factors such as cost, real-time performance, and hardware limitations in actual operations, so the optimization process is also a comprehensive decision-making process that balances multiple factors. With the improvement of computing power and the advancement of algorithms, control system optimization has become an important means to enhance system performance. In the following chapters, we will delve into the core content and methods of control system optimization.
# 2. Basics of Control System Parameter Tuning
## 2.1 Mathematical Models of Control Systems
### 2.1.1 System Transfer Functions and State-Space Representation
In the design and analysis of control systems, transfer functions and state-space representations are two very important mathematical models. The transfer function provides a convenient tool for the analysis of linear time-invariant systems, while the state-space representation is more suitable for the analysis and design of multi-input multi-output systems and nonlinear systems.
The transfer function describes the relationship between the input and output of a linear time-invariant system in the form of a Laplace transform. A typical transfer function is shown below:
\[ G(s) = \frac{Y(s)}{U(s)} = \frac{b_ms^m + b_{m-1}s^{m-1} + ... + b_1s + b_0}{a_ns^n + a_{n-1}s^{n-1} + ... + a_1s + a_0} \]
where \(Y(s)\) and \(U(s)\) are the Laplace transforms of the system output and input, respectively, and \(b_i\) and \(a_i\) are constant coefficients.
The state-space representation provides a complete description of the internal dynamics of a system. For a linear time-invariant system, it can be represented by the following set of equations:
\[ \begin{cases}
\dot{x}(t) = Ax(t) + Bu(t) \\
y(t) = Cx(t) + Du(t)
\end{cases} \]
where \(x(t)\) is the state vector, \(u(t)\) is the input vector, \(y(t)\) is the output vector, and \(A\), \(B\), \(C\), and \(D\) are the system matrix, input matrix, output matrix, and direct transfer matrix, respectively.
### 2.1.2 Stability Analysis of Control Systems
Stability is one of the basic requirements for evaluating the performance of control systems. For linear systems, stability analysis is usually based on the system's characteristic roots. For the transfer function \(G(s)\), its stability can be determined by checking its poles (i.e., the roots of the denominator polynomial of \(G(s)\)). If all poles are located in the left half of the complex plane (i.e., the real part is less than zero), then the system is stable. For state-space representation, the stability of the system can be determined by the eigenvalues of its system matrix \(A\). If all eigenvalues of matrix \(A\) have a negative real part, then the system is stable.
In practice, the stability of the system can be analyzed by calculating the eigenvalues. In MATLAB, the `eig` function can be used to obtain the eigenvalues of the system matrix:
```matlab
A = [0 1; -1 -2];
eigenvalues = eig(A);
```
Analyzing the above code, the `eigenvalues` variable will contain the eigenvalues of matrix `A`. If all eigenvalues have a real part less than zero, then the system represented by the corresponding state-space model is stable.
## 2.2 Basic Theories of Parameter Tuning
### 2.2.1 Definition of Objective Functions for Parameter Tuning
During the control system parameter tuning process, the objective function (also known as the cost function or performance index) is the basis of the optimization process, describing the relationship between system performance and control parameters. The objective function is usuall***mon objective functions include:
- Integral of Squared Error (ISE)
- Time-Weighted Integral of Squared Error (ITSE)
- Integral of Absolute Error (IAE)
- Integral of Squared Error of the Final Value (ISE)
A typical Integral of Squared Error (ISE) objective function can be represented as:
\[ J(\theta) = \int_0^\infty t^2 | e(t) |^2 dt \]
where \( e(t) \) is the error signal, and \( \theta \) is the controller parameter vector. In practical applications, the choice of the objective function depends on the specific requirements of the problem.
### 2.2.2 Principles of Gradient Descent and Newton's Method
Gradient descent and Newton's method are two commonly used optimization algorithms for finding the minimum value of the objective function. Gradient descent is based on gradient information to iteratively update parameters, while Newton's method uses information from the first and second derivatives (Hessian matrix) of the objective function.
The update rule for gradient descent is:
\[ \theta_{k+1} = \theta_k - \alpha \nabla J(\theta_k) \]
where \( \alpha \) is the learning rate, \( \theta_k \) is the parameter value at the \( k \)-th iteration, and \( \nabla J(\theta_k) \) is the gradient of the objective function at \( \theta_k \).
Newton's method has a more complex update rule, attempting to find the local minimum of the objective function:
\[ \theta_{k+1} = \theta_k - \alpha [H(\theta_k)]^{-1} \nabla J(\theta_k) \]
where \( H(\theta_k) \) is the Hessian matrix of the objective function at \( \theta_k \).
In MATLAB, we can use the following code to implement the gradient descent method:
```matlab
% Initialize parameters
theta = initial_guess;
alpha = 0.01; % Learning rate
max_iter = 1000; % Maximum number of iterations
for k = 1:max_iter
% Compute the gradient
grad = compute_gradient(theta);
% Update parameters
theta = theta - alpha * grad;
% Other stopping conditions checks, etc...
end
```
## 2.3 Practical Operations of Parameter Tuning
### 2.3.1 Parameter Settings in the MATLAB Environment
When performing parameter tuning in MATLAB, you first need to set up the control system environment and the parameters of the optimization algorithm. This usually involves several steps:
1. Define the system model: This may include establishing transfer functions, state-space models, or any other form of mathematical model.
2. Design the initial controller: This may use a PID controller or any other control strategy.
3. Set the objective function: Write code to define the objective function based on system performance.
4. Initialize the optimization algorithm: Configure the parameters of the optimization algorithm, such as learning rate and number of iterations.
5. Execute the optimization: Run the optimization algorithm and monitor changes in performance during the iterative process.
In MATLAB, the `fmincon` function is a commonly used function for solving constrained nonlinear optimization problems. For example, we can use the following code to optimize controller parameters based on an objective function:
```matlab
% Define the objective function
function J = objective_function(theta)
% Assume the system model and controller are already defined
% Update controller parameters
update_controller_parameters(theta);
% Calculate the objective function
J = compute_performance_metric();
end
% Optimize parameters
options = optimoptions('fmincon','Display','iter','Algorithm','sqp');
theta_initial = [1, 1, 1]; % Initial parameter guess
theta_optimized = fmincon(@objective_function, theta_initial, [], [], [], [], [], [], [], options);
```
### 2.3.2 Practical Case Analysis of Parameter Tuning
To further illustrate how to perform parameter tuning in MATLAB, let's look at a simple case of PID controller parameter tuning. Consider a simple motor control system where we need to design a PID controller to maintain the motor speed.
First, we need to establish a transfer function model for the motor. Then, we define the PID controller parameters as variables for optimization. Our goal is to enable the motor to quickly and accurately reach the desired speed under different load conditions, while minimizing overshoot and oscillation.
```matlab
% Define the motor model transfer function
numerator = [Km];
denominator = [Jm Lm Rm Km];
G = tf(numerator, denominator);
% Set PID controller parameters
Kp = initial_Kp;
Ki = initial_Ki;
Kd = initial_Kd;
% PID controller transfer function
s = tf('s');
controller = Kp + Ki/s + Kd*s;
% Open-loop transfer function
open_loop_sys = series(controller, G);
% Use fmincon for optimization
% Define initial parameters and constraints
theta_initial = [Kp, Ki, Kd];
A = [];
b = [];
Aeq = [];
beq = [];
lb = [0, 0, 0]; % Lower bounds for parameters
ub = [Inf, Inf, Inf]; % Upper bounds for parameters
% Execute the optimization process
options = optimoptions('fmincon', 'Display', 'iter');
[theta_optimized, fval] = fmincon(@objective_function, theta_initial, A, b, Aeq, beq, lb, ub, [], options);
```
In this case, `objective_function` is a custom function that calculates the system performance index based on PID controller parameters. The optimization algorithm will attempt to find PID parameters that minimize the performance index. Note that in actual applications, we need to ensure that the configuration of the optimization algorithm (such as learning rate and number of iterations) can converge to satisfactory results.
After completing these steps, the `theta_optimized` obtained will be the optimized PID parameters. These parameters can be applied to the motor control system, expecting better performance. In practical operations, further verification and fine-tuning on the physical system are necessary to ensure the applicability and effectiveness of the optimization results.
# 3. Control Algorithm Implementation in MATLAB
## 3.1 Traditional Control Algorithms
### 3.1.1 Design and Optimization of PID Controllers
The Proportional-Integral-Derivative (PID) controller is one of the most common types of feedback controllers, and its design and optimization are of significant importance in the field of control systems. The PID controller works by adjusting the control output based on the difference between the setpoint and the actual output value (deviation) to quickly and accurately reach a steady state. Implementing PID controller design and optimization in MATLAB involves the following steps:
1. Use MATLAB's `pid` or `pidtune` function to define a PID controller.
2. Use the `step` function for step response analysis to evaluate the system's dynamic performance.
3. Apply optimization functions such as `fmincon` to perform parameter optimization to meet performance criteria.
In the code block, we can implement automatic optimization of PID parameters by defining an objective function, such as minimizing the weighted sum of overshoot and rise time.
```matlab
% Objective function: Minimize the weighted sum of overshoot and rise time
function J = pid_cost(PIDParams)
% PIDParams is the vector of PID controller parameters
Kp = PIDParams(1)
```
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 送3个月
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Parallelization Techniques for Matlab Autocorrelation Function: Enhancing Efficiency in Big Data Analysis
# 1. Introduction to Matlab Autocorrelation Function
The autocorrelation function is a vital analytical tool in time-domain signal processing, capable of measuring the similarity of a signal with itself at varying time lags. In Matlab, the autocorrelation function can be calculated using the `xcorr
Image Processing and Computer Vision Techniques in Jupyter Notebook
# Image Processing and Computer Vision Techniques in Jupyter Notebook
## Chapter 1: Introduction to Jupyter Notebook
### 2.1 What is Jupyter Notebook
Jupyter Notebook is an interactive computing environment that supports code execution, text writing, and image display. Its main features include:
-
Python pip性能提升之道
# 1. Python pip工具概述
Python开发者几乎每天都会与pip打交道,它是Python包的安装和管理工具,使得安装第三方库变得像“pip install 包名”一样简单。本章将带你进入pip的世界,从其功能特性到安装方法,再到对常见问题的解答,我们一步步深入了解这一Python生态系统中不可或缺的工具。
首先,pip是一个全称“Pip Installs Pac
Python序列化与反序列化高级技巧:精通pickle模块用法

# 1. Python序列化与反序列化概述
在信息处理和数据交换日益频繁的今天,数据持久化成为了软件开发中不可或缺的一环。序列化(Serialization)和反序列化(Deserialization)是数据持久化的重要组成部分,它们能够将复杂的数据结构或对象状态转换为可存储或可传输的格式,以及还原成原始数据结构的过程。
序列化通常用于数据存储、
Technical Guide to Building Enterprise-level Document Management System using kkfileview
# 1.1 kkfileview Technical Overview
kkfileview is a technology designed for file previewing and management, offering rapid and convenient document browsing capabilities. Its standout feature is the support for online previews of various file formats, such as Word, Excel, PDF, and more—allowing user
Pandas中的文本数据处理:字符串操作与正则表达式的高级应用
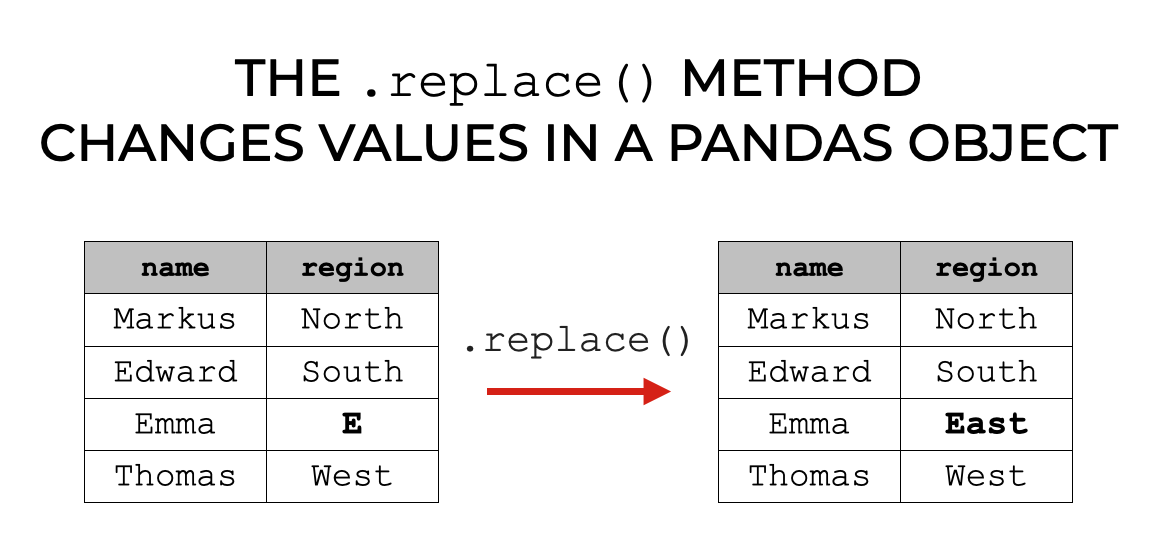
# 1. Pandas文本数据处理概览
Pandas库不仅在数据清洗、数据处理领域享有盛誉,而且在文本数据处理方面也有着独特的优势。在本章中,我们将介绍Pandas处理文本数据的核心概念和基础应用。通过Pandas,我们可以轻松地对数据集中的文本进行各种形式的操作,比如提取信息、转换格式、数据清洗等。
我们会从基础的字
[Frontier Developments]: GAN's Latest Breakthroughs in Deepfake Domain: Understanding Future AI Trends
# 1. Introduction to Deepfakes and GANs
## 1.1 Definition and History of Deepfakes
Deepfakes, a portmanteau of "deep learning" and "fake", are technologically-altered images, audio, and videos that are lifelike thanks to the power of deep learning, particularly Generative Adversarial Networks (GANs
Python print语句装饰器魔法:代码复用与增强的终极指南

# 1. Python print语句基础
## 1.1 print函数的基本用法
Python中的`print`函数是最基本的输出工具,几乎所有程序员都曾频繁地使用它来查看变量值或调试程序。以下是一个简单的例子来说明`print`的基本用法:
```python
print("Hello, World!")
```
这个简单的语句会输出字符串到标准输出,即你的控制台或终端。`prin
【Python集合异常处理攻略】:集合在错误控制中的有效策略
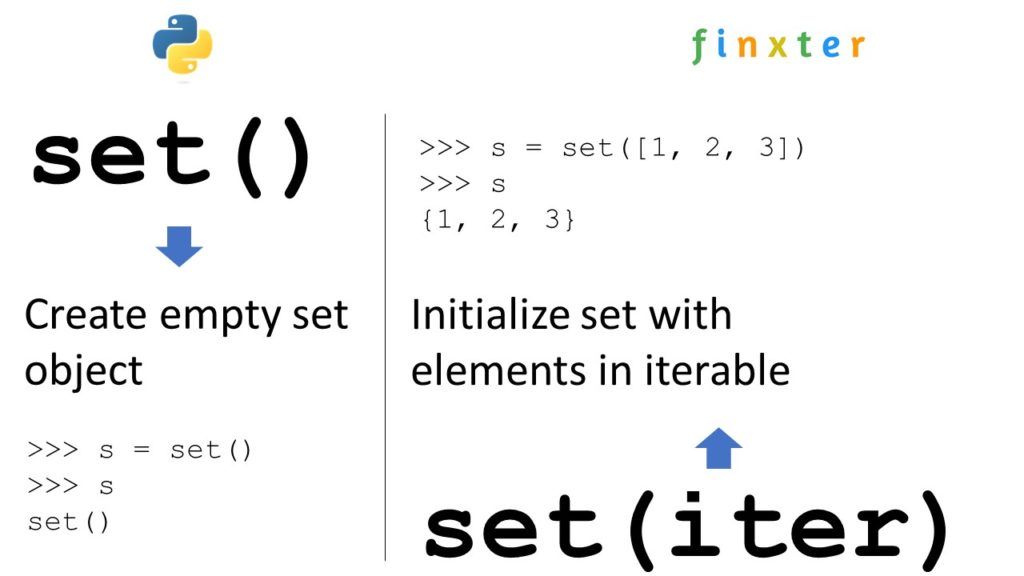
# 1. Python集合的基础知识
Python集合是一种无序的、不重复的数据结构,提供了丰富的操作用于处理数据集合。集合(set)与列表(list)、元组(tuple)、字典(dict)一样,是Python中的内置数据类型之一。它擅长于去除重复元素并进行成员关系测试,是进行集合操作和数学集合运算的理想选择。
集合的基础操作包括创建集合、添加元素、删除元素、成员测试和集合之间的运
Python版本与性能优化:选择合适版本的5个关键因素

# 1. Python版本选择的重要性
Python是不断发展的编程语言,每个新版本都会带来改进和新特性。选择合适的Python版本至关重要,因为不同的项目对语言特性的需求差异较大,错误的版本选择可能会导致不必要的兼容性问题、性能瓶颈甚至项目失败。本章将深入探讨Python版本选择的重要性,为读者提供选择和评估Python版本的决策依据。
Python的版本更新速度和特性变化需要开发者们保持敏锐的洞
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )