大规模MIMO系统多小区协作波束成形:上行-下行对偶性分析
179 浏览量
更新于2024-08-28
收藏 835KB PDF 举报
"基于上行链路-下行链路对偶性的大规模MIMO系统的多小区协作波束成形"
本文深入探讨了多小区多用户多天线系统中的联合波束形成和功率分配问题,旨在最大化最小信号对干扰加噪声比(最大-最小SINR)。研究的核心是利用上行链路-下行链路对偶性理论,这是无线通信系统在有限规模下优化性能的一种策略。首先,作者提出了一种迭代算法,通过扩展这一对偶性原理来实现最优性能。这种方法考虑了在系统中每个小区的多个天线同时工作,以及多个用户之间的相互干扰。
在有限规模的无线通信系统中,上行链路和下行链路之间存在对偶性。这意味着在一定的条件下,上行链路的优化问题可以转化为下行链路的优化问题,反之亦然。这种对偶性为解决复杂的多小区多天线系统优化问题提供了新的思路。作者通过迭代算法,可以在不牺牲系统性能的前提下,逐步调整波束形成和功率分配策略,以达到最大-最小SINR的目标。
接着,论文进一步将这一方法推广到大规模MIMO系统,利用大维随机矩阵理论来实现近似最优的多小区波束形成。在大规模MIMO系统中,由于天线数量巨大,传统的信号处理和优化方法可能过于复杂,难以实施。通过大维随机矩阵理论,可以简化计算,降低不同协调基站间信号交换的开销,同时保持良好的性能。
此外,文章还基于这些理论提出了有效的实现方案,即设计出一种高效算法,以适应不断变化的无线环境和用户需求。这包括动态的功率分配策略,以平衡各个用户的SINR,以及智能的波束形成技术,以减少小区间的干扰。这些技术的应用有助于提高系统的总体容量和覆盖范围,同时提高用户体验。
总结来说,该研究论文针对大规模MIMO系统中的多小区协作波束形成问题,利用上行链路-下行链路对偶性理论,提出了一种迭代算法和优化策略,旨在最大化最小SINR,减少信号交换开销,并通过大维随机矩阵理论实现近似最优性能。这些研究成果对于未来5G及更高级别的无线通信网络的设计具有重要的参考价值。
the fixed-point equation theory. To proceed, we introduce some
auxiliary variables {v
j
}
K
j=1
which represent the virtual noise
variance. Then the problem (6) with intractable per-BS power
constraints is transformed as follows
min
v
j
max
{w
m
,p
m
}
min
m
g
m
s.t.
I
m=1
v
m/I
⌈⌉
p
m
≤
K
j=1
v
j
P
j
, p
m
≥ 0, ||w
m
|| = 1
⎧
⎪
⎪
⎨
⎪
⎪
⎩
(7)
The existing results in [9–12] have revealed that the problem (7) is
dual to the following problem
min
v
j
max
{w
m
,
l
m
}
min
m
g
m
s.t.
I
m=1
l
m
≤
K
j=1
v
j
P
j
,
l
m
≥ 0, ||w
m
|| = 1.
⎧
⎪
⎪
⎨
⎪
⎪
⎩
(8)
where
l
m
denotes the transmit power of the virtual uplink user-m,
and
g
m
is the virtual uplink SINR for user-m and is given by
g
m
=
l
m
h
H
m,m
w
m
2
I
n=1,n=m
l
n
h
H
m,n
w
m
2
+ v
m/I
⌈⌉
. (9)
It is easy to see that the optimisation problem (8) is convex in {v
j
},
the problem (7) with respect to variables {v
j
} can be solved via a
subgradient projection method, and the subgradient of {v
j
}is
given by g = P
1
−
I
k=1
p
1,k
, ..., P
K
−
I
k=1
p
K,k
. Fixing {
l
n
}
and {v
j
}, the optimal receive beamformer is the MMSE receiver
which has an analytic structure, given by
w
opt
m
=
n=m
l
n
h
m,n
h
H
m,n
+ v
m/I
⌈⌉
I
M
m/I
⌈⌉
−1
h
m,m
n=m
l
n
h
m,n
h
H
m,n
+ v
m/I
⌈⌉
I
M
m/I
⌈⌉
−1
h
m,m
. (10)
According to the results obtained in [12], the uplink transmit power
with given
g
m
can be iteratively updated as follows
l
m
=
g
m
I
n=1,n=m
l
n
h
H
m,n
w
m
2
+ v
m/I
⌈⌉
h
H
m,m
w
m
2
, ∀m. (11)
Once the dual uplink problem (8) has been solved, according to the
uplink–downlink duality theory, the optimal uplink beamforming
vectors are the beamforming solution of the original downlink
problem, while the power solution of the downlink problem can
also be obtained from the uplink power allocation. Defining an
extended power vector
˜
p =
p
1
, and an extended coupling matrix
Q =
DG D1
I
1
P
max
˜
v
T
DG
1
P
max
˜
v
T
D1
I
,
⎡
⎣
⎤
⎦
(12)
where P
max
=
K
j=1
v
j
P
j
, the matrices G and D are, respectively,
given by
G
m,n
=
0 m = n
h
H
n,m
w
n
2
, m = n,
(13)
D
m,n
=
g
m
h
H
m,m
w
m
2
, m = n,0,m = n,
.
(14)
and
˜
v = v
1
···v
1
!" #
I
v
2
···v
2
!" #
I
···v
K
···v
K
!" #
I
⎛
⎝
⎞
⎠
T
. The conclusions in [9]
have revealed that the optimal power vector p is obtained as the
first
I components of the dominant eigenvector of Q, which can be
scaled so that its last component equals one.
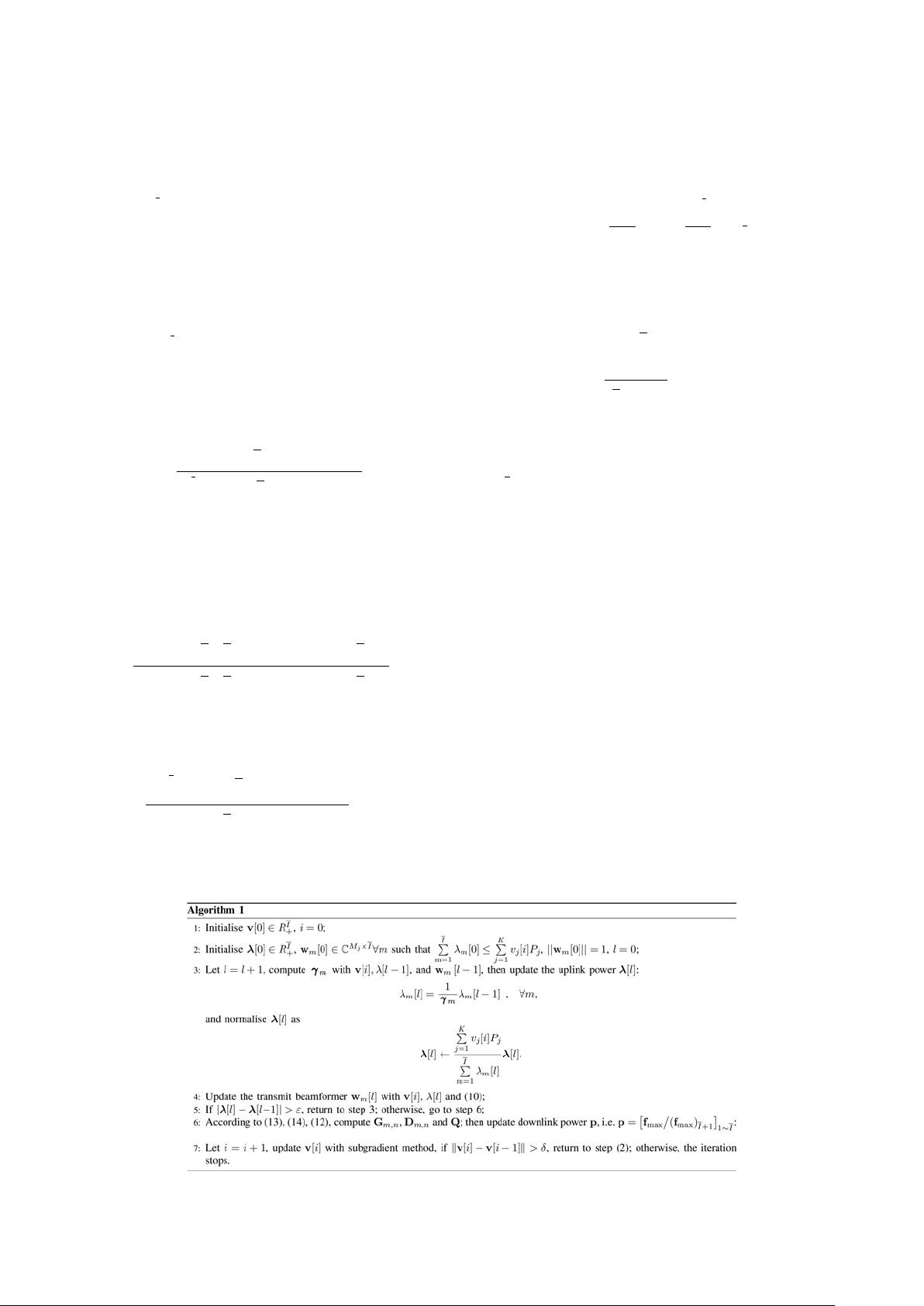
In summary, the distributed algorithm computing the optimal
solution of the problem (7) is given in Algorithm 1 (Fig. 1) where
f
max
is the maximum eigenvector of the extended coupling matrix
of Q,
6
is the update step-size, g is the subgradient of the virtual
noise vector v, ɛ denotes the threshold of inner iteration, and δ
denotes the threshold of outer iteration. It is easy to see that the
main computational complexity in Algorithm 1 (Fig. 1) is the
matrix inversion and the singular value decomposition (SVD) in
steps 4 and 6. The complexity of the matrix inversion and the
SVD of M × M matrix is O M
2.736
and O M
3
, respectively [22].
Therefore, in Algorithm 1 (Fig. 1), the complexity of the matrix
inversion is
f
K
j=1
O M
2.736
j
and the complexity of the SVD is
w
O KI + 1()
3
, where
f
and j denote, respectively, the number
of the iterations of steps 4 and 6.
4 Algorithm for large-scale system
The beamforming vectors can be efficiently calculated via analytical
expression, however, the iterative update of both the beamformers
and the power allocation is based on the instantaneous CSI in
Algorithm 1 (Fig. 1) designed for finite-scale system. The
Fig. 1 Multicell MU-MISO max–min SINR optimisation
IET Commun., 2016, Vol. 10, Iss. 17, pp. 2380–2390
2382
&
The Institution of Engineering and Technology 2016
剩余10页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-03-25 上传
2021-04-02 上传
2021-10-02 上传
2021-09-11 上传
2021-09-08 上传
2021-05-22 上传

weixin_38639872
- 粉丝: 9
- 资源: 952
 我的内容管理
展开
我的内容管理
展开







最新资源
- 硬盘高级维修技巧硬盘维修整理资料汇总
- Foundations Of Qt Development (英文/PDF)
- 让你的ADSL开机自动拨号
- 软件开发项目计划(实践)
- C#设计模式(word文档)
- flex事件机制详解
- text_porcess_in_python
- data mining and KDD: promise and challenges
- flex cookbook中文
- 事业单位考试绝密资料
- AJAX开发框架GWT
- Serial Port Complete-COM Ports, USB Virtual COM Ports, and Ports for Embedded Systems, 2nd Edition.pdf
- java 的面试试题
- 埃特梅尔AT89S52 单片机 参数资料
- § 1.2 Java的 特 点
- 线性代数(同济四版)习题答案
