梳理PX4 ECL EKF2状态估计算法:从原理到实现
需积分: 50 34 浏览量
更新于2024-07-09
2
收藏 294KB PDF 举报
PX4的EKF (Extended Kalman Filter,扩展卡尔曼滤波器)是其Estimation and Control Library (ECL) 中核心的算法之一,用于实时估计无人机的飞行状态,如位置、速度和姿态等。EKF是一种非线性滤波器,特别适合处理系统动态模型非线性的情况,如无人机的飞行运动。
本文档详细探讨了EKF2在PX4中的具体实现,首先回顾了EKF的基本概念。在EKF中,状态转移模型(Fk)表示系统状态随时间的变化,通常基于物理定律和控制输入;控制输入模型(Gk)则描述了控制变量如何影响状态;过程噪声wk按照多元正态分布假设,用协方差矩阵Qk来量化其不确定性。
观测模型(Hk)将系统状态映射到可观测的测量空间,观测噪声vk则反映了传感器读数的随机误差,通常假设为高斯分布。EKF的关键在于利用这两者之间的关系,通过卡尔曼增益矩阵进行状态估计更新,同时处理状态估计的不确定性和观测噪声。
在PX4的ECLEKF2中,作者Shuyong Chen解释了算法的复杂性,因为最初的描述是基于Matlab和Python,而最终的C++代码是通过符号推导系统优化得到的。然而,这些编程语言版本仅包含算法的核心部分,许多细节处理需要参考C++代码以理解完整流程。
文章接下来将深入解析ECLEKF2的具体步骤,包括预测(时间更新)阶段和更新(测量更新)阶段的数学处理,以及如何估计和更新状态估计(ˆxk|k)和误差协方差矩阵(Pk|k)。这个过程涉及到卡尔曼滤波的递推公式,以及如何根据当前状态信息和测量数据进行融合,以得到更精确的系统状态估计。
由于作者强调可能存在经验不足和错误遗漏,鼓励读者参与讨论和指正,这表明ECLEKF2在PX4中的实现是一个不断演进和完善的过程,反映了实际应用中的挑战和优化策略。
总结来说,这篇文档提供了对PX4中EKF2方程推导的全面介绍,不仅覆盖了理论基础,还揭示了实际工程中的复杂性和优化策略,对于理解和使用PX4的无人机飞控具有重要价值。
3 ECL EKF 所使用的传感器测量值 5
3.5
测距仪
测距仪的对地距离被用于一个单状态滤波器以估计地形相对于高度基准的垂直位置。
如果在可用作零高度基准面的平面上操作,则 EKF 也可以直接使用测距仪数据估算高度。
3.6 空速
当存在空速传感器并且飞机类型不是旋翼时,将使用空速数据。
3.7 合成侧滑
固定翼平台可以利用假定的侧滑观测值为零来改进风速估计,也可以在没有空速传感器的情况
下进行风速估计。
3.8 基于阻力比力的多旋翼风场估计
多旋翼平台可以利用沿 X 和 Y 机体轴的空速和阻力之间的关系来估计风速的北/东分量。
3.9 光流
光流传感器依赖测距仪,提供 xy 水平面的速度测量值。
3.10 外部视觉系统
外部视觉系统提供位置、速度和姿态测量。
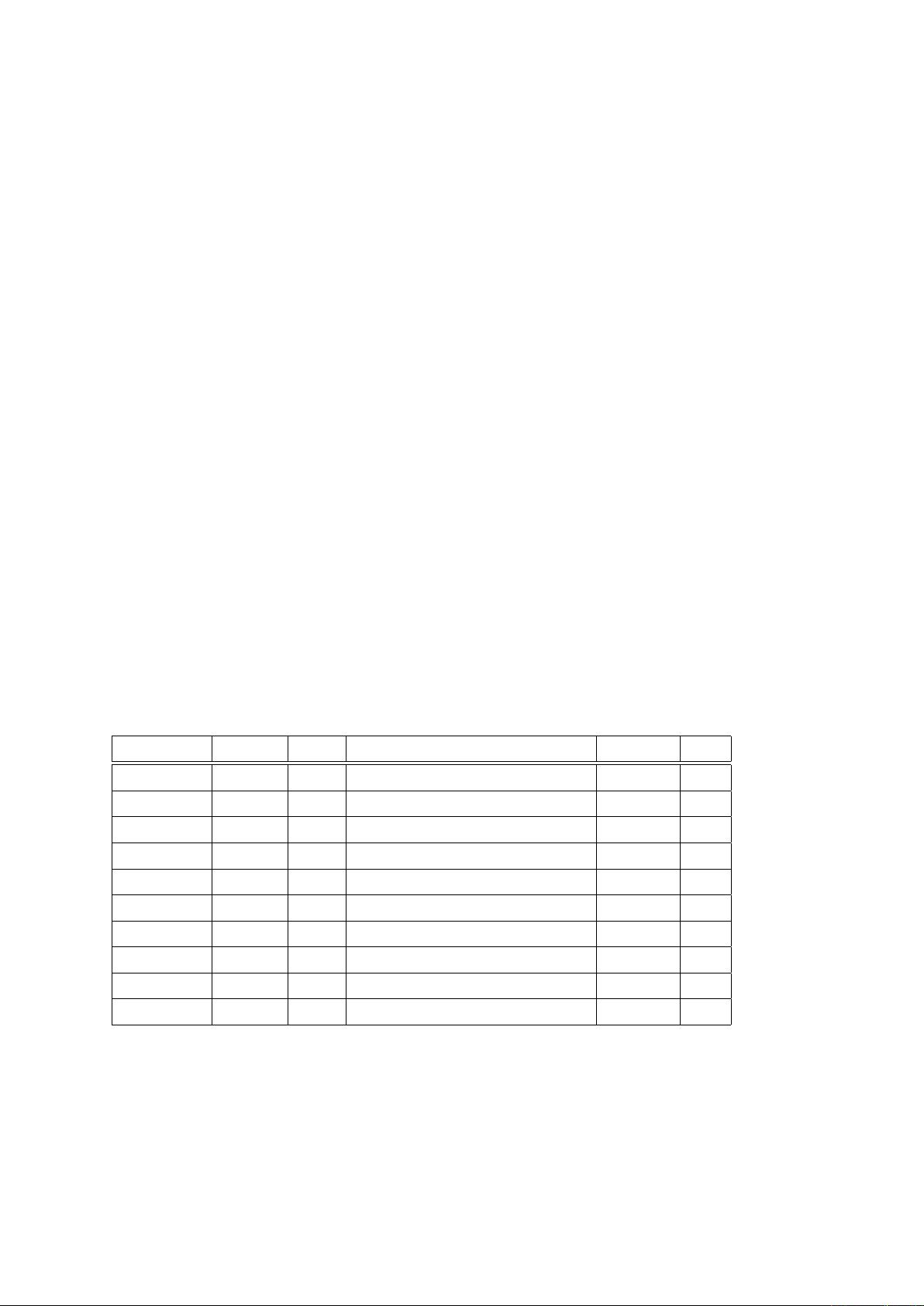
3.11 测量值用途汇总
测量值 符号 单位 来源 最小频率 用途
角速度 ω rad
/
s IMU 100Hz 预测
加速度 a m/s
2
IMU 100Hz 预测
地球磁场 M
meas
gauss 磁力计 5Hz 校正
距地高度 hagl m GPS/气压计/测距仪/外部视觉 5Hz 校正
速度测量 V
meas
m/s GPS/(光流 + 测距仪)/外部视觉 5Hz 校正
位置测量 P
meas
m GPS/外部视觉 5Hz 校正
偏航角测量 ψ rad GPS/磁力计/外部视觉 5Hz 校正
等效空速 airspeed m/s 空速传感器 校正
合成侧滑 beta rad 虚拟 校正
阻力比力 drag 虚拟 校正
根据前面的描述可知:
• ECL EKF2 最小传感器集合为:IMU,偏航数据源和高度数据源。
• 机体的姿态变化由角速度驱动,速度变化由加速度驱动,这两者由 IMU 提供。
• 偏航测量值校正了在 xy 水平面上姿态,高度测量值校正了 z 轴上的位置。有了这两者才能执
行最基本的自动导航功能。
剩余24页未读,继续阅读
2019-09-05 上传
2019-01-09 上传
2023-06-09 上传
2023-06-25 上传
2023-05-18 上传
2023-03-29 上传
2023-07-14 上传
2023-08-19 上传

RobotLaw
- 粉丝: 7
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 多模态联合稀疏表示在视频目标跟踪中的应用
- Kubernetes资源管控与Gardener开源软件实践解析
- MPI集群监控与负载平衡策略
- 自动化PHP安全漏洞检测:静态代码分析与数据流方法
- 青苔数据CEO程永:技术生态与阿里云开放创新
- 制造业转型: HyperX引领企业上云策略
- 赵维五分享:航空工业电子采购上云实战与运维策略
- 单片机控制的LED点阵显示屏设计及其实现
- 驻云科技李俊涛:AI驱动的云上服务新趋势与挑战
- 6LoWPAN物联网边界路由器:设计与实现
- 猩便利工程师仲小玉:Terraform云资源管理最佳实践与团队协作
- 类差分度改进的互信息特征选择提升文本分类性能
- VERITAS与阿里云合作的混合云转型与数据保护方案
- 云制造中的生产线仿真模型设计与虚拟化研究
- 汪洋在PostgresChina2018分享:高可用 PostgreSQL 工具与架构设计
- 2018 PostgresChina大会:阿里云时空引擎Ganos在PostgreSQL中的创新应用与多模型存储
