自动驾驶视觉技术:性能跃升与产业链影响
版权申诉
176 浏览量
更新于2024-07-19
收藏 2.18MB PDF 举报
“视觉在自动驾驶中的应用及地位.pdf”主要探讨了视觉技术在自动驾驶领域的关键角色,包括视觉传感器的性能提升、视觉处理硬件与软件的发展、车载视觉方案的商业化挑战以及国内算法企业的机遇与问题。
自动驾驶是当前汽车行业的重要发展方向,而视觉技术作为其核心技术之一,扮演着至关重要的角色。视觉传感器,特别是摄像头,是自动驾驶系统获取环境信息的主要途径。随着技术的进步,下一代视觉传感器的性能将迎来显著提升,例如单目测距可达200米至300米,像素提升至2到8兆像素,这些改进使得视觉传感器在性能上接近长距离毫米波雷达,同时在成本和图像识别能力上更具优势。纯视觉的L4级自动驾驶方案已经在路测中取得成功,如百度的ApolloLite项目。
硬件方面,车规级高算力处理器,如英伟达的Drive Xavier、特斯拉的FSD和Mobileye的EyeQ5等,为深度学习算法在自动驾驶中的应用提供了基础。这些硬件的进步推动了计算机视觉算法的革新,深度学习有望超越传统的计算机视觉算法。然而,车载软件的研发要求更高,周期更长,对消费级软件企业的进入构成了一定挑战。
在商业化进程中,车载视觉方案的软件通用性和上下游合作关系至关重要。车体视觉因为涉及到车辆控制层面,其封闭性强,算法移植难度大。相比之下,车舱视觉软件的通用性更强,能够适应多种硬件平台和操作系统,这使得软件公司在供应链中具有相对更高的议价权。目前,头部一级供应商往往与专业算法公司深度合作,并有可能发展自己的算法研发能力,使得一级和二级供应商之间的界限变得模糊。
对于国内的算法企业来说,虽然面临上下游议价权较弱、汽车工业技术标准经验不足等问题,但也有着发展的机遇。例如,提升软件的通用性以适应更多应用场景,以及在深度学习等新兴算法领域的创新。然而,商业化应用的规模化落地仍存在不确定性,需警惕这些风险。
视觉技术在自动驾驶中的地位日益凸显,伴随着技术进步和产业合作的深化,视觉解决方案将在自动驾驶领域发挥更大作用。同时,国内企业需要克服挑战,抓住机遇,提升自身竞争力,以在这一快速发展的行业中占据一席之地。
识别风险,发现价值 请务必阅读末页的免责声明
10 / 59
[Table_PageText]
深度分析|计算机
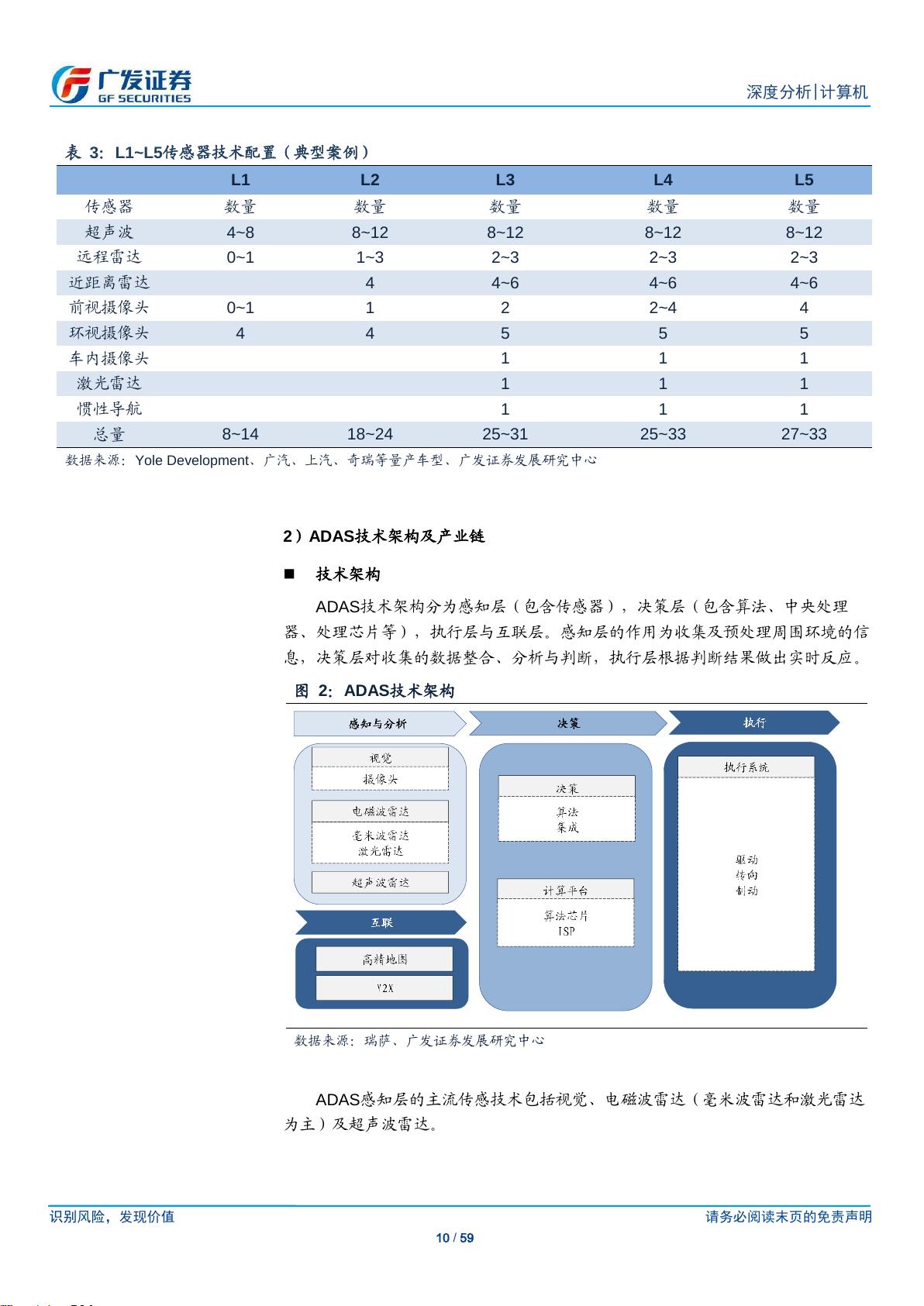
表 3:L1~L5传感器技术配置(典型案例)
L1
L2
L3
L4
L5
传感器
数量
数量
数量
数量
数量
超声波
4~8
8~12
8~12
8~12
8~12
远程雷达
0~1
1~3
2~3
2~3
2~3
近距离雷达
4
4~6
4~6
4~6
前视摄像头
0~1
1
2
2~4
4
环视摄像头
4
4
5
5
5
车内摄像头
1
1
1
激光雷达
1
1
1
惯性导航
1
1
1
总量
8~14
18~24
25~31
25~33
27~33
数据来源:Yole Development、广汽、上汽、奇瑞等量产车型、广发证券发展研究中心
2)ADAS技术架构及产业链
技术架构
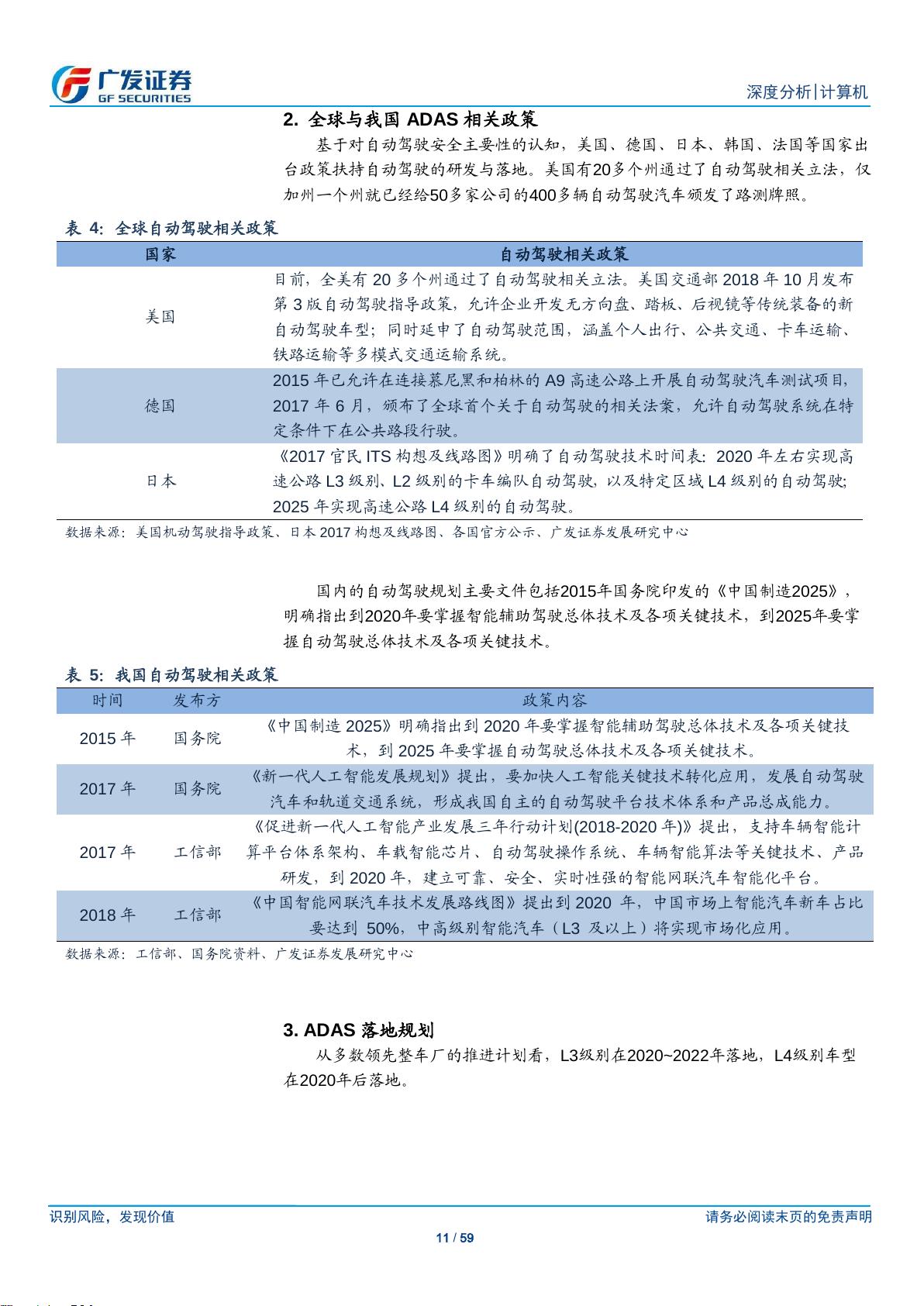
ADAS技术架构分为感知层(包含传感器),决策层(包含算法、中央处理
器、处理芯片等),执行层与互联层。感知层的作用为收集及预处理周围环境的信
息,决策层对收集的数据整合、分析与判断,执行层根据判断结果做出实时反应。
图 2:ADAS技术架构
数据来源:瑞萨、广发证券发展研究中心
ADAS感知层的主流传感技术包括视觉、电磁波雷达(毫米波雷达和激光雷达
为主)及超声波雷达。
剩余58页未读,继续阅读
2023-07-23 上传
2023-05-14 上传
2023-06-19 上传
2023-09-10 上传
2023-07-01 上传
2023-08-29 上传
2023-04-12 上传
2023-11-18 上传
2023-09-06 上传

电动汽车控制与安全
- 粉丝: 263
- 资源: 4186
 我的内容管理
展开
我的内容管理
展开







最新资源
- AirKiss技术详解:无线传递信息与智能家居连接
- Hibernate主键生成策略详解
- 操作系统实验:位示图法管理磁盘空闲空间
- JSON详解:数据交换的主流格式
- Win7安装Ubuntu双系统详细指南
- FPGA内部结构与工作原理探索
- 信用评分模型解析:WOE、IV与ROC
- 使用LVS+Keepalived构建高可用负载均衡集群
- 微信小程序驱动餐饮与服装业创新转型:便捷管理与低成本优势
- 机器学习入门指南:从基础到进阶
- 解决Win7 IIS配置错误500.22与0x80070032
- SQL-DFS:优化HDFS小文件存储的解决方案
- Hadoop、Hbase、Spark环境部署与主机配置详解
- Kisso:加密会话Cookie实现的单点登录SSO
- OpenCV读取与拼接多幅图像教程
- QT实战:轻松生成与解析JSON数据
