优化局部图像描述子的判别学习方法
需积分: 13 40 浏览量
更新于2024-07-21
收藏 5.34MB PDF 举报
"这篇论文探讨了从训练数据中学习局部图像特征的方法。研究中提出了一组构建图像描述符的基础模块,这些模块可以组合并联合优化,以最小化最近邻分类器的错误。论文考虑了线性和非线性变换,以及降维技术,并利用线性判别分析(LDA)和鲍威尔最小化等判别学习技术来求解参数。通过这些技术,获得了在低维度下超越现有最优性能的描述符。除了新的实验和特征学习建议外,还提供了一个基于多视图立体数据的新而真实的地面实况数据集。关键词包括:图像特征、局部特征、判别学习、SIFT。"
在计算机视觉领域,局部图像特征匹配已成为识别和注册任务的核心方法。传统的局部特征如SIFT(尺度不变特征变换)虽然表现出色,但通常依赖于手工设计,而这篇论文则关注于从数据中学习这些特征。作者提出了一个框架,允许构建可组合和优化的描述符模块,这是对经典特征提取方法的重要改进。
判别学习是论文中的核心概念,它不同于传统的生成模型,更专注于直接优化分类或回归任务的性能。在这里,线性判别分析(LDA)被用于寻找最佳投影方向,使得不同类别的样本在新空间中的分离度最大化。同时,鲍威尔最小化算法用于求解非线性问题的参数,这种优化方法对于处理复杂模型和非凸优化问题特别有用。
通过这些学习策略,论文能够获得在保持低维度表示的同时,仍能超越当前最佳性能的图像描述符。低维度意味着更高效的存储和计算,这对于大规模图像处理任务尤其重要。此外,论文提供的新数据集为多视图立体数据,这为研究人员提供了更加真实和具有挑战性的环境来测试和验证新的局部特征学习方法。
论文的贡献不仅仅是新的算法和理论,还包括对特征学习的实践建议,以及一个宝贵的、基于现实场景的数据集。这将促进后续研究的发展,推动局部特征领域进一步向前,特别是在3D重建、图像配准、目标识别等领域有着广泛的应用潜力。这项工作为提高图像分析的准确性和效率提供了新的途径,对于推动计算机视觉领域的进步具有重要意义。
Certain of these algorithmic combinations give rise to
published descriptors, but many are untested. Using this
structure allows us to examine the contribution of each
building block in detail and obtain a better covering of the
space of possible algorithms.
Our approach to learning descriptors is therefore to put
together a combination of building blocks and then optimize
the parameters of these blocks using learning to obtain the
best match/no-match classification performance. This con-
trasts with prior attempts to hand tune descriptor para-
meters and helps to put each algorithm on the same footing
so that we can obtain and compare best performances.
Fig. 3 shows the overall learning framework for building
robust local image descriptors. The input is a set of image
patches which may be extracted from the neighborhood of
any interest point detector. The processing stages consist of
the following:
. G-block: Gaussian smoothing is applied to the input
patch.
. T-blocks: We perform a range of nonlinear trans-
formations to the smoothed patch. These include
operations such as angle-quantized gradients and
rectified steerable filters, and typically resemble the
“simple-cell” stage in human visual processing.
. S-blocks/E-blocks: We perform spatial pooling of
the above filter responses. S-blocks use parametrized
pooling regions, E-blocks are nonparametric. This
stage resembles the “complex-cell” operations in
visual processing.
. N-blocks: We normalize the output patch to account
for photometric variations. This stage may option-
ally be followed by another E-block to reduce the
number of dimensions at the output.
In general, the T-block stage extracts useful features from
the data like edge or local frequency information and the
S-block stage pools these features locally to make the
representation insensitive to positional shift. These stages
are similar to the simple/complex cells in the human visual
cortex [36]. It’s important that the T-block stage introduces
some nonlinearity, otherwise the smoothing step amounts
to simply blurring the image. Also, the N-block normal-
ization is critical, as many factors such as lighting,
reflectance, and camera response have a large effect on
the actual pixel values.
These processing stages have been combined into three
different pipelines, as shown in the figure. Each stage has
trainable parameters which are learned using our ground
truth data set of match/nonmatch pairs. In the remainder of
this section, we will take a more detailed look at the
parametrization of each of these building blocks.
3.1 Presmoothing (G-Block)
We smooth the image pixels using a Gaussian kernel of
standard deviation
s
as a preprocessing stage to allow the
descriptor to adapt to an appropriate scale relative to the
BROWN ET AL.: DISCRIMINATIVE LEARNING OF LOCAL IMAGE DESCRIPTORS 45
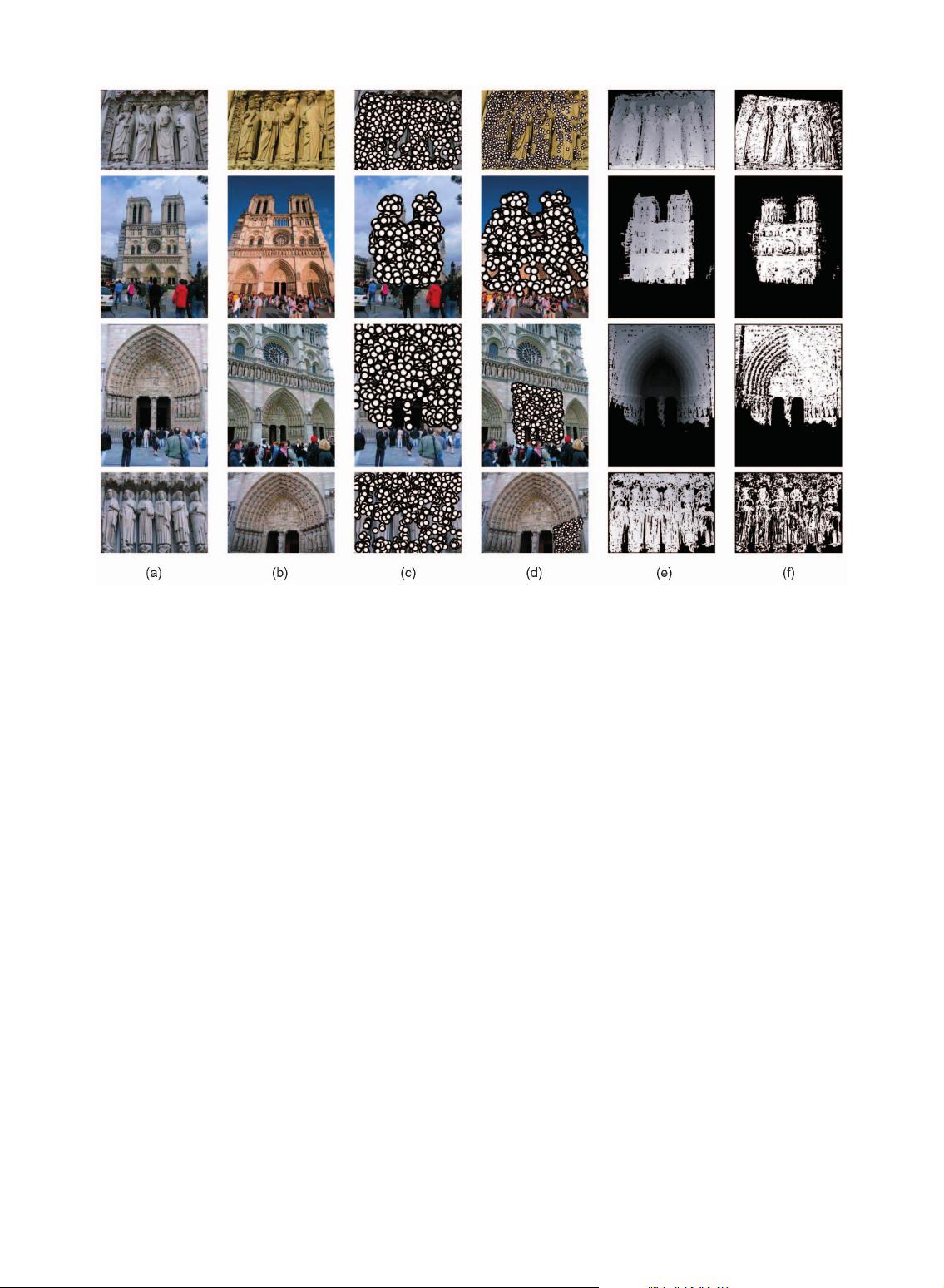
Fig. 1. Generating ground truth correspondences. To generate the ground truth image correspondences needed as input to our algorithms, we use
multiview stereo data provided by Goesele et al. [30]. Interest points are detected in the reference image and transferred to each neighboring
image via the depth map. If the projected point is visible, we look for interest points within a specified range of position, orientation, and scale, and
declare these to be matches. Points lying outside of twice this range are declared to be nonmatches. This is the basic input to our learning
algorithms. (a)-(f) Reference image, neighbor image, reference matches, neighbor matches, depth map, and visibility map, respectively.
剩余14页未读,继续阅读
2021-01-07 上传
2023-06-04 上传
2023-04-06 上传
2023-04-12 上传
2023-03-16 上传
2023-05-20 上传
2023-06-04 上传
2023-05-29 上传
2023-03-31 上传

u010453586
- 粉丝: 0
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 构建Cadence PSpice仿真模型库教程
- VMware 10.0安装指南:步骤详解与网络、文件共享解决方案
- 中国互联网20周年必读:影响行业的100本经典书籍
- SQL Server 2000 Analysis Services的经典MDX查询示例
- VC6.0 MFC操作Excel教程:亲测Win7下的应用与保存技巧
- 使用Python NetworkX处理网络图
- 科技驱动:计算机控制技术的革新与应用
- MF-1型机器人硬件与robobasic编程详解
- ADC性能指标解析:超越位数、SNR和谐波
- 通用示波器改造为逻辑分析仪:0-1字符显示与电路设计
- C++实现TCP控制台客户端
- SOA架构下ESB在卷烟厂的信息整合与决策支持
- 三维人脸识别:技术进展与应用解析
- 单张人脸图像的眼镜边框自动去除方法
- C语言绘制图形:余弦曲线与正弦函数示例
- Matlab 文件操作入门:fopen、fclose、fprintf、fscanf 等函数使用详解
