六自由度并联机器人:球形关节奇异性分析与计算方法
版权申诉
200 浏览量
更新于2024-06-23
收藏 5.4MB DOC 举报
本文主要探讨了六自由度并联机器人的奇异性问题,尤其是在每条腿上配备球形关节的情况下。这种机器人设计的特殊性导致了与传统串联机器人不同的行为,尽管并联机器人在奇异配置下可能失去某些自由度,但它们仍然存在可操作的空间。作者关注的是正运动学奇异性,即在正常操作条件下出现的奇异状态。
研究首先从确定致动器螺丝在腿链中心位置开始,这是理解机器人运动的关键。接下来,作者运用凯莱代数(Grassmann-Cayley algebra)和相关分解技术来识别那些包含致动器螺丝的导数(或刚度矩阵)中的奇异条件。这些工具的优势在于,它们能够简化几何实体的表示,使得对几何解释的奇异条件分析更加直观和便捷。
通过这些工具,研究者发现了一种组合方式,至少有144种奇异性配置出现在四个相互交错的平面上。这四个平面由零距螺丝球形关节的位置和方向定义。值得一提的是,作者提到之前的研究主要集中在具有七个连杆的普利姆结构上,而本文则扩展到了具有球形关节的三条腿机器人,这是对现有研究的一个重要补充。
在分析过程中,作者特别关注了执行机构为线性且与零螺距螺杆相关的特殊情况。在这种情况下,通过几何方法可以找到奇异配置,比如依赖于致动器线性关系的解决方案。文章还强调了利用代数方程和几何意义相结合的方法,可以直接和高效地解析出奇异配置,这是本文的核心技术之一。
本文通过对六自由度并联机器人中特定类型(三条腿,球形关节)的奇异点分析,提供了新的理解和处理策略,对于提升并联机器人设计的稳定性和路径规划具有重要意义。通过数学工具如凯莱代数和几何方法的结合,作者成功揭示了这一复杂系统中的奇异行为,并为进一步优化机器人性能奠定了基础。
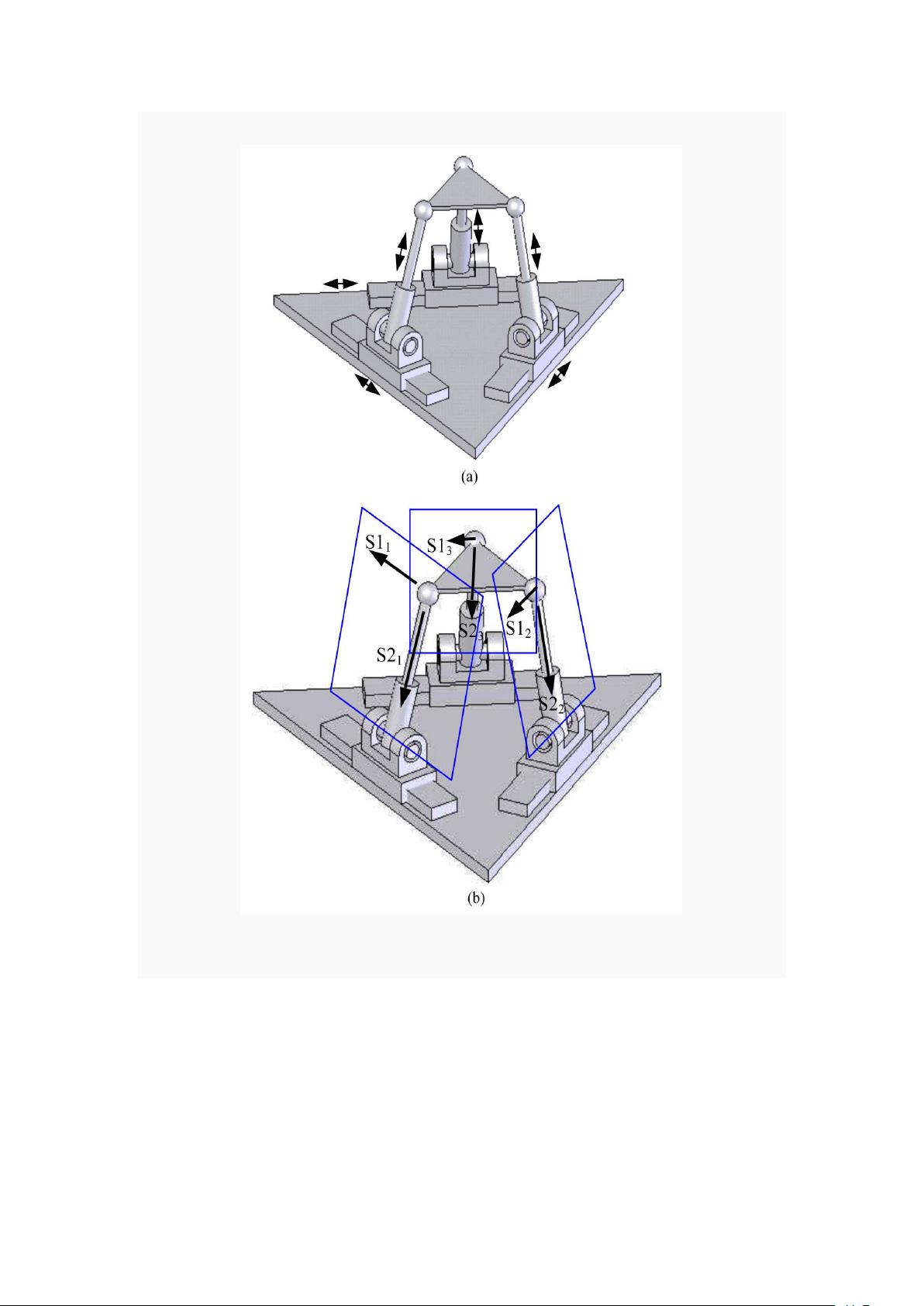
图3 (a)3-PRPS 机器人提出 Behi[61]
(b)飞机和致动器螺丝
剩余18页未读,继续阅读
2023-06-03 上传
2023-05-28 上传
2023-07-14 上传
2023-03-27 上传
2023-12-15 上传
2023-05-17 上传
2023-07-04 上传
2023-06-09 上传
2023-06-01 上传

老帽爬新坡
- 粉丝: 92
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 磁性吸附笔筒设计创新,行业文档精选
- Java Swing实现的俄罗斯方块游戏代码分享
- 骨折生长的二维与三维模型比较分析
- 水彩花卉与羽毛无缝背景矢量素材
- 设计一种高效的袋料分离装置
- 探索4.20图包.zip的奥秘
- RabbitMQ 3.7.x延时消息交换插件安装与操作指南
- 解决NLTK下载停用词失败的问题
- 多系统平台的并行处理技术研究
- Jekyll项目实战:网页设计作业的入门练习
- discord.js v13按钮分页包实现教程与应用
- SpringBoot与Uniapp结合开发短视频APP实战教程
- Tensorflow学习笔记深度解析:人工智能实践指南
- 无服务器部署管理器:防止错误部署AWS帐户
- 医疗图标矢量素材合集:扁平风格16图标(PNG/EPS/PSD)
- 人工智能基础课程汇报PPT模板下载
