"本资源是一份关于机器人正逆运动学的60页PPT,主要讲解了机器人正向运动学的概念和D-H(Denavit-Hartenberg)表示法,旨在帮助学习者理解D-H法的原理并掌握如何用该方法对机器人进行建模。"
在机器人领域,正向运动学是指通过已知各个关节的角度或位置,来计算出末端执行器在固定坐标系中的位置和姿态的过程。在 §1.4 中,我们深入探讨了这个主题。工业机器人的正向运动学涉及到以下几个关键步骤:
1. **相对杆件的坐标系确定**:在构建机器人的运动模型时,首先要为每个关节设定一个参考坐标系。这个坐标系的选择对于后续的计算至关重要。
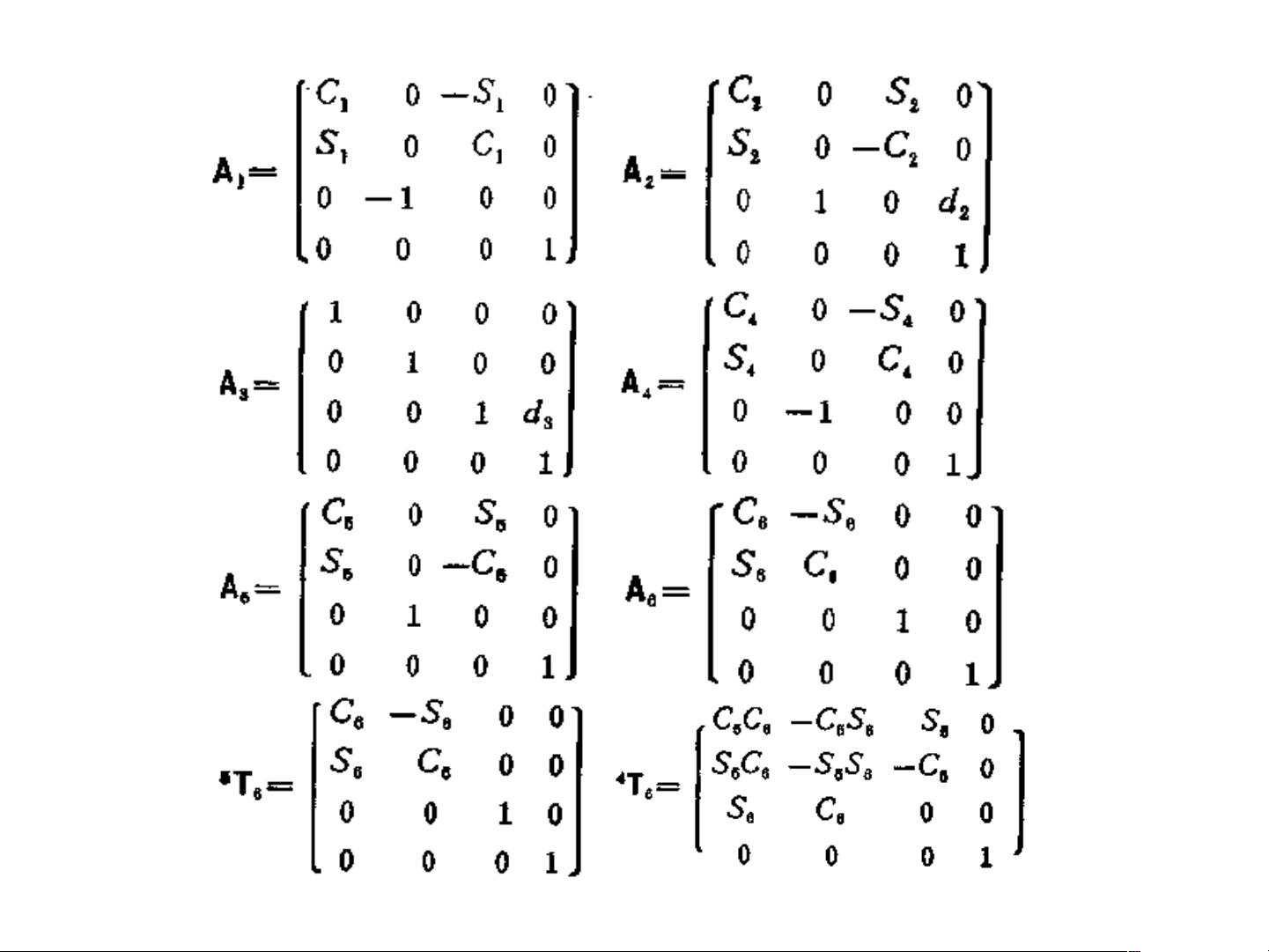
2. **建立各连杆的模型矩阵A**:通过一系列坐标变换,可以构建出描述每个连杆运动的模型矩阵A。这些矩阵反映了关节之间的相对位置和旋转。
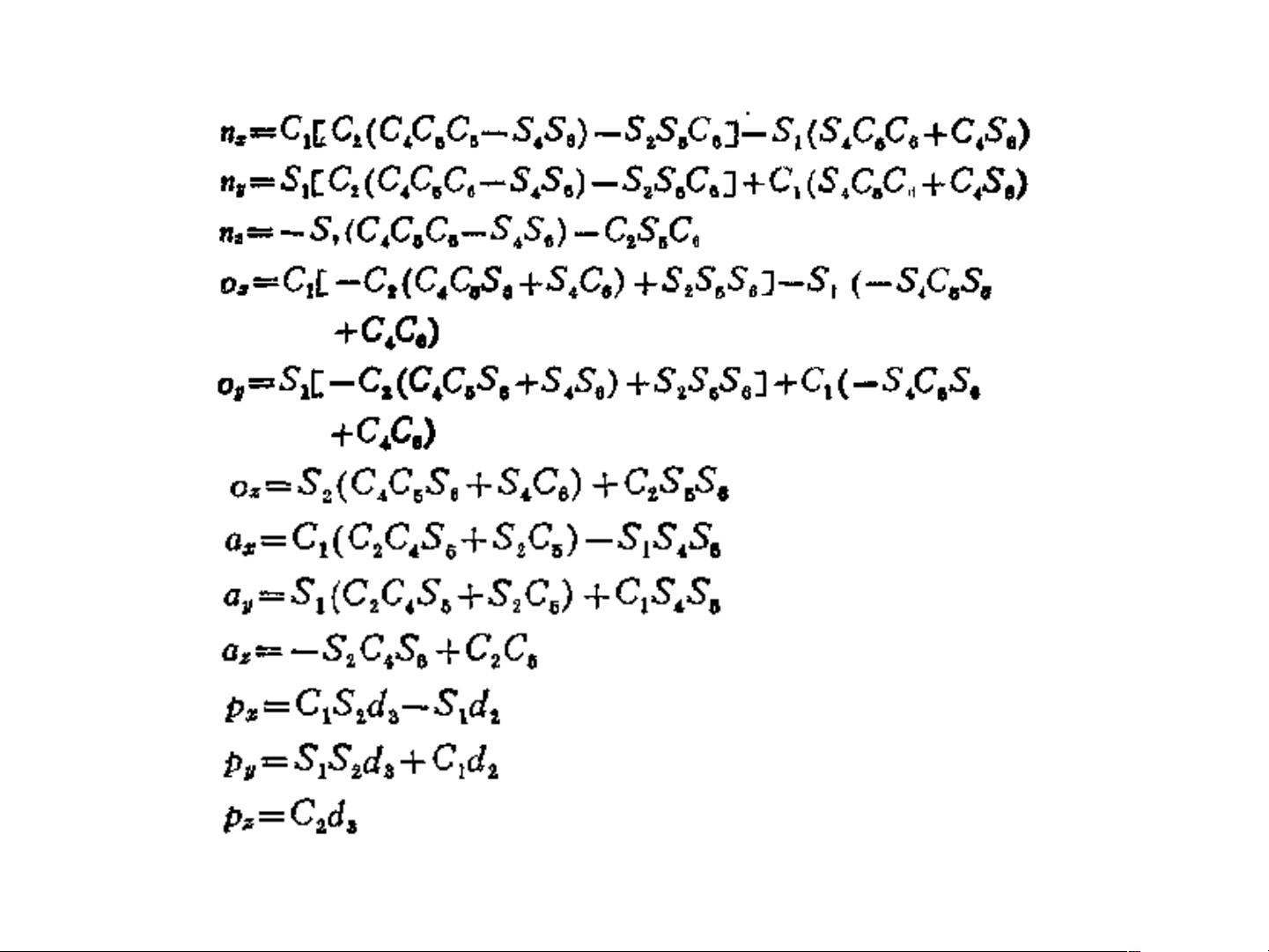
3. **正运动学算法**:利用D-H参数,我们可以构建出描述机器人运动的数学方程,通过这些方程可以计算出末端执行器的位姿。
D-H表示法是由Denavit和Hartenberg在1955年提出的,它是机器人建模的标准方法之一。这种方法的核心思想包括:
- **关节坐标系的指定**:从第一个关节(关节n)开始,按照顺序为每个关节指定坐标系,直到最后一个关节(通常为末端执行器)。
- **Z轴的确定**:旋转关节的Z轴沿关节旋转方向,滑动关节的Z轴沿滑动方向,且关节变量对应Z轴的位移。
- **X轴的确定**:依据两关节Z轴的关系,选取合适的X轴方向,确保形成右手坐标系。
- **Y轴的确定**:Y轴由X轴和Z轴的叉积决定,保持右手坐标系的规则。
- **变量选择**:D-H参数包括θ、d、a和α,其中θ和d通常作为关节变量,表示旋转角度和沿Z轴的滑动距离,而a和α则用来描述关节间的相对位置。
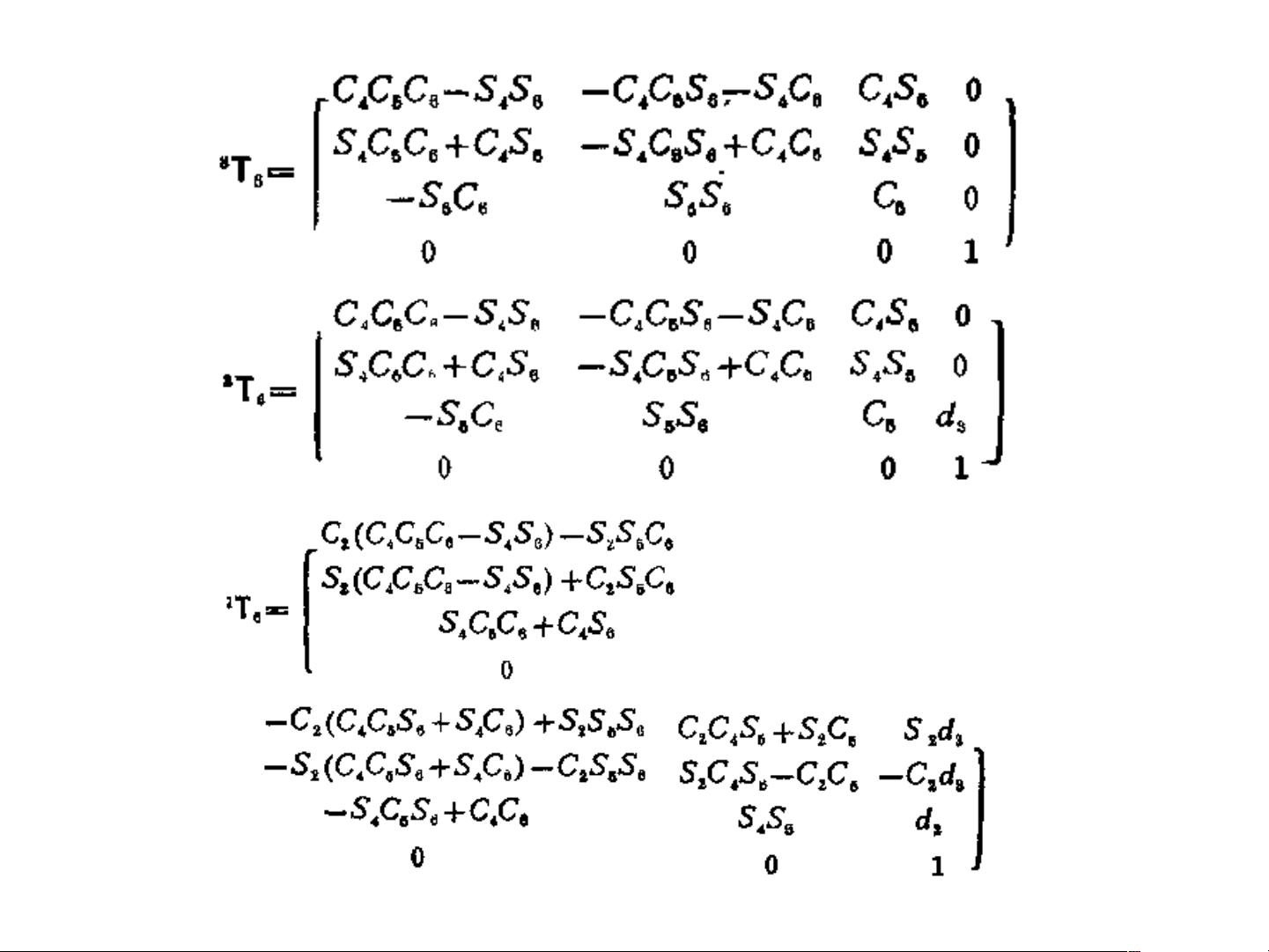
通过以上规则,可以构建D-H参数表,并据此计算出关节坐标系之间的转换矩阵。最终,所有转换矩阵相乘得到的总变换矩阵将指示出从基座到末端执行器的位姿。
以斯坦福机器人为例,它的六个关节中,前两个是旋转关节,第三个是滑动关节,最后三个是旋转关节。根据D-H法,可以逐步建立每个关节的坐标系,并计算出其对应的模型矩阵,进而求得整个机器人的正向运动学方程。
这份PPT详细介绍了机器人正向运动学和D-H表示法,是学习机器人运动控制和建模的重要参考资料。通过学习,不仅可以理解D-H法的基本原理,还能掌握如何实际运用这种方法解决机器人运动学问题。


 我的内容管理
展开
我的内容管理
展开









