汕头职院六足蜘蛛救援机器人实训:创新与应用
版权申诉
63 浏览量
更新于2024-06-28
收藏 2.47MB PPT 举报
"蜘蛛机器人实训.ppt"是一个关于六足蜘蛛救援机器人的实操项目,该作品由汕头职业技术学院的学生或团队完成。课程内容包括多个关键部分:
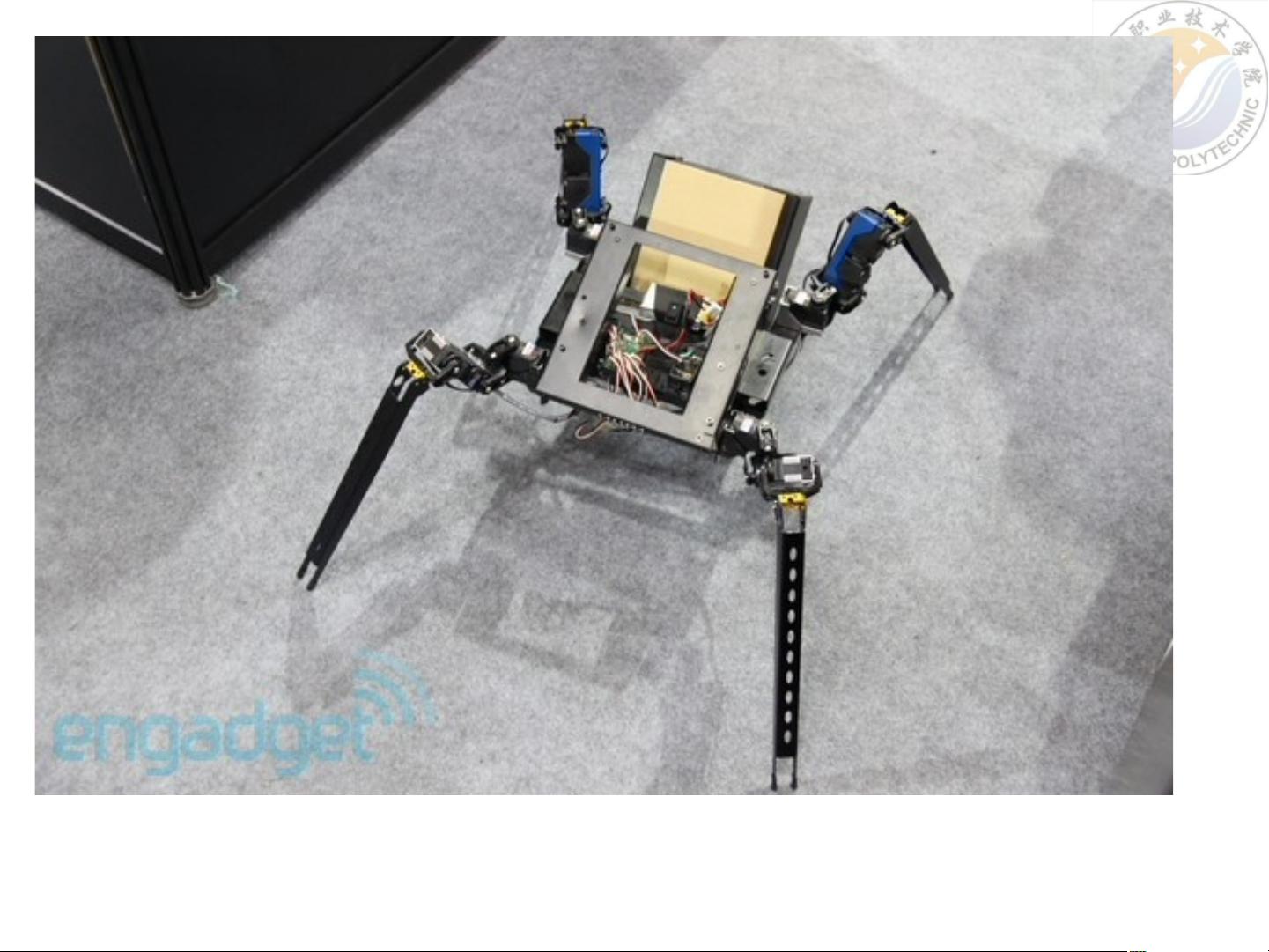
1. 六足蜘蛛救援机器人简介:此款机器人采用智能化多足步进式设计,具备强大的适应性和稳定性。它利用光敏和障碍物传感器,可根据环境光线调整方向,模拟自主反应能力,如避开障碍物并找到灭火目标。其动力系统依赖伺服电动机舵机,提供高效且节能的动力,配合单片机控制电路,实现复杂控制功能。
2. 机械系统及动力设计:整体机械结构设计考虑到救援场景的多样性和挑战性,如能在各种地形(如斜坡、山地、瓦砾堆)上移动,甚至攀爬楼梯和破碎玻璃。舵机采用PWM信号精确控制角度,内置减速齿轮确保扭矩和保持力充足,而且整个机器人的重量被优化至大约60克。
3. 成本计算与制作:课程可能还涵盖了制作成本的分析,包括材料费用、劳动力和可能的原型开发成本,这对于理解实际项目的经济可行性至关重要。
4. 作品演示:通过展示作品的实际操作,学生可以展示机器人的功能和性能,这可能是教学过程中的一个重要环节,旨在让学生将理论知识转化为实践技能。
5. 创新点:除了基本的功能,该作品的创新之处在于其独特的前进阻力和光强分布传感器,以及针对复杂环境设计的智能化步进式车辆,使得机器人在救援任务中表现出其他传统机器人难以比拟的优势。
6. 应用前景:在救援工作中,这款机器人能够执行多种任务,如搜索被困人员、搬运物资、破坏障碍物,以及在危险环境中提供支持,显示了其在现代救援技术中的潜在价值。
这个实训项目不仅涵盖了机器人技术的多个方面,如机械工程、电子控制、材料选择等,还着重强调了实际应用中的创新思维和问题解决能力。通过这个项目,学生能够深入了解并掌握机器人设计和应用的核心原理。
汕头职业技术学院
剩余27页未读,继续阅读
2023-10-09 上传
2023-03-31 上传
2023-05-20 上传
2023-06-10 上传
2023-10-10 上传
2023-06-10 上传
2023-07-17 上传

猫一样的女子245
- 粉丝: 175
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- AirKiss技术详解:无线传递信息与智能家居连接
- Hibernate主键生成策略详解
- 操作系统实验:位示图法管理磁盘空闲空间
- JSON详解:数据交换的主流格式
- Win7安装Ubuntu双系统详细指南
- FPGA内部结构与工作原理探索
- 信用评分模型解析:WOE、IV与ROC
- 使用LVS+Keepalived构建高可用负载均衡集群
- 微信小程序驱动餐饮与服装业创新转型:便捷管理与低成本优势
- 机器学习入门指南:从基础到进阶
- 解决Win7 IIS配置错误500.22与0x80070032
- SQL-DFS:优化HDFS小文件存储的解决方案
- Hadoop、Hbase、Spark环境部署与主机配置详解
- Kisso:加密会话Cookie实现的单点登录SSO
- OpenCV读取与拼接多幅图像教程
- QT实战:轻松生成与解析JSON数据
