多自主水下机器人路径规划与编队控制综述
需积分: 9 185 浏览量
更新于2024-07-09
收藏 1.76MB PDF 举报
"这篇论文回顾了多自主水下车辆(AUV)的路径规划和编队控制技术。路径规划和编队控制是多车辆系统,尤其是AUV中的关键概念,它们的合作实施能实现期望的结果并提高任务成功的概率。由于AUV的非线性动力学和环境条件,其协同控制是一项挑战。尽管AUV应用的发展表明路径规划和编队控制研究的重要性,但与地面或空中自主车辆相比,这一领域的关注度相对较低,需要进一步探索。论文审查了AUV编队控制的不同结构,并讨论了其优点和挑战。"
在多自主水下车辆(AUV)领域,路径规划和编队控制是两个至关重要的技术。路径规划涉及如何设计和优化AUV的运动轨迹,使其能够有效地从起点到达终点,同时避免碰撞、障碍物以及考虑水下环境的影响,如水流、海底地形等。这通常需要高级的算法,如Dijkstra算法、A*搜索算法或者遗传算法等,以确保路径的有效性和安全性。
编队控制则关注多个AUV如何协同工作,形成特定的几何形状或阵型,以执行复杂的任务,如海洋调查、搜救操作或海底构造测绘。编队控制的优势在于可以扩展单个AUV的能力,通过合作完成个体难以达成的目标。编队策略包括集中式、分布式和混合式,每种都有其独特的优势和适用场景。集中式方法依赖一个中心控制器来协调所有AUV的动作,而分布式方法则允许每个AUV根据本地信息做出决策,更加鲁棒但可能复杂度较高。混合式策略结合了两者的优点,适用于大规模AUV群体的控制。
尽管AUV的路径规划和编队控制已经取得了一定的进步,但仍然面临诸多挑战。非线性动力学使得AUV的动态模型复杂,需要高级控制理论,如滑模控制、自适应控制等来处理。此外,水下通信的限制,如低带宽、高延迟和易受干扰,对协同控制提出了额外的难题。环境不确定性,如不可预测的水流和海洋条件,也增加了路径规划和编队控制的难度。
这篇论文通过回顾现有的研究成果,强调了在AUV领域进一步研究和开发路径规划和编队控制技术的必要性。未来的重点可能包括开发更高效、适应性强的路径规划算法,改进编队控制策略以应对不确定性和通信限制,以及融合感知、决策和控制的集成解决方案,以提高AUV在复杂海洋环境中的自主性和任务完成能力。
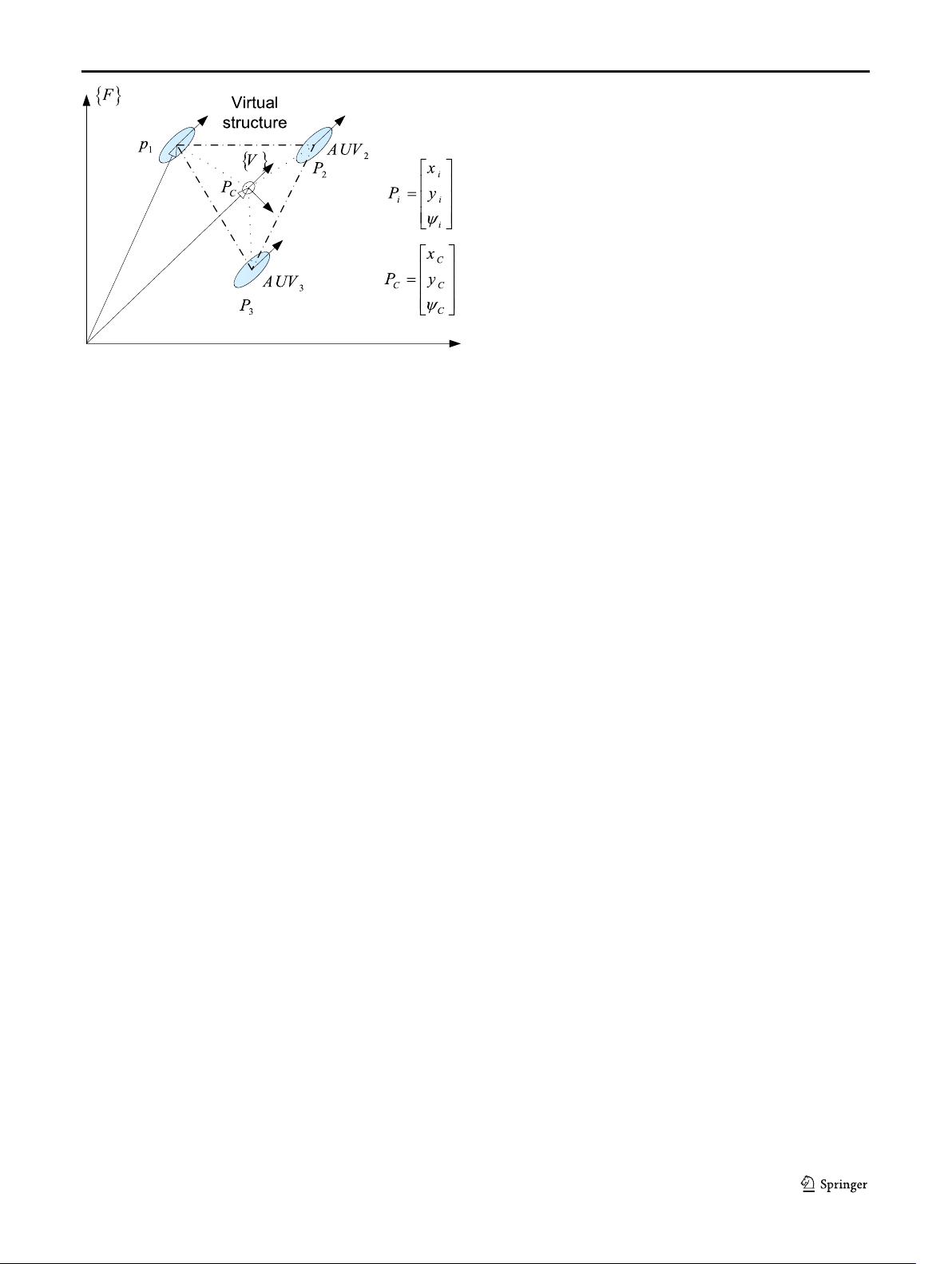
considered equal to the number of AUVs and one-
to-one correspond ence is established between
them. The desired formation is obtained by mini-
mizing the position error function, which is defined
based on the current position of the AUVs and their
desired position in the virtual structure.
Stepe 2: Converting the virtual structure’s desired motion
into desired commands for each of the AUVs in
the group: Having adjusted the desired virtual
structure, a virtual force is applied to the virtual
structure so that the structure can be moved to the
next point. In this section, the vehicle’smotionca-
pacity is taken into consideration.
Stepe 3: Designing an individual tracking controller for each
of the AUVs: After transferring the virtual structure
to the new position (done in Step 2), the control
inputs for each vehicle are designed in such a way
that the vehicle moves to its new corresponding
point in the virtual structure. A simple way for the
movement of vehicles to the desired position is
changing direction towards the desired position
and then transferring to the target point.
Virtual structure is usually used for formation control in
mobile robots, spacecraft [42–44] or small satellites [11,
45–47]. The employment of virtual structure approac h in
spacecraft formation control was presented in [48], where for-
mation feedback from the spacecraft to the virtual structure
was consulted. This would give robustness to the structure of
formation against internal or external disturbances and lead to
better performance. The control strategies of the distributed
virtual structure along with the corresponding coupling of
single-wheeled mobile robots are introduced in [49]. The cor-
responding coupling would create a trade-off between ensur-
ing the tracking of each robot’s desired trajectories and main-
taining the shape of the formation when faced with
disturbances, which can result in higher robustness of the pro-
posed formation structure. The exponential stability of the
dynamics of formation error is proven and the proposed con-
trol design is practically applied. In [50], the two-layer distrib-
uted formation learning control was presented for one group
of AUVs, which included an adaptive distributed observer in
the upper layer and a decentralized deterministic learning con-
troller in the lower layer. The upper layer estimates the virtual
leader’s states and dynamics. The formation tracking control
and learning performance of the neural network with local
information are done in the lower layer.
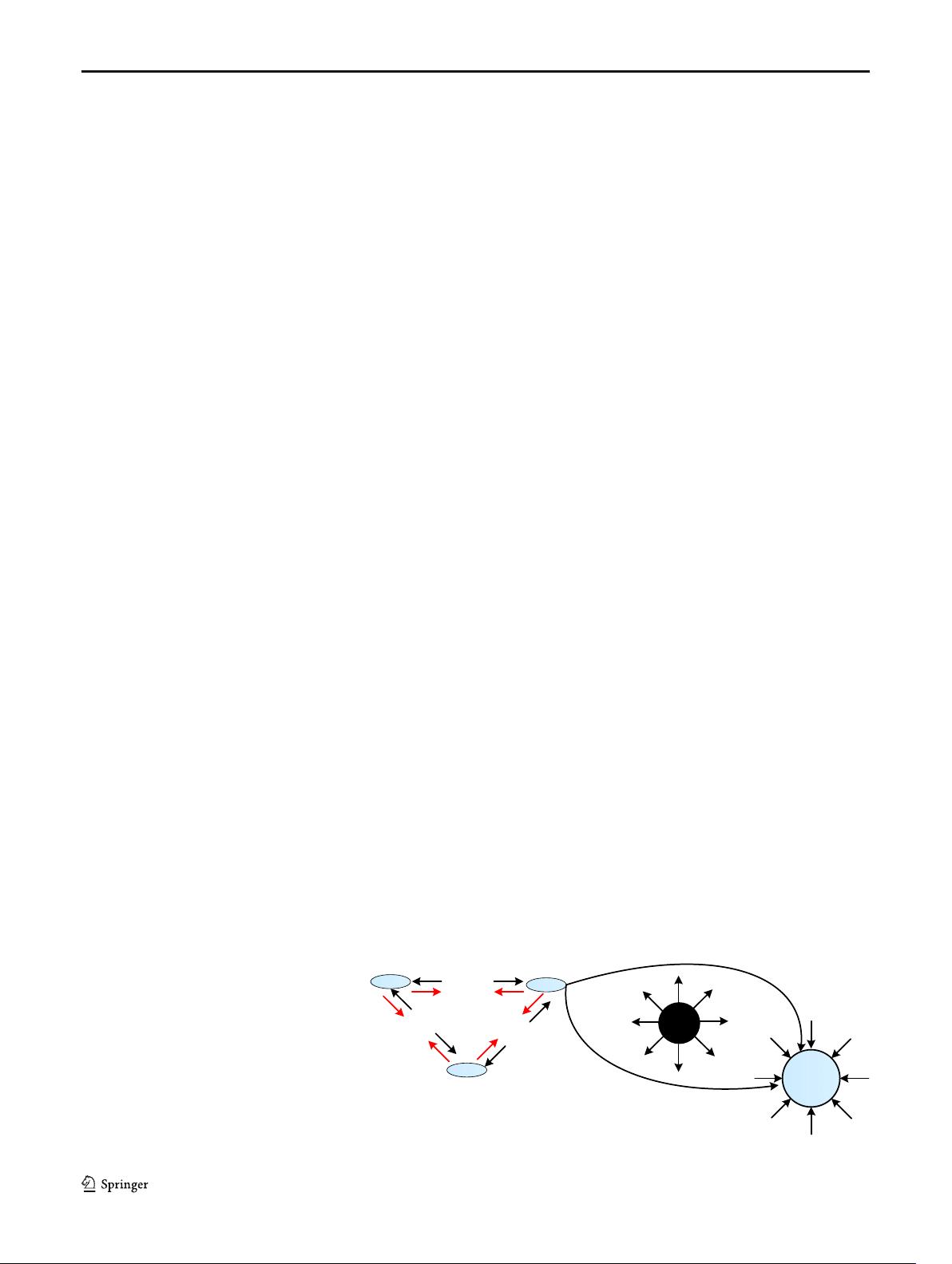
3.3 Formation Control Based on Behavioral Structure
Behavior-based formation control was first introduced by
Balch and Arkin in formation control [51]. This method uses
a weighted hybrid of different mission objectives in order to
generate vehicle control inputs. Generally, control targets in-
clude maintaining desired formation, moving towards the tar-
get, avoiding obstacle collisions, and avoiding inter-group
collisions. Each of the aforementioned items is prioritized
with different gains and the obtained average is given to each
vehicle as a control input. Meeting several control objectives
simultaneously is one of the benefits of this approach. It is,
however, hard to describe the dynamic of the group and guar-
antee the stability of the whole system, because the kinematic
and dynamic features of the vehicle are not taken into consid-
eration. The behavioral structure method is commonly applied
in combination with the artificial potential field method. In
[52], the formation control of a swarm of robots is considered
on the basis of the behavioral method for the generation of
formation and obstacles avoidance. To create an initial forma-
tion, the classification-based target searching algorithm is
used so that any arbitrary shape can be generated. Moreover,
the behavior-based approach is employed for moving in an
unknown obstacle-strewn environment. Based on the non-
linear dynamic systems theory, the distributed formation con-
trol and obstacle avoidance are presented in [53]. The desired
trajectories are gained based on the behavioral variables’ state
space. A combination of behavior-based formation approach
and artificial potential field is one of the most common
methods of formation control, which is also used for control-
ling a group of AUVs with simplified second-order dynamic
equation. The potential function for each vehicle is defined in
terms of goals, obstacles and formation structures and the
control law is designed based on Lyapunov’sdirectmethod.
This will ensure that the AUVs will effectively follow the goal
and avoid obstacles [54]. The combination of virtual and be-
havioral structures is the focal point of other studies conducted
on combining different methods of formation control. This
approach is used for the formation control of a group of mo-
bile robots. Each robot is modeled by an electric charge. Upon
defining the attraction forces, the robots would move towards
Fig. 4 The virtual structure including three vehicles
J Intell Robot Syst (2021) 101:
Page 5 of 26 67
剩余25页未读,继续阅读
2019-07-26 上传
2013-04-19 上传
2021-06-22 上传
2023-03-28 上传
2023-02-16 上传
2023-05-30 上传
2023-02-15 上传
2023-03-28 上传
2023-06-12 上传

m0_49306194
- 粉丝: 0
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 平尾装配工作平台运输支撑系统设计与应用
- MAX-MIN Ant System:用MATLAB解决旅行商问题
- Flutter状态管理新秀:sealed_flutter_bloc包整合seal_unions
- Pong²开源游戏:双人对战图形化的经典竞技体验
- jQuery spriteAnimator插件:创建精灵动画的利器
- 广播媒体对象传输方法与设备的技术分析
- MATLAB HDF5数据提取工具:深层结构化数据处理
- 适用于arm64的Valgrind交叉编译包发布
- 基于canvas和Java后端的小程序“飞翔的小鸟”完整示例
- 全面升级STM32F7 Discovery LCD BSP驱动程序
- React Router v4 入门教程与示例代码解析
- 下载OpenCV各版本安装包,全面覆盖2.4至4.5
- 手写笔画分割技术的新突破:智能分割方法与装置
- 基于Koplowitz & Bruckstein算法的MATLAB周长估计方法
- Modbus4j-3.0.3版本免费下载指南
- PoqetPresenter:Sharp Zaurus上的开源OpenOffice演示查看器
