SeisImager2D用户手册 v3.3:操作指南与功能详解
需积分: 50 9 浏览量
更新于2024-07-16
收藏 17.65MB PDF 举报
SeisImager2D是一款专业的二维地震数据分析软件,该手册提供了详细的中文操作指南,版本为3.3。该手册共分为多个章节,涵盖了软件的安装、模块功能以及各项操作步骤。以下是部分内容的详细介绍:
1. **章节介绍**:手册首先明确了软件名称和版本,以及其由GEOMETRICS公司开发,美国劳雷工业有限公司翻译。内容面向的是SeisImager2D用户,旨在帮助用户熟悉软件界面和功能。
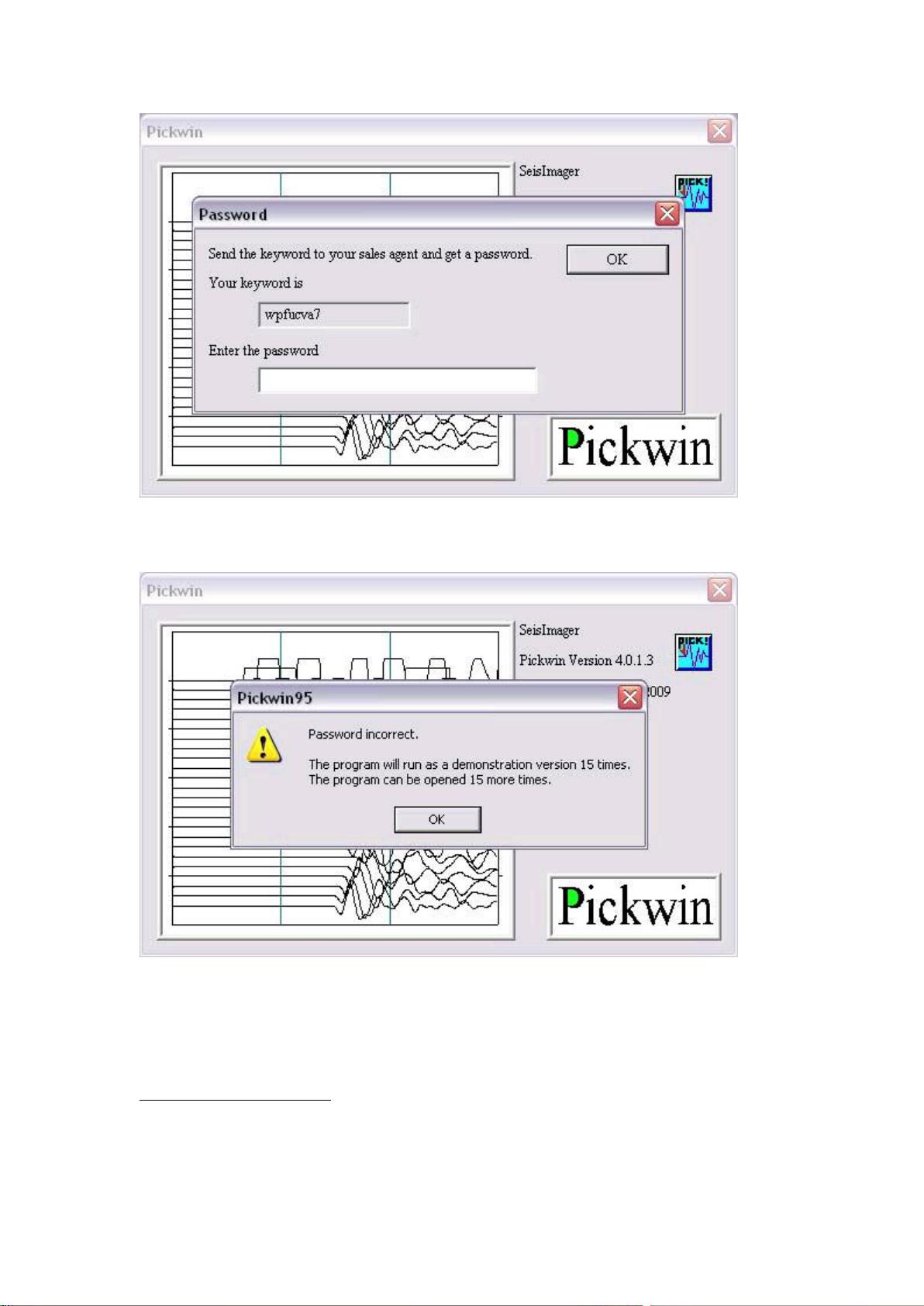
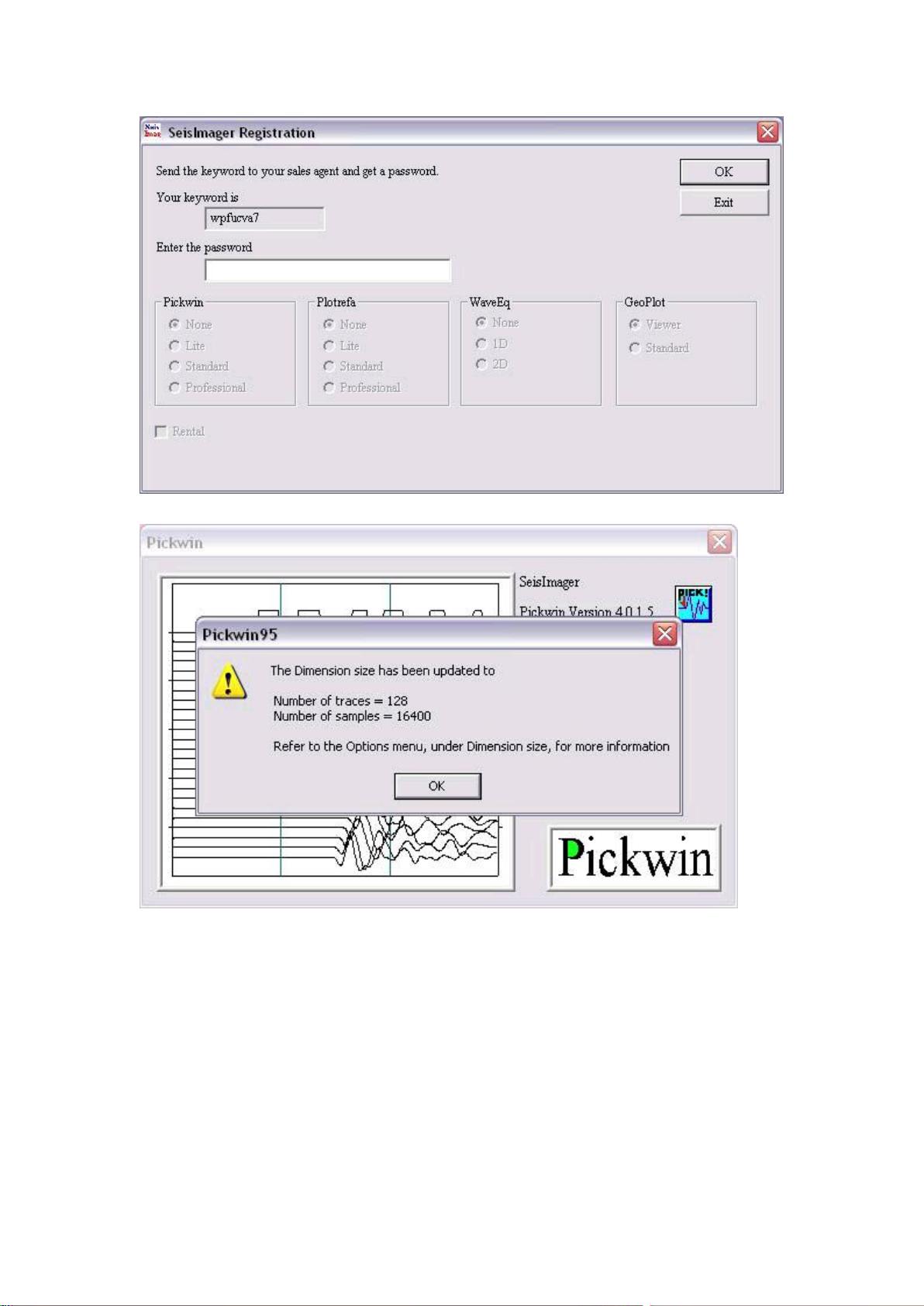
2. **软件安装**:在第二章,手册介绍了软件的安装流程,确保用户能够顺利将软件部署到他们的工作环境中。
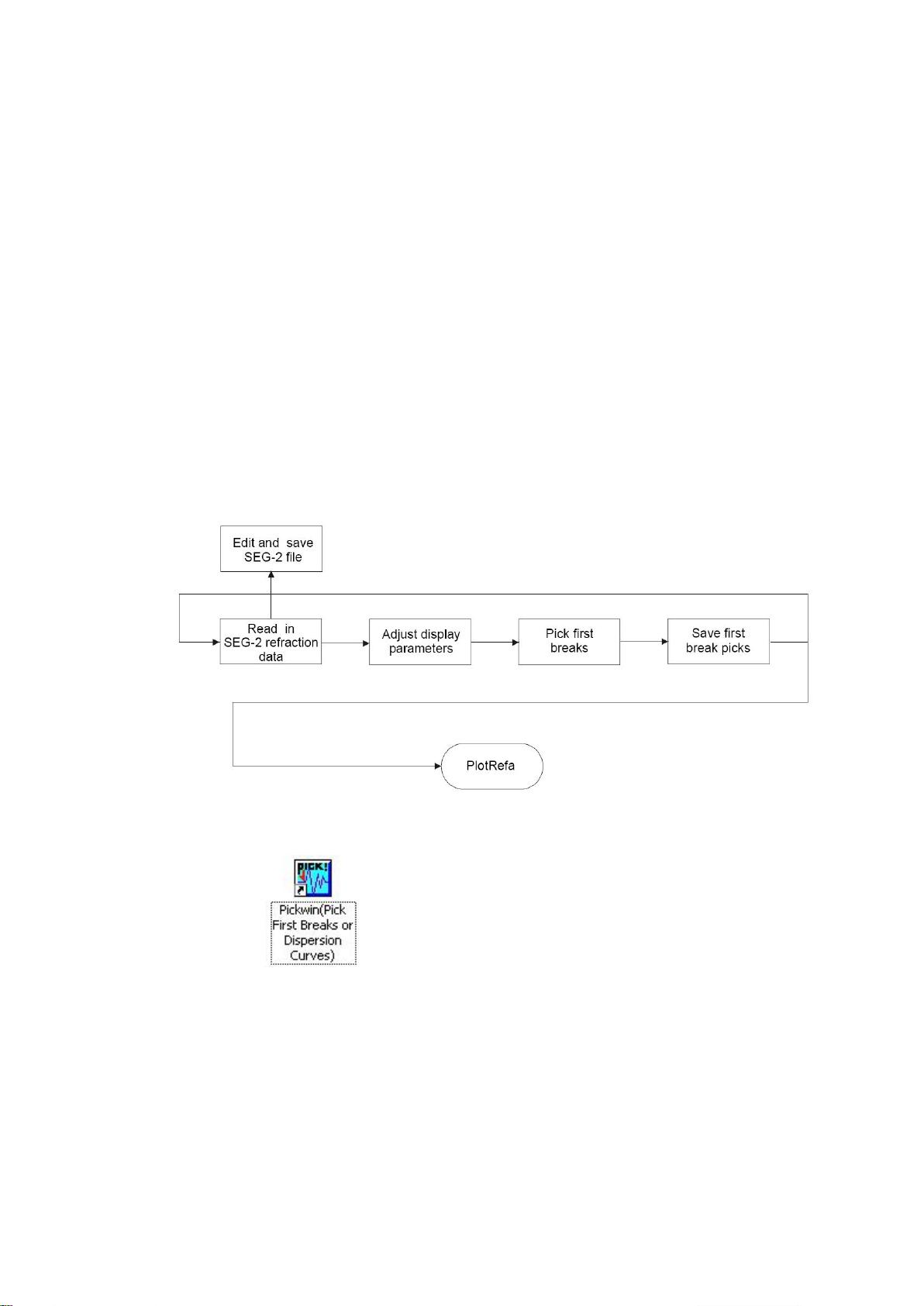
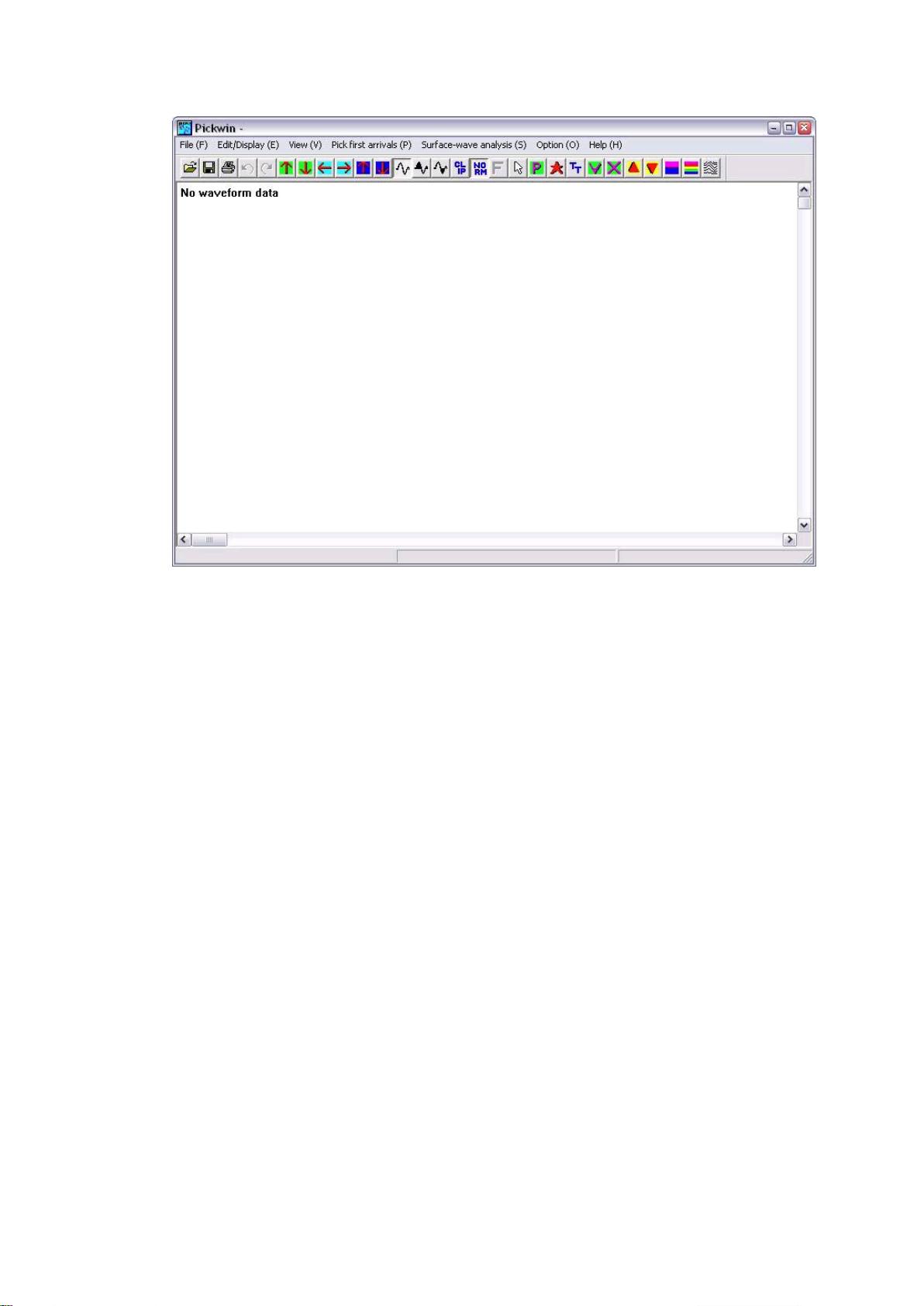
3. **Pickwin模块**:第三章专门讲解了Pickwin模块,这是用于首波拾取的关键工具。该部分列举了具体的操作命令,如打开和保存不同格式的地震数据文件(如SEG2、McSeis-3和OYO160MX),以及处理首波拾取文件的操作,包括撤销、恢复、选择地震道、移动和调整地震道等。
4. **编辑与显示菜单**:这部分详细阐述了如何进行地震道的编辑,包括时间偏移、移动、炮点修正、自动移动、S波修正、滤波、截断记录长度、重新采样、编辑震源位置等。同时,还包括地震道的显示设置,如归一化、消波、波形显示方式选择、旅行时间曲线展示、坐标轴设置以及预先触发偏移。
5. **首波拾取菜单**:用户可以使用PickFirstBreaks功能来精确地识别地震事件的首波,还有辅助工具如线性速度线和面波分析功能,有助于提高拾取的准确性和效率。
6. **选项菜单**:最后,手册还涉及软件的全局设置,如一般选项和自定义设置,这些可以帮助用户根据个人需求定制软件的行为和性能。
通过阅读这份手册,用户不仅可以掌握SeisImager2D的基础操作,还能深入了解各种高级功能和专业技巧,从而提高他们在地震数据分析领域的效率和精度。无论是初学者还是经验丰富的专业人士,都能从中获益良多。

2010-03-09 上传
2023-07-20 上传
2023-06-01 上传
2023-06-13 上传
2023-06-13 上传
2023-06-12 上传
2023-09-29 上传
2023-05-24 上传

zlhex
- 粉丝: 1
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机人脸表情动画技术发展综述
- 关系数据库的关键字搜索技术综述:模型、架构与未来趋势
- 迭代自适应逆滤波在语音情感识别中的应用
- 概念知识树在旅游领域智能分析中的应用
- 构建is-a层次与OWL本体集成:理论与算法
- 基于语义元的相似度计算方法研究:改进与有效性验证
- 网格梯度多密度聚类算法:去噪与高效聚类
- 网格服务工作流动态调度算法PGSWA研究
- 突发事件连锁反应网络模型与应急预警分析
- BA网络上的病毒营销与网站推广仿真研究
- 离散HSMM故障预测模型:有效提升系统状态预测
- 煤矿安全评价:信息融合与可拓理论的应用
- 多维度Petri网工作流模型MD_WFN:统一建模与应用研究
- 面向过程追踪的知识安全描述方法
- 基于收益的软件过程资源调度优化策略
- 多核环境下基于数据流Java的Web服务器优化实现提升性能
