A.Bemporad教授的模型预测控制课程讲义
需积分: 39 71 浏览量
更新于2024-07-19
12
收藏 21.36MB PDF 举报
"这是一份由著名专家Alberto Bemporad教授的‘Model Predictive Control’课程课件,涵盖了预测控制的基本概念、线性MPC、时间变易和非线性MPC、混合MPC以及随机MPC等内容,并提到了相关的MATLAB工具箱用于辅助学习和实践。"
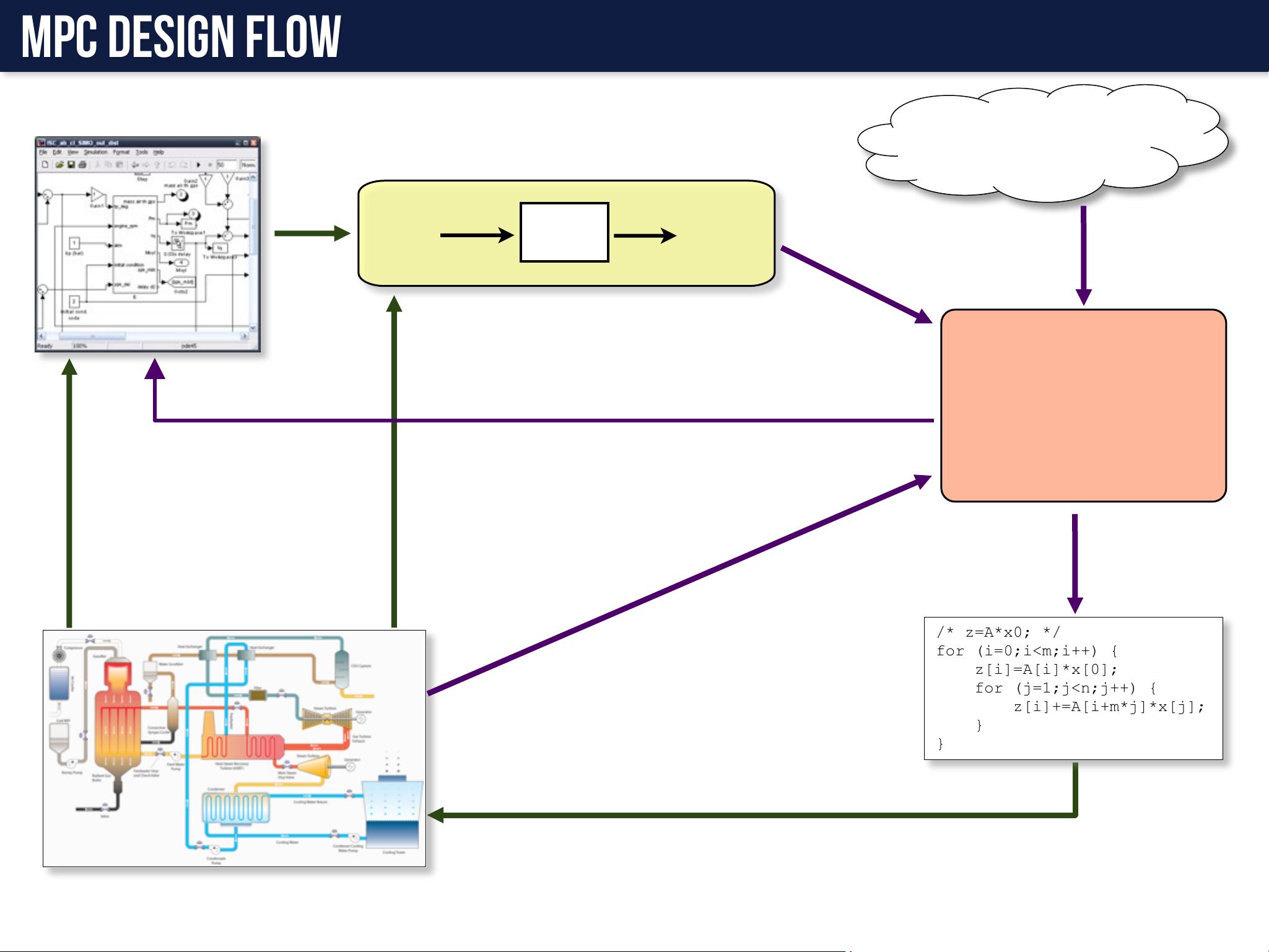
在工业自动化和过程控制领域,模型预测控制(Model Predictive Control,简称MPC)是一种先进的控制策略,其核心思想是基于系统动态模型进行未来状态的预测,并通过优化算法选取当前的最佳控制输入,以达到期望的控制性能。这份由Alberto Bemporad教授分享的课件详细介绍了MPC的相关知识,对于深入理解这一技术至关重要。
首先,课件中提到的"General concepts of model predictive control (MPC)"涵盖了MPC的基本原理,包括其与传统控制策略的区别,以及如何利用系统模型来预测系统未来的响应。MPC的关键在于它不仅考虑当前时刻的控制决策,还考虑到未来一段时间内的行为,这使得它能够处理约束条件并优化长期性能。
其次,"Linear MPC and extensions to time-varying and nonlinear MPC"部分,讲解了线性MPC的基础,它是MPC最常用的形式,适用于线性系统的控制。同时,课件还探讨了如何将MPC扩展到时间变易和非线性系统,这是MPC应用中的重要课题,因为许多实际系统往往是非线性和时变的。
接下来,"MPC computations: quadratic programming (QP), explicit MPC"阐述了MPC计算过程中的关键问题,即二次规划(Quadratic Programming, QP)和显式MPC。QP是求解MPC问题的一种常见优化方法,而显式MPC则允许预先计算控制序列,以减少在线计算负担。
此外,"Hybrid MPC"和"Stochastic MPC"是两个高级主题。混合MPC处理的是包含离散和连续状态的系统,如电气和机械系统的交互。而随机MPC则考虑了不确定性,如过程噪声和参数不确定性,以提高系统的鲁棒性。
课程中还提到了MATLAB工具箱,如MPCToolbox和Hybrid Toolbox,这些工具箱提供了实现和仿真MPC算法的框架,对于学习者来说是宝贵的实践资源。课程页面链接的提供使学习者可以获取更多相关资料和实践指导。
总结来说,这份课件是深入学习模型预测控制的宝贵资料,涵盖了从基础理论到高级应用的全面内容,适合对MPC感兴趣的学者和工程师参考学习。通过理解和掌握这些内容,可以提升对复杂系统控制设计的能力,从而在工业自动化、过程控制等领域实现更高效、更优化的控制策略。

Main$goals:
• Reduce$electricity$consumption$for$pumping
• Meet$demand$requirements
• Keep$storage$tanks$above$safety$limits
01-
(C)$2017$A.$Bemporad$-$“Model$Predictive$Control”$course
SMPC of drinking water networks
16
(Sampathirao,$Sopasakis,$Bemporad,$Patrinos,$2017)
Drinking water network
of Barcelona:
63 tanks
114 controlled flows
17 mixing nodes
FP7-ICT project “EFFINET - Efficient Integrated Real-time Monitoring and Control of Drinking Water
Networks” (2012-2015)
# scenarios
100 120 140 160 180 200 220 240 260 280 300
Runtime (s)
20
40
60
80
100
120
140
160
180
200
220
Gurobi
CUDA-APG (500 iter)
CUDA-APG (300 iter)
CPU$time$(s)
# scenarios
100 120 140 160 180 200 220 240 260 280 300
Runtime (s)
20
40
60
80
100
120
140
160
180
200
220
Gurobi
CUDA-APG (500 iter)
CUDA-APG (300 iter)
APG = Accelerated Proximal Gradient,
parallel implemented on NVIDIA Tesla
2075 CUDA platform

剩余118页未读,继续阅读
2020-06-11 上传
676 浏览量
805 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情









