模型预测控制MATLAB实现详解
"模型预测控制及其MATLAB实现"
模型预测控制(MPC,Model Predictive Control)是一种先进的控制策略,起源于20世纪80年代,主要用于应对非线性、不确定和时变的工业过程控制问题。MPC的核心特点是利用过程模型进行多步预测,通过滚动优化来决定当前的最佳控制输入,同时考虑系统的约束条件,以实现最优控制性能。这种算法的优越性在于它在设计时并不苛求精确的系统模型,而是通过反馈校正来补偿模型的不准确性。
动态矩阵控制(DMC)是MPC的一种具体实现,它依赖于对象的阶跃响应模型。DMC是一种增量控制算法,适用于稳定线性系统,即使系统存在纯滞后或非最小相位特性,也能有效处理。DMC的关键步骤包括预测模型、滚动优化和误差校正。预测模型是基于对象阶跃响应的离散系数构建,用于预测未来系统行为;滚动优化则是在预测基础上,通过最小化预估输出与设定值的偏差来确定最佳控制序列;最后,误差校正环节将实际误差纳入考虑,确保系统的闭环稳定性。
广义预测控制(GPC)则是MPC的另一种形式,它采用CARIMA(受控自回归积分滑动平均)模型,这允许在线估计参数,适应系统变化。GPC结合了预测控制和自适应控制的思想,可以处理非线性、时变的问题,且参数数目较少,提高了控制系统的鲁棒性和闭环稳定性。广义预测极点配置控制(GPP)进一步引入极点配置技术,优化系统的动态特性,增强系统的稳定性和控制性能。
MATLAB作为一种强大的数值计算和建模工具,广泛应用于MPC的实现和仿真。用户可以通过MATLAB的Simulink或者Control System Toolbox等工具箱来建立过程模型,设计预测控制器,并进行控制策略的验证和优化。MATLAB提供的这些功能使得工程师和研究人员能够方便地实现和测试MPC算法,进而应用于实际的工业控制问题中。
模型预测控制及其MATLAB实现是现代工业控制领域的重要研究方向,它提供了一种灵活且高效的控制方案,适用于处理复杂的控制任务。通过学习和掌握这一领域的知识,不仅可以提升控制系统的性能,还能应对各种不确定性因素带来的挑战。
2015/11/11
7
37
3) 闭环传递函数
由图7-2可求出GPC系统的闭环传递函数为
(7-33)
闭环系统的输出响应为
(7-34)
由以上可得如下结论
(1)GPC不是用控制器的极点去对消对象的零点,
因此不存在因对消不精确所带来的不稳定性问题,所
以GPC可用于非最小相位系统。
)()1()(
)(
1
1
QFBgzAHg
MBgz
ky
ky
TT
T
r
)(
)()1(
)1(
)(
)()1(
)(
1
1
1
k
QFBgzAHg
CHg
ky
QFBgzAHg
MBgz
ky
TT
T
r
TT
T
38
(2)闭环传递函数中不包括 ,只要 是稳定
的多项式,至于 的精度,它只影响跟踪性能而不
影响闭环稳定性和鲁棒性。
(3)当 时,,而 , 由式(7-
20)知 即 ,从而 代入式(7-34)可得
, 即系统在稳态时无差跟踪设定值,既使在
有阶跃扰动情况下也是无差跟踪,这里由CARIMA模
型内部积分作用所决定的。
(4)GPC系统闭环传递函数形式较为复杂(涉及到
向量F和H),不能明显看出GPC的设计参数对系统性能
的关系,不便进行系统分析,为此将GPC算法结构变
为内模结构形式,以便借助于内模原理研究系统的鲁
棒性、稳定性和其它特性。
)(
1
zC
)(
1
zC
)(
1
zC
)1(
zk
0
0)}({ kE
1
j
F
1F
QMF
r
yky )(
39
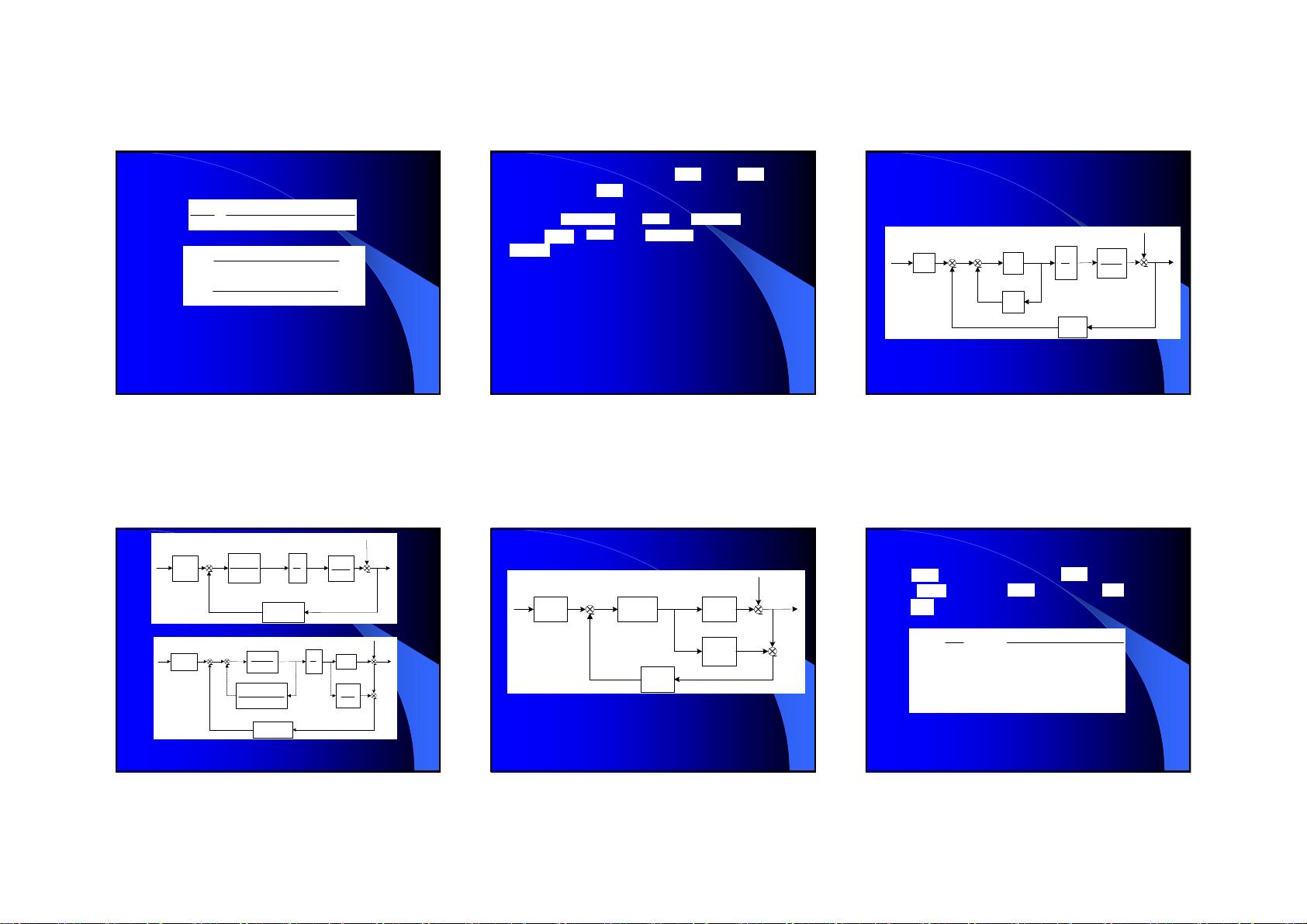
3. 广义预测控制的内模控制描述
1) GPC内模结构的推导过程
由图7-2变换依次可得图7-4(a)、(b)和(c)。
(a)
1
T
g
)(ku
)(ku
d
+
-
+
+
-
M
H
)(ky
r
y
+
QF
A
Bz
1
40
(c)
图7-4 GPC系统内模结构的推导过程
Mg
T
1
)(ku
+
-
)( QFg
T
r
y
Hg
T
1
1
A
Bz
1
+
d
+
)(ky
)(ku
Mg
T
Hg
T
1
1
1
)(zG
A
BZ
1
d
)(ku
)(ku
)(ky
-
--
r
y
)( QFg
T
A
BQFgz
T
)(
1
(b)
41
最后由图7-4(c)可得GPC的内模结构图为
图7-5 GPC系统内模结构图
)(sR
)(zG
)(zG
c
)(
~
zG
)(ku
)(kd
)(ky
)(
~
kd
-
-
r
y
)(zF
42
图中 被控过程的实际模型; 被控过程的预测
模型; 为控制器; 为滤波器; 总的扰动量;
为模型误差信号。
其中
(7-35)
)(
1
zG
)(
~
1
zG
)(
1
zG
c
)(
1
zF
)(kd
)(
~
kd
],,,[),1()(
)()()(
)()1(
)(,)(
~
21
1
1
1
1
1
1
1
1
n
T
n
j
j
j
T
n
j
j
jj
T
TT
c
dddgdMgzR
FdQFgzF
BQFgzAHg
A
zG
A
Bz
zG
剩余37页未读,继续阅读
2022-10-16 上传
2023-05-02 上传
2023-10-14 上传
2022-11-16 上传


weixin_42110321
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







