拓展服务机器人应用领域:ROS课程设计实践及技术探讨
 已收录资源合集
已收录资源合集
需积分: 0 190 浏览量
更新于2024-03-23
3
收藏 1.04MB PDF 举报
近年来,随着机器人领域的飞速发展,各种技术不断涌现,新发明和新成果表明机器人将为社会带来革命性变革。未来,机器人将成为人类工作的有效、准确和节省成本的助手。随着人工智能和云计算的发展,机器人成本不断降低,预示着即将到来的服务机器人时代。服务机器人将广泛应用于迎宾、餐厅点菜、养老服务、清洁和康复等领域,尤其在中国,服务机器人市场起步虽晚,但发展迅速、需求巨大,具有巨大的发展潜力和市场前景。服务机器人通常需要通过语音交互与人进行协作,并采用全局和局部路径规划来完成自主导航。本文围绕Bobac2服务机器人展开研究,包括地图建模与定位、语音控制、导航路径规划等实验。从服务机器人所需的基本功能入手,我们学习了经典算法原理,并进行了参数优化,为服务机器人的开发和应用奠定了基础。
本课程设计的目的是针对机器人操作系统技术进行深入研究和实验,通过对服务机器人Bobac2进行地图建模与定位、语音控制和导航路径规划等方面的试验,探索机器人操作系统技术在实际应用中的表现和优化空间。本报告将从摘要、目录、引言、技术背景、实验设计、实验结果、结论和参考文献等方面详细介绍ROS课程设计上机报告的相关内容和成果。
摘要部分介绍了近年来机器人领域的快速发展和潜在的市场前景,强调了服务机器人在未来的重要性和需求。同时概述了本课程设计的研究目标和研究方法,为后续内容的阐述做好铺垫。目录部分列出了全文内容的结构和组织,为读者提供了整体的框架和引导。
在技术背景部分,介绍了服务机器人所需的基本功能和技术要求,包括地图建模与定位、语音控制、导航路径规划等方面。针对Bobac2服务机器人的硬件和软件特点进行了介绍,并说明了本次实验的背景和意义。
实验设计部分详细描述了实验的目的、步骤和方法。地图建模与定位实验包括建图和定位两个子任务,通过SLAM算法生成地图并实现机器人定位;语音控制实验考察了机器人的语音交互功能;导航路径规划实验则测试了全局和局部路径规划的效果。每项实验都有详细的设计方案和实施步骤,确保实验的可靠性和有效性。
实验结果部分展示了实验数据和实验结果,包括地图建模与定位的效果、语音控制的准确率以及导航路径规划的路径优化情况。通过对比实验前后的数据和图表,分析实验结果的有效性和改进空间,为后续的优化提供依据。
结论部分对本次实验进行总结和评价,强调了实验的意义和成果,指出了存在的问题和改进的方向。同时展望了未来机器人操作系统技术的发展前景和应用前景,为相关研究和实践提供借鉴和参考。
最后,参考文献部分列出了本报告所引用的文献和资料,方便读者查证和深入了解研究领域的相关内容。整体而言,本报告全面系统地介绍了ROS课程设计上机报告的实验内容和成果,为相关研究和实践提供了重要参考和启示。
9
图 2 静态地图
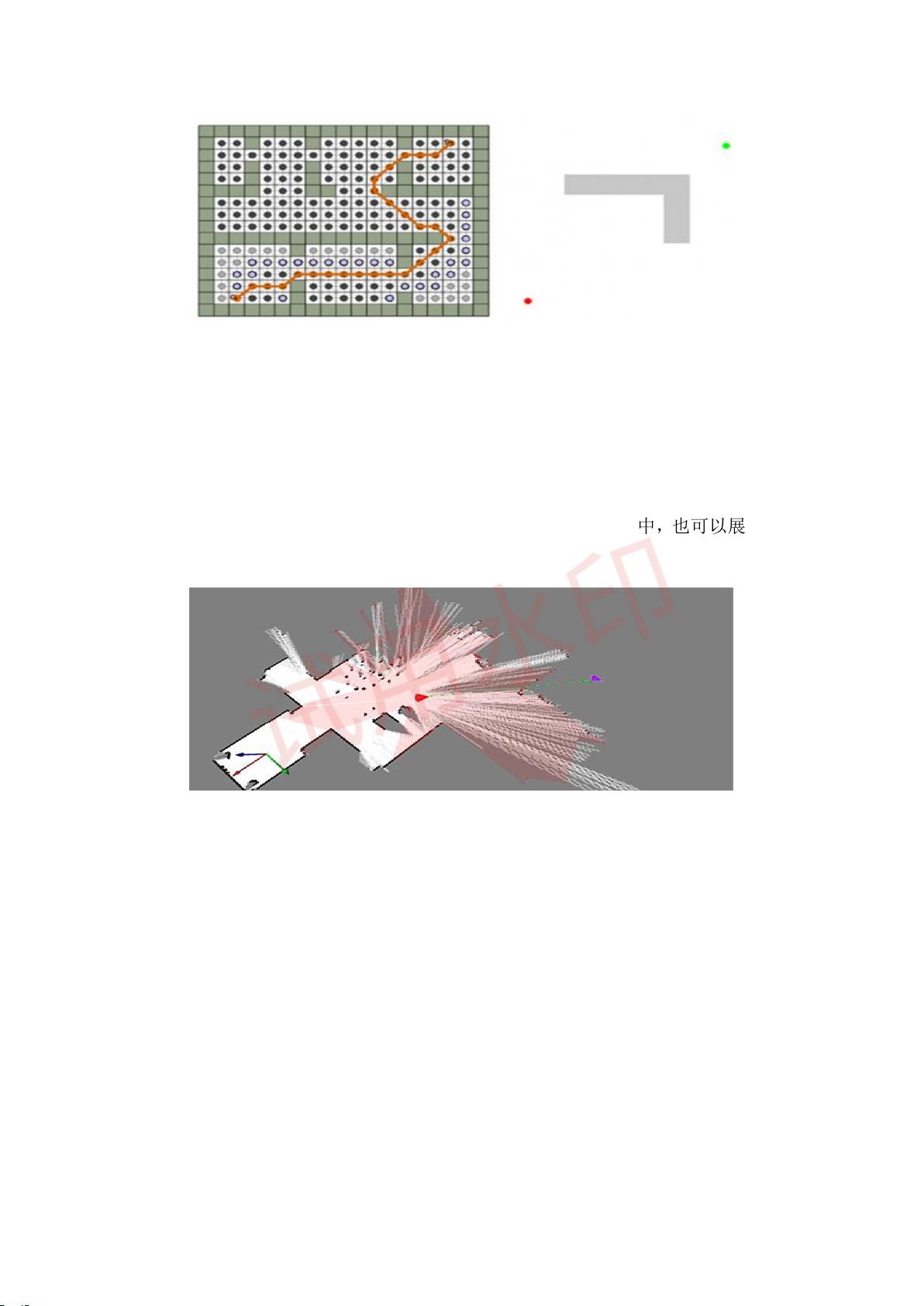
(2)D* 算法
D*算法则是一种动态启发式路径搜索算法,它事先对环境位置,让机器人
在陌生环境中行动自如,在瞬息万变的环境中游刃有余。D*算法的最大优点是
不需要预先探明地图,机器人可以和人一样,即使在未知环境中,也可以展开行
动,随着机器人不断探索,路径也会时刻调整。
图 3 动态地图
上述的几种算法都是目前绝大部分机器人所需要的路径规划算法,能够
让机器人跟人一样智能,快速规划 A 到 B 点的最短路径,并在遇到障碍物的时
候知道
如何处理。
局部 SLAM 是通过每一帧激光与当前子图进行扫描匹配进行构建的,而在
匹配前,通过位姿推断器来给予每一帧激光匹配的初始位姿,而位姿推断器除了
使用激光数据,也可以使用其他数据,如 imu、odom 等,位姿推断器实现了融
合多数据的位姿更新。全局 SLAM 负责通过优化的方式在后台来重新调整各个
子图的位姿使得形成一个完整连贯的全局地图。此优化负责更改当前构建的轨迹,
以根据闭环检测来正确地对齐子图。
剩余56页未读,继续阅读
2021-10-08 上传
107 浏览量
2023-09-21 上传
2023-10-03 上传
2023-12-27 上传
2023-04-01 上传
2023-04-01 上传
2023-02-16 上传
2023-02-16 上传

掩于岁月ο
- 粉丝: 1
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 天池大数据比赛:伪造人脸图像检测技术
- ADS1118数据手册中英文版合集
- Laravel 4/5包增强Eloquent模型本地化功能
- UCOSII 2.91版成功移植至STM8L平台
- 蓝色细线风格的PPT鱼骨图设计
- 基于Python的抖音舆情数据可视化分析系统
- C语言双人版游戏设计:别踩白块儿
- 创新色彩搭配的PPT鱼骨图设计展示
- SPICE公共代码库:综合资源管理
- 大气蓝灰配色PPT鱼骨图设计技巧
- 绿色风格四原因分析PPT鱼骨图设计
- 恺撒密码:古老而经典的替换加密技术解析
- C语言超市管理系统课程设计详细解析
- 深入分析:黑色因素的PPT鱼骨图应用
- 创新彩色圆点PPT鱼骨图制作与分析
- C语言课程设计:吃逗游戏源码分享
