单目双目相机标定详解:畸变校正与三维重建
需积分: 50 163 浏览量
更新于2024-07-01
11
收藏 15.61MB PPTX 举报
在计算机视觉领域,单目和双目相机的标定是至关重要的技术,它们主要用于矫正图像畸变、实现三维重建和精确测距。标定的目的是建立物体在三维世界与二维图像间的准确对应关系,以便在实际应用中获取更精确的信息。
首先,相机标定的目的是矫正镜头畸变,确保从现实世界拍摄的直线在图像中保持直线形状。通过标定,我们可以计算出镜头的内参数,包括焦距和畸变系数,这些参数用于调整图像以消除变形。
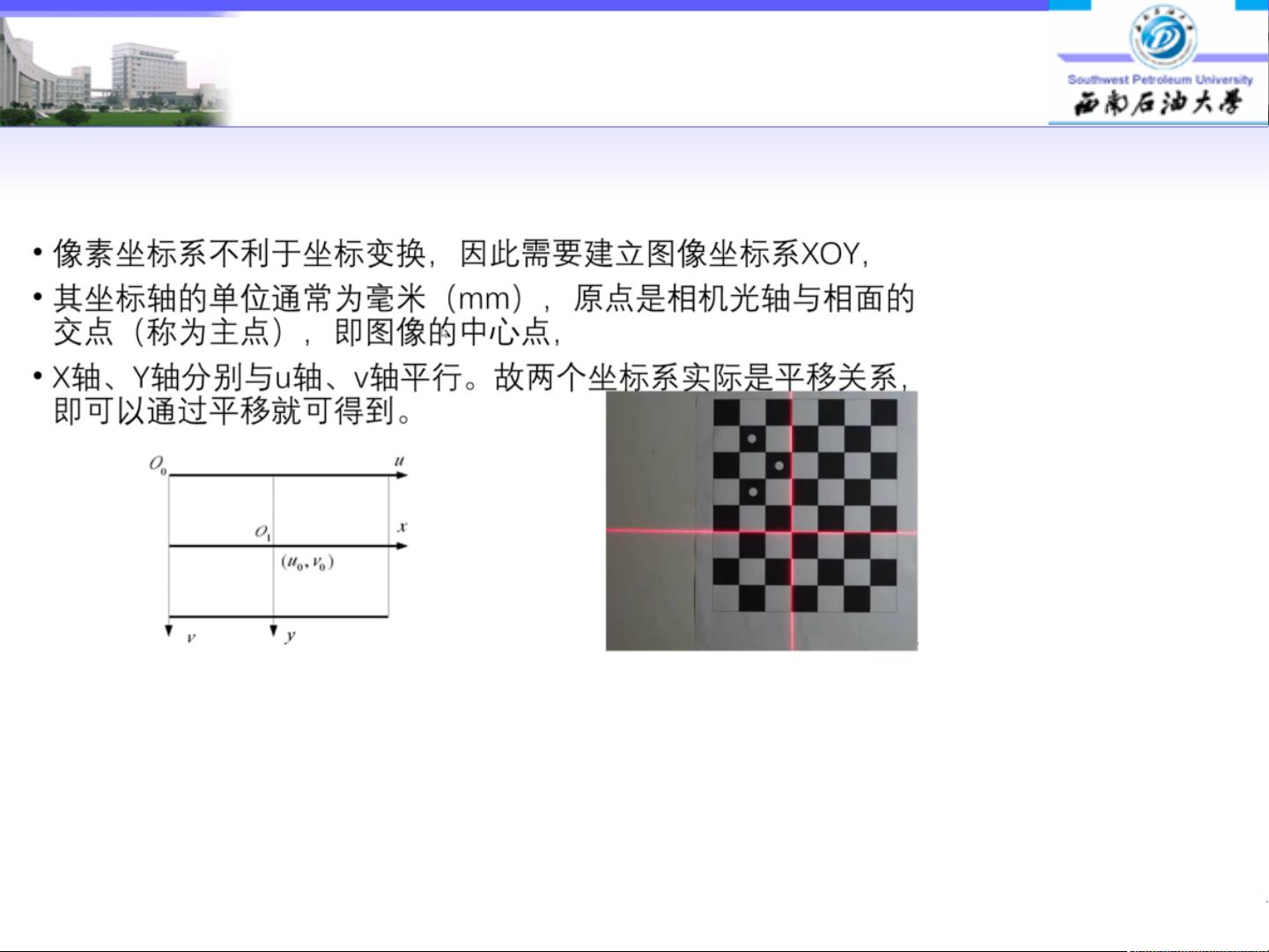
其次,标定涉及到多个坐标系的转换。世界坐标系(Xw、Yw、Zw)是现实世界的基础,相机坐标系(Xc、Yc、Zc)则依据相机的物理结构定义,其中Zc轴与光轴重合。图像坐标系(x、y)表示物体在相机视场内的位置,而像素坐标系(u、v)则是数字化图像上的实际像素位置。标定过程涉及从相机坐标系到图像坐标系的旋转(如针孔成像原理),再到像素坐标系的转换,其中包括了固有参数(dx, dy)和图像中心偏移(u0, v0)。
在单应性(Homography)变换中,单应性矩阵描述了物体在世界坐标系和像素坐标系之间的位置关系,这对于实现立体视觉中的匹配和立体重建至关重要。通过一系列的测量数据和数学模型,我们可以从标定图中推导出单应性矩阵,这个矩阵在双目立体视觉中尤为重要,因为它允许我们计算视差,即两个相机观察同一物体时的像素差异,从而实现深度感知和三维重建。
双目测距是利用两台相机的视差信息,通过三角测量方法来估计物体与相机的距离。双目相机的联合标定通常包含同步曝光、时间延迟、相对姿态(外参)的确定,以及基于深度图的三维点云构建。立体校正则进一步优化了图像对齐,减少视差模糊和不一致,使得立体匹配更加精准。
三维重建则是标定结果的实际应用,它基于单目和双目的深度信息,通过融合多视角图像,恢复出真实世界中物体的3D模型。这个过程通常包括匹配、跟踪、立体匹配算法,以及后处理步骤如多视图几何和优化算法。
总结来说,单目和双目相机的标定是一个复杂的数学和图像处理过程,涵盖了内参与外参的估计、坐标系转换、单应性矩阵的求解、立体匹配和三维重建等多个关键技术环节,对于实现高效、精确的计算机视觉应用具有基础性作用。
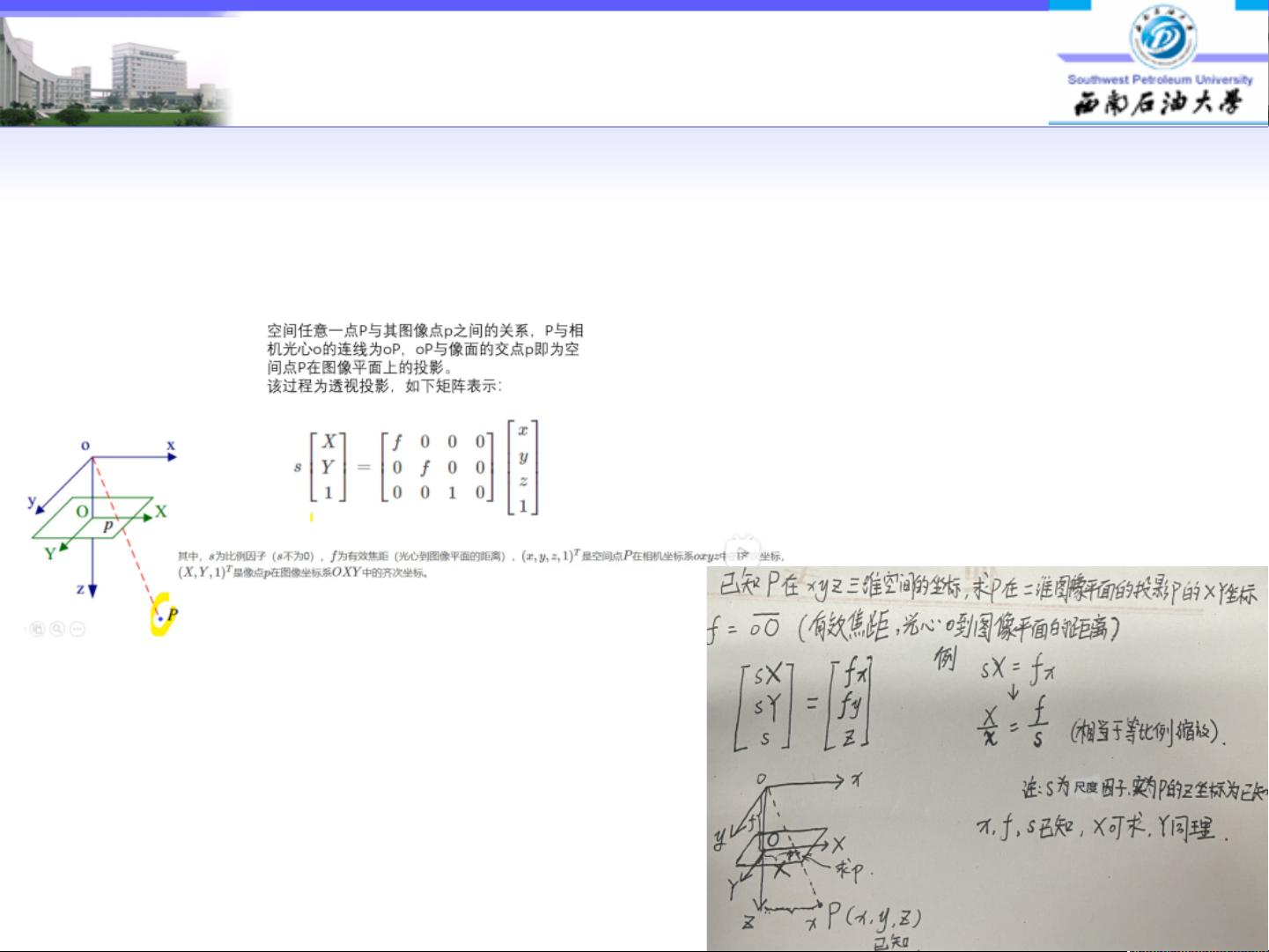
相机坐标系转图像坐标系(针孔成像原理)
相机标定
剩余31页未读,继续阅读
2020-05-29 上传
2023-04-28 上传
2023-11-01 上传
2023-04-01 上传
2023-05-26 上传
2023-10-15 上传
2023-02-17 上传

没李不邢
- 粉丝: 73
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 火炬连体网络在MNIST的2D嵌入实现示例
- Angular插件增强Application Insights JavaScript SDK功能
- 实时三维重建:InfiniTAM的ros驱动应用
- Spring与Mybatis整合的配置与实践
- Vozy前端技术测试深入体验与模板参考
- React应用实现语音转文字功能介绍
- PHPMailer-6.6.4: PHP邮件收发类库的详细介绍
- Felineboard:为猫主人设计的交互式仪表板
- PGRFileManager:功能强大的开源Ajax文件管理器
- Pytest-Html定制测试报告与源代码封装教程
- Angular开发与部署指南:从创建到测试
- BASIC-BINARY-IPC系统:进程间通信的非阻塞接口
- LTK3D: Common Lisp中的基础3D图形实现
- Timer-Counter-Lister:官方源代码及更新发布
- Galaxia REST API:面向地球问题的解决方案
- Node.js模块:随机动物实例教程与源码解析
