

2.5 Bounded-Hop Techniques
The idea behind bounded-hop techniques is to precompute distances between pairs of
vertices, implicitly adding “virtual shortcuts” to the graph. Queries can then return the
length of a virtual path with very few hops. Furthermore, they use only the precomputed
distances between pairs of vertices, and not the input graph. A naïve approach is to use
single-hop paths, i. e., precompute the distances among all pairs of vertices
u, v ∈ V
. A
single table lookup then suffices to retrieve the shortest distance. While the recent PHAST
algorithm [75] has made precomputing all-pairs shortest paths feasible, storing all Θ(
|V |
2
)
distances is prohibitive already for medium-sized road networks. As we will see in this
section, considering paths with slightly more hops (two or three) leads to algorithms with
much more reasonable trade-offs.
s
t
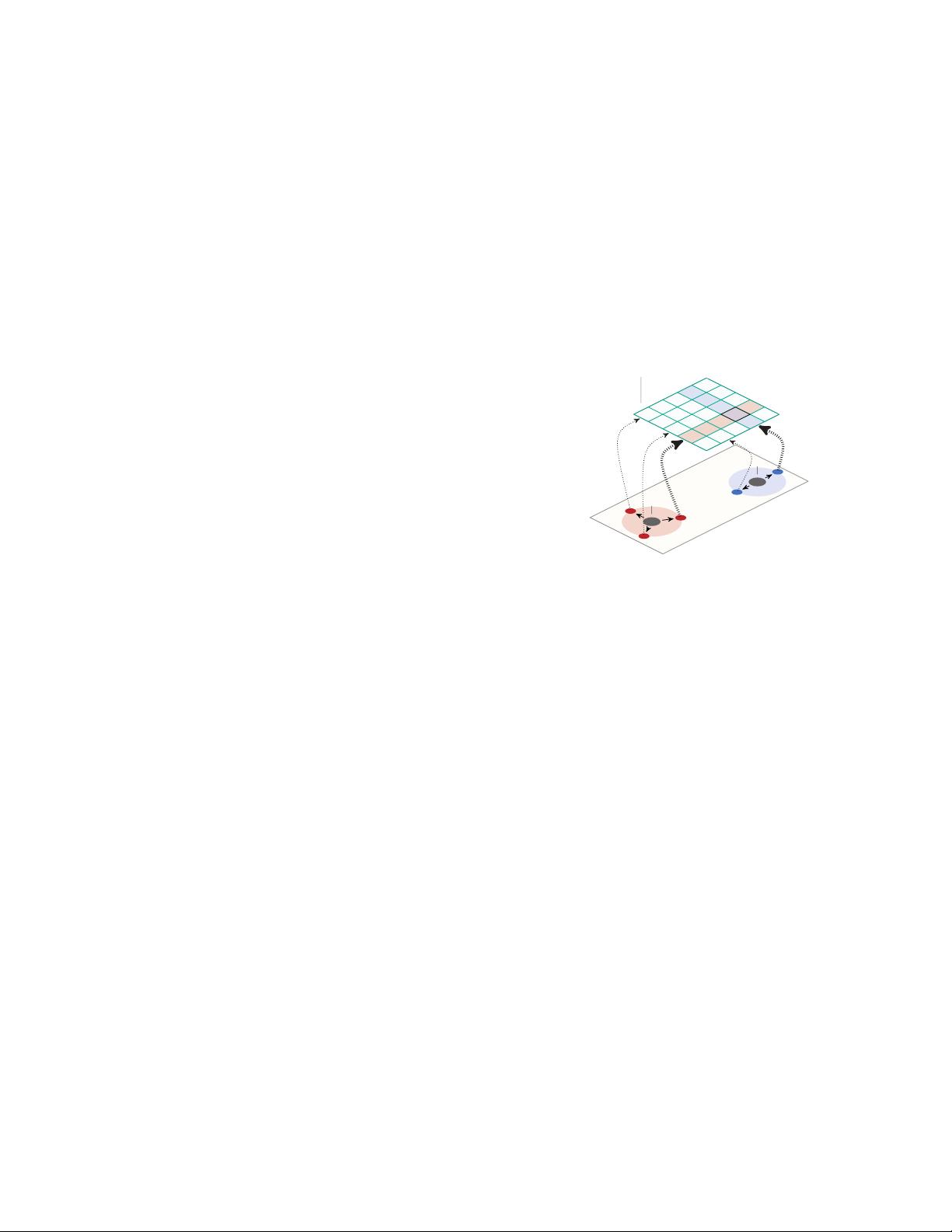
Figure 5.
Illus-
trating hub labels of
vertices
s
(diamonds)
and t (squares).
Labeling Algorithms.
We first consider labeling algorithms [215].
During preprocessing, a label
L
(
u
) is computed for each vertex
u
of the graph, such that, for any pair
u, v
of vertices, the dis-
tance
dist
(
u, v
) can be determined by only looking at the labels
L
(
u
)
and
L
(
v
). A natural special case of this approach is Hub Label-
ing (HL) [64, 135], in which the label
L
(
u
) associated with vertex
u
consists of a set of vertices (the hubs of
u
), together with their dis-
tances from
u
. These labels are chosen such that they obey the cover
property: for any pair (
s, t
) of vertices,
L
(
s
)
∩ L
(
t
) must contain at
least one vertex on the shortest
s
–
t
path. Then, the distance
dist
(
s, t
)
can be determined in linear (in the label size) time by evaluat-
ing
dist
(
s, t
) =
min{dist
(
s, u
) +
dist
(
u, t
)
| u ∈ L
(
s
)
and u ∈ L
(
t
)
}
.
See Figure 5 for an illustration. For directed graphs, the label
associated with
u
is actually split in two: the forward label
L
f
(
u
)
has distances from
u
to the hubs, while the backward label
L
b
(
u
)
has distances from the hubs to u; the shortest s–t path has a hub in L
f
(s) ∩ L
b
(t).
Although the required average label size can be Θ(
|V |
) in general [135], it can be
significantly smaller for some graph classes. For road networks, Abraham et al. [4] have
shown that one can obtain good results by defining the label of vertex
u
as the (upward)
search space of a CH query from
u
(with suboptimal entries removed). In general, any vertex
ordering fully defines a labeling [5], and an ordering can be converted into the corresponding
labeling efficiently [5, 12]. The CH-induced order works well for road networks. For even
smaller labels, one can pick the most important vertices greedily, based on how many
shortest paths they hit [5]. A sampling version of this greedy approach works efficiently for
a wide range of graph classes [78].
Note that, if labels are sorted by hub ID, a query consists of a linear sweep over two
arrays, as in mergesort. Not only is this approach very simple, but it also has an almost
perfect locality of access. With careful engineering, one does not even have to look at all the
hubs in a label [4]. As a result, HL has the fastest known queries for road networks, taking
11

剩余64页未读,继续阅读

杏花朵朵
- 粉丝: 19
- 资源: 332
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- 京瓷TASKalfa系列维修手册:安全与操作指南
- 小波变换在视频压缩中的应用
- Microsoft OfficeXP详解:WordXP、ExcelXP和PowerPointXP
- 雀巢在线媒介投放策划:门户网站与广告效果分析
- 用友NC-V56供应链功能升级详解(84页)
- 计算机病毒与防御策略探索
- 企业网NAT技术实践:2022年部署互联网出口策略
- 软件测试面试必备:概念、原则与常见问题解析
- 2022年Windows IIS服务器内外网配置详解与Serv-U FTP服务器安装
- 中国联通:企业级ICT转型与创新实践
- C#图形图像编程深入解析:GDI+与多媒体应用
- Xilinx AXI Interconnect v2.1用户指南
- DIY编程电缆全攻略:接口类型与自制指南
- 电脑维护与硬盘数据恢复指南
- 计算机网络技术专业剖析:人才培养与改革
- 量化多因子指数增强策略:微观视角的实证分析
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


