那智OTC机器人CC-Link通讯指南
需积分: 45 85 浏览量
更新于2024-07-14
1
收藏 1.09MB PDF 举报
"NACHI那智OTC的OTC_CClink.pdf文件主要介绍了如何使用那智OTC机器人与CC-LINK通讯系统进行集成操作。这份手册涵盖了从基本概念到实际应用的所有关键步骤,旨在帮助操作人员理解和配置机器人与CC-LINK网络的连接。"
CC-LINK是一种控制与通信链接系统,设计用于工业自动化领域,它提供了高速同步控制和大量信息数据处理的能力。此网络系统允许将各种设备,如限位开关、光电传感器、操作面板和机器人,连接在一起,简化了传统硬件配线并增强了设备间的通信能力。通过网络I/O逻辑访问,可以进行设备级别的诊断和控制,支持最多64个节点,提高了系统的可扩展性和灵活性。
在那智OTC的机器人系统中,CC-LINK功能是集成的重要部分。手册的第1章介绍了CC-Link的基本概念和与OTC机器人控制装置的连接方式。1.2节详细讨论了控制装置的CC-Link功能,包括输入输出信号的配置、性能参数、安装位置、硬件配置和电缆连接指南。
第2章列举了实现CC-Link通讯所需的全部组件,这可能包括CC-Link接口卡、连接电缆和其他必要的硬件设备。
第3章详细阐述了信号分配的规则,分为软件PLC有效和无效时的情况,以及跨通路分配。此外,还具体解释了当机器人作为CC-Link网络中的从动节点或主节点时的信号分配。
第4章则专注于CC-Link的使用方法,包括设定步骤、具体的CC-Link设置(主节点和从动节点的设置)以及动作确认过程,确保正确无误的通讯连接。
最后,第5章提到了错误检测,包括CC-Link基板和控制装置上可能出现的错误,以及现场总线(Fieldbus)错误的详细信息,这些内容对于故障排查和系统维护至关重要。
总体来说,这份手册为那智OTC机器人的用户提供了全面的指导,使其能够充分利用CC-LINK通信技术,实现高效、可靠的自动化生产环境。
1.1 什么是 CC-Link
1-1
第1章 概要和连接
1.1 什么是 CC-Link
CC-Link(Control & Communication Link)是为了满足 FA 系统用户的各种需求,实现高速同步控制和信息数
据处理的网络系统。该系统不仅实现了限位开关、光电传感器、操作面板、机器人等工业设备的网络连接,还可以
对各设备的输入输出(网络 I/O)进行逻辑访问,由此原本难以进行硬件配线的装置间不仅通信得到了改善,还可
以进行装置等级的诊断。最大 64 节点的网络节点数,通信速度可以从 156Kbps~10Mbps 中选择,以适应网络的规
模。
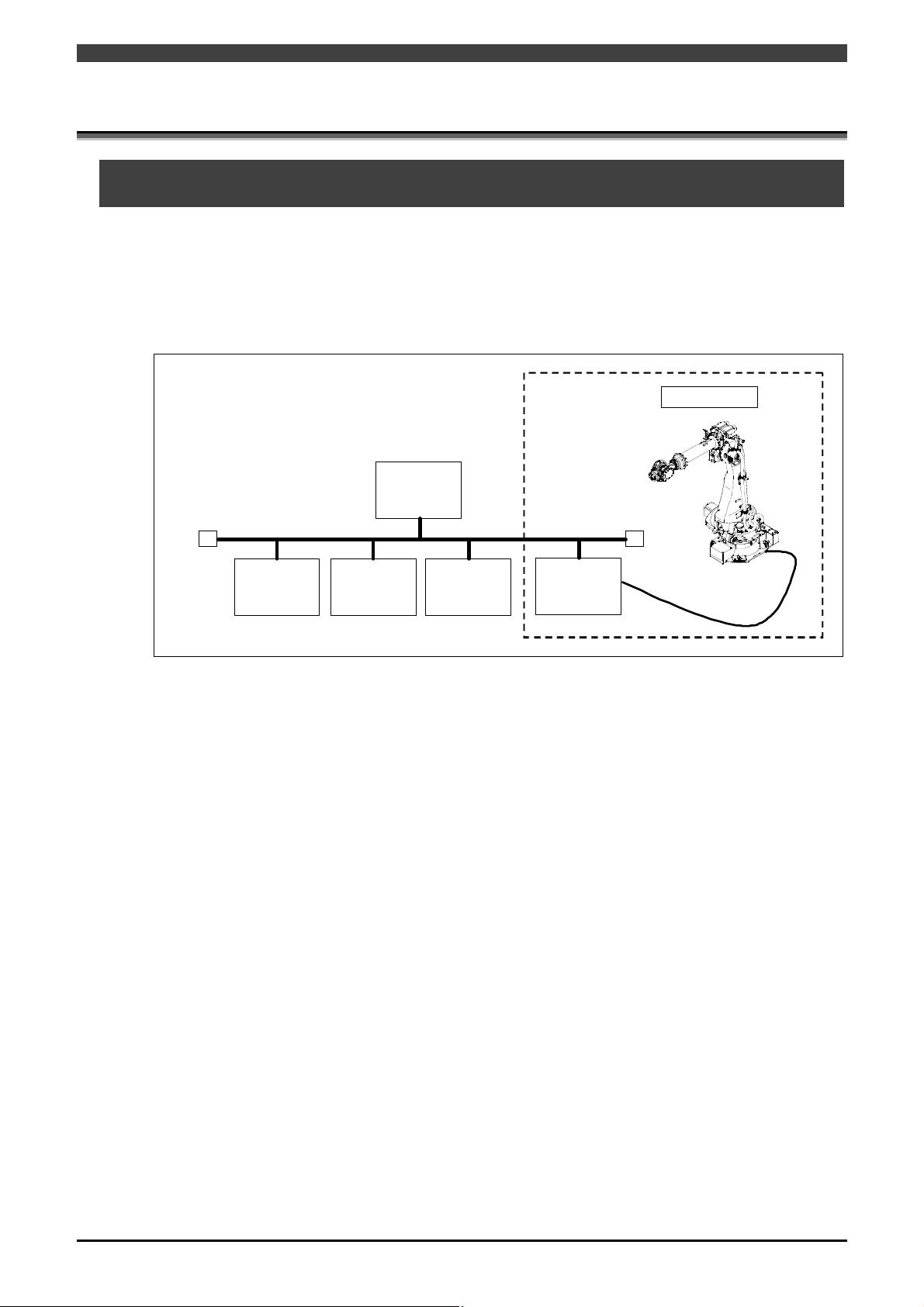
下图表示本控制装置作为从动节点连接到 CC-Link 时的图例。
终端电阻 终端电阻
各种
顺序发生器
各种
传感器
各种
I/O 装置
机器人
控制装置
个人计算机
(主节点)
机器人主体
CC-Link 连接图
CC-Link 功能如上图所示,可以连接到 CC-Link。通过本功能,本控制装置可以在 CC-Link 上作为主节点或从
动节点(或同时兼用)运行,并可以跨网络操作 I 信号等通用输入输出信号。
CC-Link 是 CC-Link 协会的注册商标。
剩余25页未读,继续阅读
385 浏览量
449 浏览量
668 浏览量
385 浏览量
449 浏览量
202 浏览量
893 浏览量
2019-06-22 上传

艺多压身
- 粉丝: 2
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 家庭主页源码 V1.0
- efeito视差
- delphi开发,源码过磅系统。
- 一组文件类型图标 .svg .png素材下载
- 执行winutils报错解决.rar
- coor,c语言字符串比较函数源码,c语言
- 电子商务全栈:使用Java,Spring,Hibernate和BackboneJS和MarionetteJS创建的电子商务项目
- 易语言多次寻找文本
- MOVIDRIVE说明.rar
- GolangGuide:总结了golang常见的面试题,总结了一些资料提供查看
- faaversion4
- hao123万年历源码 v2015
- codersign.github.io
- unlocker-3.0.3.rar
- 基于HTML实现的渐变大气交互式响应式设计html5(含HTML源代码+使用说明).zip
- gretty7-plugin-0.0.6.zip
