不确定环境下车辆路径规划方法综述
需积分: 10 180 浏览量
更新于2024-07-18
收藏 34.92MB PDF 举报
"path planning for vehicles operating in uncertain 2D environments"
在复杂的二维不确定环境中,对车辆进行路径规划是一项关键任务,涉及到多个领域的技术融合。这篇文献综述由Viacheslav Pshikhopov等人撰写,并有多位来自Southern Federal University的研究者贡献,探讨了多种用于解决这一问题的方法。
首先,模糊逻辑被引入来处理不确定性。在充满未知因素的环境中,模糊逻辑能够通过处理不精确和模糊的信息,帮助车辆动态调整其路径规划策略。它利用模糊推理系统来模拟人类决策过程,从而适应环境变化。
其次,图形分析搜索技术在路径规划中扮演重要角色。这些方法通常基于图论,将环境建模为一个网络,节点代表位置,边表示连接这些位置的可能性。通过寻找最短或最优路径,车辆可以在不确定性中找到安全、高效的行驶路线。
神经网络和类神经结构也是研究的重点。这些模型可以学习和模仿复杂的行为,通过训练数据适应环境变化。例如,它们可以预测障碍物的动态行为,从而提前规划规避策略。
遗传搜索程序是另一种被采用的技术,它们模仿生物进化过程来优化路径。通过迭代过程,这些算法能逐步改进解决方案,寻找适应环境的最优路径。这种方法的优势在于其全局搜索能力,能够在大量可能的路径中找到最佳解。
此外,不稳定运动模式也被考虑在内。在某些情况下,车辆可能需要快速响应环境变化,执行如急转弯或突然加速等动作。通过理解这些不稳定模式,路径规划算法可以更有效地处理紧急情况。
文献中还提到了RoboCV Ltd.的贡献,这可能意味着实际的机器人视觉系统也在路径规划中发挥了作用,帮助车辆感知和理解环境,进一步提高规划的准确性。
这篇综述涵盖了从理论到实践的多种路径规划方法,旨在为在不确定环境下运行的车辆提供可靠、灵活的导航策略。这些技术的结合使用,能够帮助车辆在实时性、安全性以及效率之间找到平衡,适应不断变化的二维环境。
Eqs. (1.2)e(1.5) present the robot’s model assuming that there is no wheel
slip and the motion surface is ideally flat.
1.2.3 Description of Vehicle Functioning Test Scenes
In this monograph, the following assumptions are made for the test scenes:
l
test scene is a flat surface;
l
there is no wheel slip;
l
there are obstacles on the surface that can be pointed or have a complicated
form. Complicated obstacles are the arrays of pointed obstacles; and
l
the moment whe n the functioning starts, the vehicle has no information
about the obstacles location.
In a general case the vehicle’s functioning scene can include stationary and
mobile obstacles. In all motion planning research work in this book, the obsta-
cles are assumed to be quasi-stationary.
Complicated scenes are considered in this book. The term “complicated
scene” means that it can include complicated obstacle-objects that are greater
than vehicle’s size and have a specific form. In the test scenes, the complicated
obstacles are described by uneven and generally non-convex contours consist-
ing of unity-size points that can form line segments.
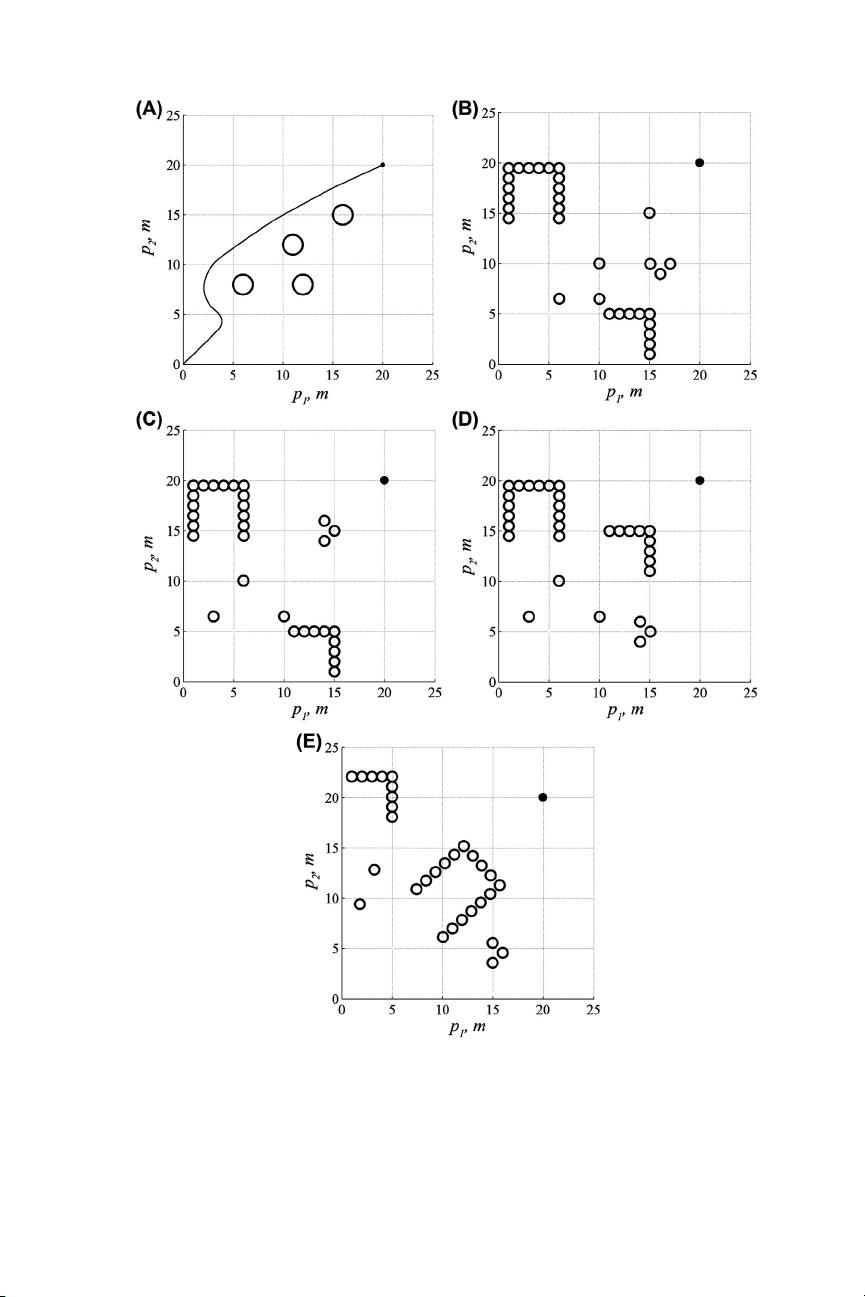
In model experiments, we used a flat-structured environment 25 25 m in
size with several types of obstacles presented in Fig. 1.3 (convex, closely
located, L-shaped, and U-shaped). The vehicle moves from initial point
A
0
(p
10
, p
20
) to the final one A
f
( p
1f
, p
2f
).
1.3 MOTION PATH PLANNING
In autonomous vehicles control one of the critical tasks is planning the motion
path. It is necessary to describe the generated paths by a limited amount of in-
formation [41]. In control systems with an operator in control cont our (pilot,
driver), there is no such problem. Operator generates the path and performs
monitoring of the path-following process. However, if the planning and path -
following functions are structurally separated, the path description should be
cohered with the lower controller level.
Usage of large arrays approximating the path with points is a possible solu-
tion for automatic description of the generated path. However, this approach is
redundant. In work [42], it is proposed to plan paths in the form of connected
straight lines which essentially lowers the class of planned paths and, therefore,
vehicle’s functional capabilities. In works [43,39] the paths are represented by a
sequence of straight lines and arcs of a circle. However, the path’s flexion is not
continuous and hence, strictly speaking, the vehicle can’t move evenly along it.
The authors of the works Refs. [39,44e46] proposed control systems
assuming paths planning in the internal coordinates space. Since the transfer
procedure from external to internal coordinate’s space is hardly formalizable,
there will be difficulties in implementation of the desired paths in case of
complicated kinematic schemes. The mentioned methods can be used in anal-
ysis of the vehicle’s motion for the set control actions.
1.3 Motion Path Planning 9


剩余302页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2020-02-26 上传
2024-01-17 上传
2022-08-04 上传
2018-06-14 上传
2016-11-14 上传
2022-08-04 上传

暮里残阳
- 粉丝: 19
- 资源: 8
 我的内容管理
展开
我的内容管理
展开







最新资源
- MyEclipse6 JavaEEDev_PDF
- oracle的入门心得
- WebService传递POJO和对象数组的例子
- 租用游艇问题 长江游艇俱乐部在长江上设置了n 个游艇出租站1,2,…,n。游客可在这些游艇出租站租用游艇,并在下游的任何一个游艇出租站归还游艇。游艇出租站i 到游艇出租站j 之间的租金为r(i,j),1≤i<j≤n。试设计一个算法,计算出从游艇出租站1 到游艇出租站n 所需的最少租金。
- 示波器基础知识,学习
- c c++算法大全(数据结构)
- Mac os的快捷键
- 最优装载 有一批集装箱要装上一艘载重量为c的轮船。其中集装箱i的重量为Wi。最优装载问题要求确定在装载体积不受限制的情况下,将尽可能多的集装箱装上轮船。
- SIP呼叫流程典型流程图解及其详细解释
- Verilog HDL 入门教程
- EXT 中文手册.pdf
- CMMI软件-必备测试
- ASP转html静态页面后点击计数解决方法和用户登录状态的解决方法
- 模式识别的研究进展分析
- 几种嵌入式文件系统的对比
- eclipse中文教程
