ORB-SLAM2源码深度解析:数据结构与关键变量
需积分: 0 94 浏览量
更新于2024-06-30
收藏 802KB PDF 举报
ORB-SLAM2是一种先进的视觉SLAM(同时定位和映射)算法,它结合了特征匹配、稠密地图构建以及回环检测技术,以实现在未知环境中进行精确的机器人导航。本篇文章由信息科学与工程学院人工智能与机器人研究所的吴博@泡泡机器人撰写,详细解析了ORB-SLAM2的源码结构和关键变量命名规则。
首先,我们关注变量命名规则,这是理解和阅读代码的关键。文章指出,作者遵循一定的命名习惯:
- "p" 表示指针数据类型,用于引用或指向内存中的数据。
- "n" 代表整型(int)数据,通常用于计数或者数值存储。
- "b" 是布尔类型(bool),用于表示真假状态。
- "s" 表示集合类型(set),用于存储一组不重复的数据。
- "v" 指向向量(vector),用于动态数组,常用于有序序列的存储。
- "l" 代表列表类型(list),与vector类似,但允许元素插入和删除更为灵活。
- "m" 作为类成员变量,通常用于表示对象内部的状态或属性。
接下来,系统入口部分展示了ORB-SLAM2如何处理输入图像。它支持单目、双目和RGB-D三种传感器类型的数据获取。对于单目,有一个未初始化和已初始化两种情况的Frame构造函数,其中mpIniORBextractor提取的特征点更多,可能是为了提高初始阶段的匹配精度。双目和RGB-D数据则直接创建Frame对象,包含了灰度图像、深度图像以及ORB特征提取器。
核心的Tracking线程负责实时的SLAM过程。初始化步骤包括双目初始化(Stereoinitilization),这个过程可能涉及到特征匹配的预处理工作。在跟踪阶段,每个关键帧(KeyFrame)都会被添加到地图(mpMap)中,并与数据库(mpKeyFrameDB)进行比较,以检查是否存在回环。用户还可以通过设置mbOnlyTracking为false,使系统能够在定位和建图之间切换。
在system.cc的代码中,第37行调用了tracking.cc中的函数,具体参数2000和2000*2可能与关键帧的特征点数量相关,该数值是从外部配置文件(如Examples/Monocular/KITTI00-02.yaml)中读取的。
本文详细介绍了ORB-SLAM2源码的核心部分,包括变量命名规范和关键模块的功能,如图像抓取、特征提取、跟踪和回环检测。这对于理解并修改或扩展此SLAM系统具有重要的参考价值。
7
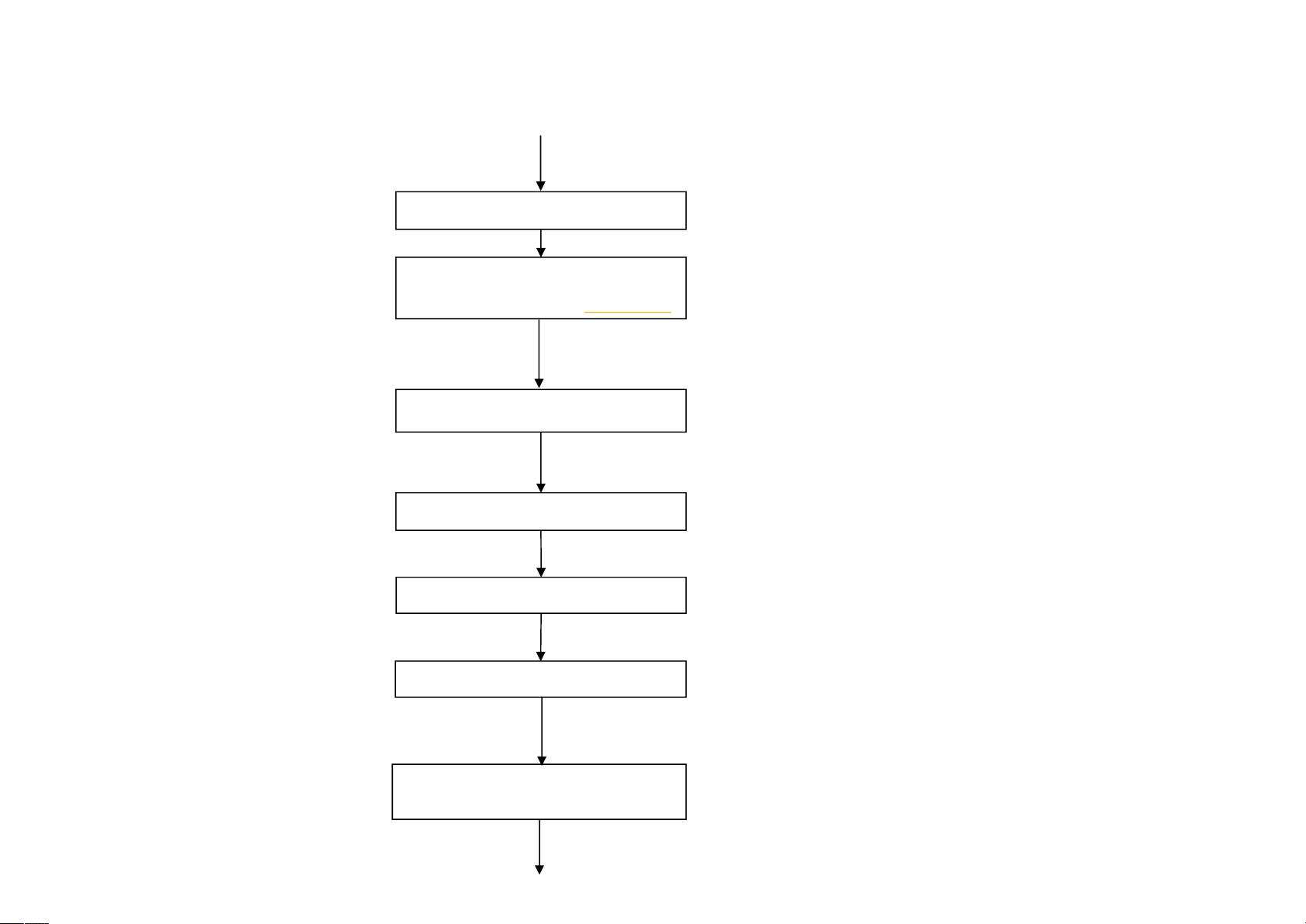
LocalClosing线程(Sim3计算):
SearchByBow
mpCurrentKF
处构造Sim3求解器,对匹配
成功的关键帧进行Sim3求解
for(pKF,mvpEnoughConsistentCandidates)
vvpMapPointMatches
SearchBySim3得到更多匹配
Scm -->(R,t,s)
mpCurrentKF,pKF
vpMapPointMatches
OptimizeSim3
(mpCurrentKF,pKF)
Scm -->gscm
vpMapPointMatches
将MatchedKF共视帧取出
vpMapPointMatches -->mvpCurrentMatchedPoints
pKF -->MatchedKF
将MatchedKF共视帧取出
(包括MatchedKF)
vpLoopConnectedKFs
SearchByProjection得到更
多匹配点
mpCurrentKF
mvpLoopMapPoints
gscm -->mg2oscw -->mscw
mvpCurrentMatchedPoints
7
下载后可阅读完整内容,剩余33页未读,立即下载
167 浏览量
1567 浏览量
358 浏览量
829 浏览量
1221 浏览量
649 浏览量
1304 浏览量
167 浏览量
358 浏览量

練心
- 粉丝: 27
 我的内容管理
展开
我的内容管理
展开







最新资源
- 1981-1999年全球海洋温度数据集分析
- qiita_add_lgtm-crx插件:简化Qiita文章审阅流程
- Java CMS系统jeecms-2012版本深度解析
- 深度解析Android Spinner自定义下拉框的实现方法
- 计算机硬件基础课程讲解第一章
- Linux下基于Qt和MySQL的智能报警系统
- 易语言开发的QQ自动申请器源码解析
- PowerDesigner12.5汉化文件发布,提供pdshell12下载
- Toto-crx插件:提升英语学习体验
- Java实现txt文件加密与解密成exe软件
- 深入解析fckEditor编辑器源码及其应用示例
- CrossText-crx插件:增强文本交互体验
- 易语言实现QQ申请数据源码分析与操作
- 快速部署的海盗王SF空白数据库解决方案
- Shell脚本自动化安装最新版FFmpeg源码教程
- 33种CSS导航样式免费下载资源整理











