RTT_emWin移植与触摸屏校准实践
需积分: 0 64 浏览量
更新于2024-06-30
收藏 8.44MB DOCX 举报
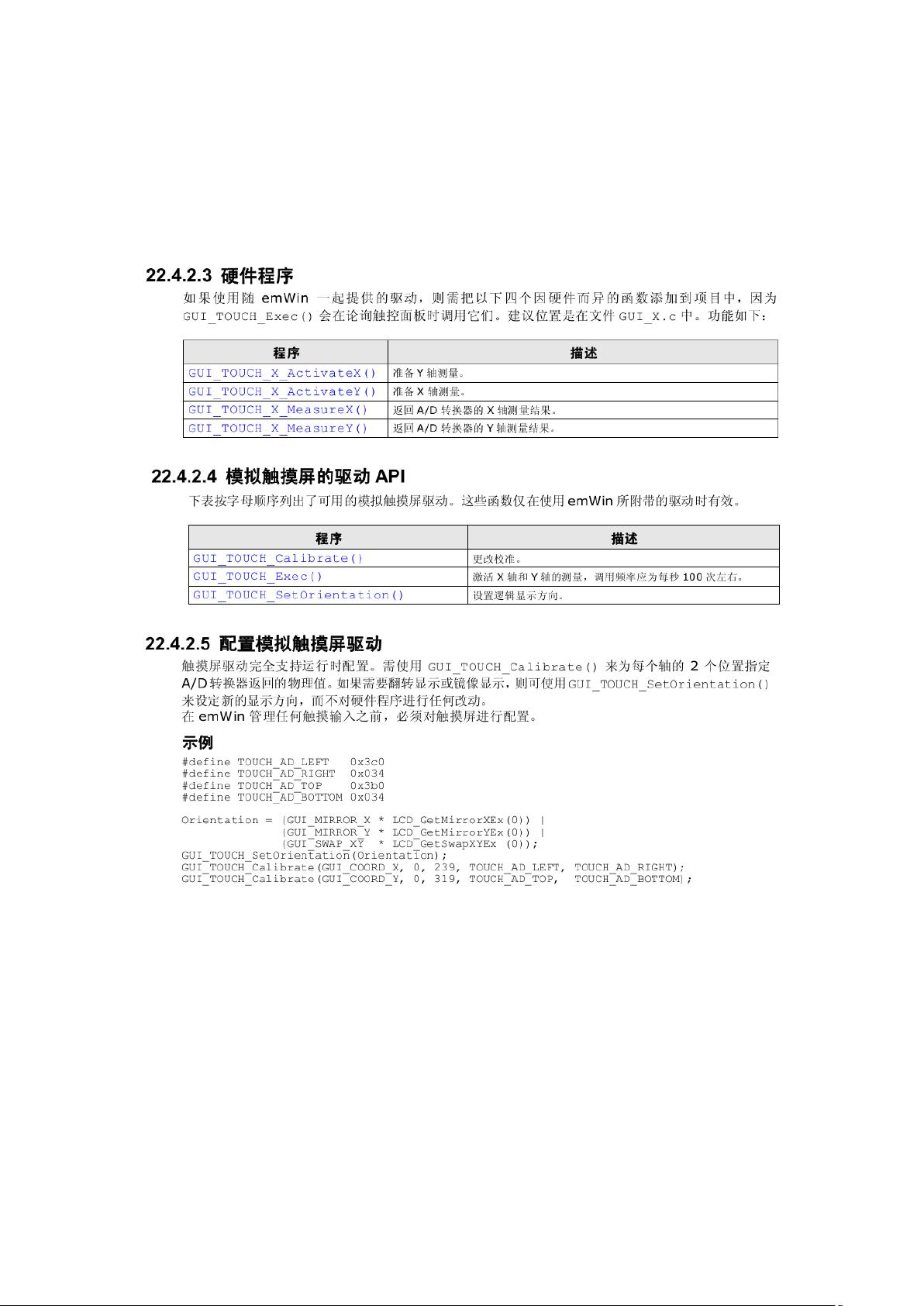
本文档主要介绍了STM32平台上的RTT_emWin移植以及触摸屏校准的详细步骤。首先,我们关注的是模拟触摸屏的测量部分,通过在"GUI_X_Touch_Analog.c"文件中定义的两个函数GUI_TOUCH_X_MeasureX和GUI_TOUCH_X_MeasureY,分别读取触摸屏的X和Y坐标。这些函数仅用于测量,而GUI_TOUCH_X_ActivateX和GUI_TOUCH_X_ActivateY函数则无需调用。
核心功能在于定期调用GUI_TOUCH_Exec()函数,该函数利用操作系统中的定时器机制,确保至少每秒钟执行100次,以实时跟踪触摸屏的触点位置和状态。这个过程需要在操作系统中创建一个独立的线程来管理定时任务。
接下来,文档详细讲述了触摸屏的校准过程。校准分为两个阶段:一是编写校准程序,通过获取显示区范围并绘制出来,以便获取校准值;二是运行时校准,通过定时器中断服务函数TIM5_IRQHandler()来实现。在这个函数中,每当计时器的更新间隔达到1.1ms时,OS_TimeMS变量递增,并在满足特定条件(如每10毫秒)时调用GUI_TOUCH_Exec()进行触控状态检测。
在初始化阶段,特别提到了在LCDConf.c文件中添加GUI_TOUCH_Calibrate()函数,用于完成触摸屏的初始校准。LCDConf.c的配置中包括设置红蓝色彩反转,通过GUI_DEVICE_CreateAndLink()函数指定驱动和颜色模式,以及设置XY坐标的交换,以适应特定硬件的需求。
本文档涵盖了STM32平台使用RTT_emWin库进行模拟触摸屏操作,定时更新触控信息,以及关键的触摸屏校准过程,这对于开发基于STM32的触摸控制应用具有很高的参考价值。开发者需要掌握如何配置定时器,处理触摸数据,以及如何进行准确的触摸校准,以确保系统的稳定性和用户交互体验。
if(OS_TimeMS % 10 == 0)
{
GUI_TOUCH_Exec(); //2.10ms 调用 GUI_TOUCH_Exec
}
}
}
5.初始化中添加 GUI_TOUCH_Calibrate()函数
在 LCDConf.c 中:
剩余19页未读,继续阅读
2022-09-14 上传
2023-05-24 上传
2023-06-02 上传
2023-04-21 上传
2023-07-25 上传
2023-11-12 上传
2023-07-25 上传
2023-03-29 上传
2023-05-26 上传

wxb0cf756a5ebe75e9
- 粉丝: 25
- 资源: 283
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机人脸表情动画技术发展综述
- 关系数据库的关键字搜索技术综述:模型、架构与未来趋势
- 迭代自适应逆滤波在语音情感识别中的应用
- 概念知识树在旅游领域智能分析中的应用
- 构建is-a层次与OWL本体集成:理论与算法
- 基于语义元的相似度计算方法研究:改进与有效性验证
- 网格梯度多密度聚类算法:去噪与高效聚类
- 网格服务工作流动态调度算法PGSWA研究
- 突发事件连锁反应网络模型与应急预警分析
- BA网络上的病毒营销与网站推广仿真研究
- 离散HSMM故障预测模型:有效提升系统状态预测
- 煤矿安全评价:信息融合与可拓理论的应用
- 多维度Petri网工作流模型MD_WFN:统一建模与应用研究
- 面向过程追踪的知识安全描述方法
- 基于收益的软件过程资源调度优化策略
- 多核环境下基于数据流Java的Web服务器优化实现提升性能
