"围棋机器人手臂设计:实现高效稳定动作的关键"
版权申诉
84 浏览量
更新于2024-02-25
1
收藏 917KB DOC 举报
机器人手臂在围棋机器人系统中扮演着至关重要的角色。随着围棋在全球范围内的流行和普及,围棋机器人系统的开发具有巨大的市场潜力。然而,相比象棋和国际象棋机器人,围棋机器人的研究和开发还相对滞后,其中的人机交互功能也有待提高。这主要源于围棋的独特性,如棋盘复杂、棋子位置随机、特殊对弈规则等因素带来了动作控制系统的挑战。因此,本文设计了一款下围棋机器人手臂,旨在实现机器人动作的人性化、高效和稳定。
首先,机器人手臂的设计需要考虑到围棋对弈中的特殊要求,如高精度的棋子定位、棋子的抓取和放置、提子的装置等。在设计过程中,必须结合图像识别技术和闭环系统,以确保机器人手臂能够准确地识别棋子的位置并进行相应操作。同时,考虑到围棋的对弈规则复杂多样,机器人手臂需要具备灵活的动作控制能力,以应对不同情况下的棋局变化。
其次,机器人手臂的人机交互功能也是设计的重点之一。通过优化手臂的设计,可以提高机器人与人类玩家之间的互动体验。例如,在提子和放置棋子的过程中,机器人手臂应该表现出流畅、自然的动作,同时保持稳定和高效。这不仅可以提升用户体验,还能增加机器人的可接受程度和实用性。
最后,针对围棋机器人手臂作为高科技玩具开发而未被充分重视的现状,应该加强对其实际应用的研究和推广。通过将机器人手臂与围棋人工智能程序相结合,可以实现更加智能化和自动化的下棋过程,从而吸引更多的围棋爱好者和玩家参与其中。同时,加强对机器人手臂的研究和开发,不仅可以推动围棋机器人系统的进步,也能够推动整个围棋产业的发展,为围棋文化的传播和推广作出贡献。
综上所述,下围棋机器人手臂的设计和研究具有重要的意义和价值。通过不断改进和优化机器人手臂的设计,可以提升围棋机器人系统的整体性能,促进机器人技术在娱乐领域的应用和发展。希望在未来的研究中,可以进一步完善机器人手臂的功能和性能,实现机器人与人类玩家之间更加紧密和深入的互动,为围棋机器人系统的发展开辟新的空间和可能性。
2. 总体方案
机器人的机械部分通常包括执行机构和驱动装置。
执行机构即机器人本体,为了让机器人能够自己抓放棋盘内所有位置的棋子,机器
人手臂须到达任意棋盘上点的上方,并且可以到达棋篓所在位置的上方以及完成靠进期
盼的垂直方向的动作。手爪部分为了能够顺利抓取棋子,并且保持在运动中棋子不会掉
落,所以要求手爪要足够细巧且结实,并能完成 90 度的旋转。由于棋盘空间限制,同
时要求机械部分占用空间不能过大。
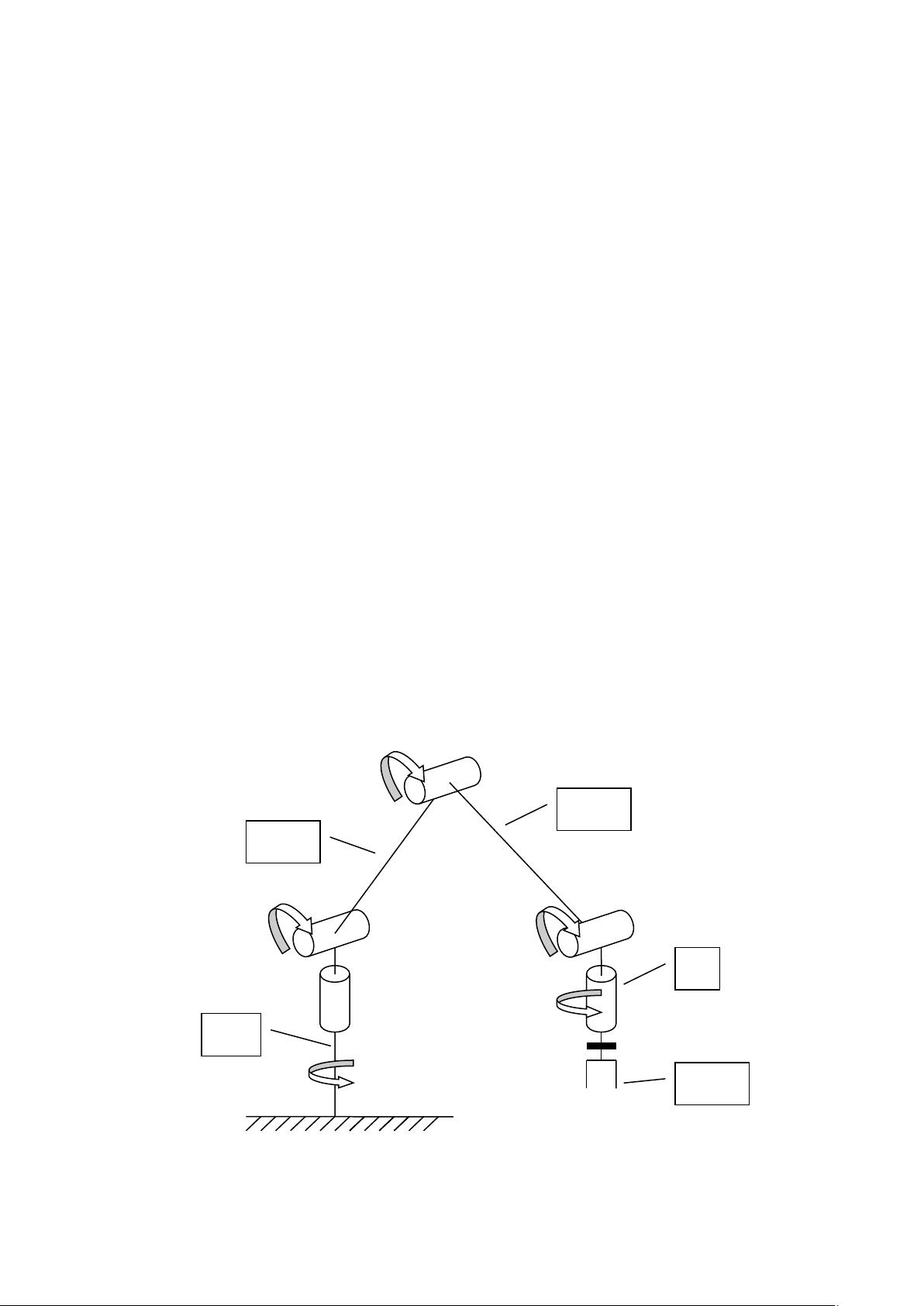
其臂部一般采用空间开链连杆机构,其中的运动副(转动副或移动副)常称为关节,
关节个数通常即为机器人的自由度数。根据关节配置型式和运动坐标形式的不同,机器
人执行机构可分为直角坐标式、圆柱坐标式、极坐标式和关节坐标式等类型。出于拟人
化的考虑,常将机器人本体的有关部位分别称为基座、腰部、臂部、腕部、手部(夹持
器或末端执行器)和行走部(对于移动机器人)等。
驱动装置是驱使执行机构运动的机构,为了使机器人在运动中能够到达系统指定的
位置且在运动中棋子不掉落,要求机器人手臂及手爪的驱动装置运动平稳,惯性小,可
控性高,最好具有反馈功能。
按照控制系统发出的指令信号,借助于动力元件使机器人进行动作。它输入的是电
信号,输出的是线、角位移量。机器人使用的驱动装置主要是电力驱动装置,如步进电
机、伺服电机等,此外也有采用液压、气动等驱动装置。
2.1. 电机种类的选择及传动方案的确定
2.1.1. 驱动电机种类的选择
关节机器人驱动系统包括驱动器和传动机构,它们常和执行机构联成一体,驱动臂
杆和载荷完成动作。通常的驱动方式有四种:
(1) 步进电机驱动:可以直接实现数字控制、控制结构简单、控制性能好,而且成本低
廉。通常不需要反馈就能对位置和速度进行控制。但这也是他的缺点,由于采用开
环控制,没有误差校正的能力,故而运动精度较差,负载和冲击震动过大时会造成
“失步”的现象。
(2) 直流伺服电机驱动:直流伺服电机有很好的调速特性,较大的启动力矩,相对较大
的功率及快速响应等特点,并且控制技术成熟。其安装维修方便,成本低廉。
(3) 交流伺服电机驱动:交流伺服电机结构简单,运行可靠,使用方便,与步进电机相
比要贵一些。随着可关断晶闸管 GTO,大功率晶闸管 GTR、场效应管 MOSFET 等
电力电子器件、脉冲调宽技术(PWM)和计算机控制技术的发展,交流伺服电机在调
速性能方面已经可以与直流电机相媲美。
剩余47页未读,继续阅读
2013-01-16 上传
2023-06-02 上传
2023-06-02 上传
2024-06-20 上传
2023-03-25 上传
2023-02-10 上传
2023-05-24 上传

老帽爬新坡
- 粉丝: 92
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言快速排序算法的实现与应用
- KityFormula 编辑器压缩包功能解析
- 离线搭建Kubernetes 1.17.0集群教程与资源包分享
- Java毕业设计教学平台完整教程与源码
- 综合数据集汇总:浏览记录与市场研究分析
- STM32智能家居控制系统:创新设计与无线通讯
- 深入浅出C++20标准:四大新特性解析
- Real-ESRGAN: 开源项目提升图像超分辨率技术
- 植物大战僵尸杂交版v2.0.88:新元素新挑战
- 掌握数据分析核心模型,预测未来不是梦
- Android平台蓝牙HC-06/08模块数据交互技巧
- Python源码分享:计算100至200之间的所有素数
- 免费视频修复利器:Digital Video Repair
- Chrome浏览器新版本Adblock Plus插件发布
- GifSplitter:Linux下GIF转BMP的核心工具
- Vue.js开发教程:全面学习资源指南
