斯坦福大学EE267虚拟现实课:惯性测量单元与姿态追踪
需积分: 7 16 浏览量
更新于2024-07-16
收藏 3.31MB PDF 举报
"Stanford大学的讲座9,主要讲解了惯性测量单元(IMU)的相关知识,包括坐标系统、惯性传感器(陀螺仪、加速度计、磁力计)、姿态跟踪、平面内的方向追踪、如何从加速度计获取俯仰和翻滚角度,以及VRduino简介。讲座还提到了在虚拟现实中,如何通过IMU模型追踪头部或其他设备的相对旋转,并介绍了欧拉角和四元数来表示旋转。"
在Stanford大学的EE267虚拟现实课程的第九次讲座中,讲师Gordon Wetzstein深入讨论了惯性测量单元(IMU)的应用和原理。首先,他阐述了坐标系统的概念,包括世界坐标系、物体或传感器坐标系以及惯性坐标系,以及它们之间的转换。理解这些坐标系统对于正确解读传感器数据至关重要。
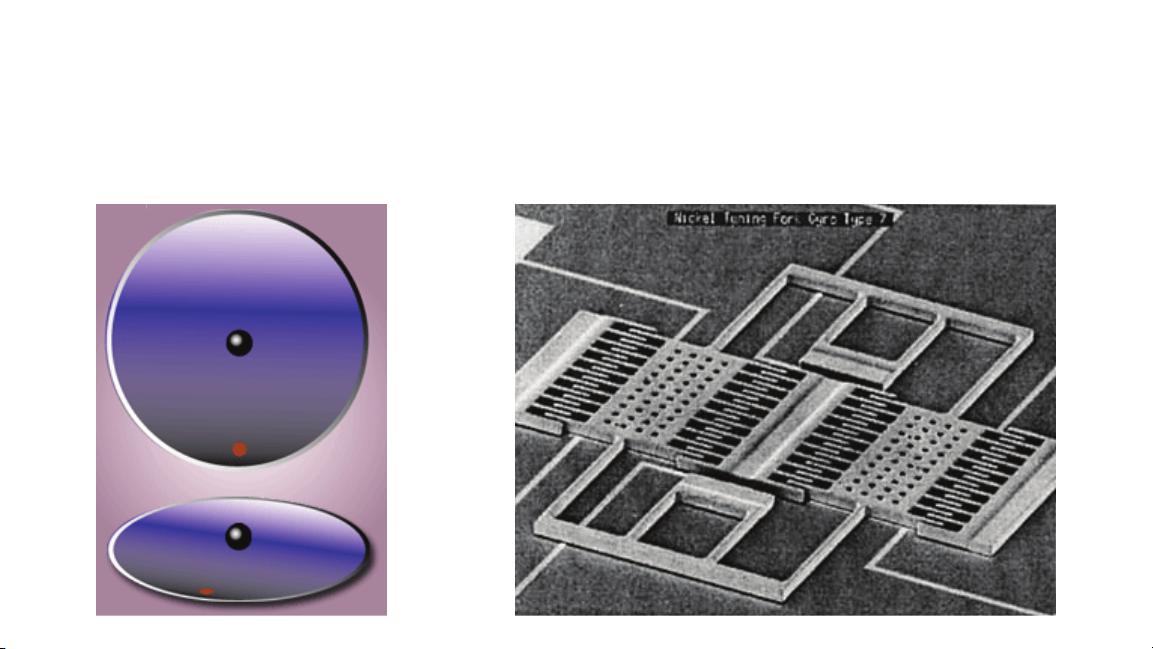
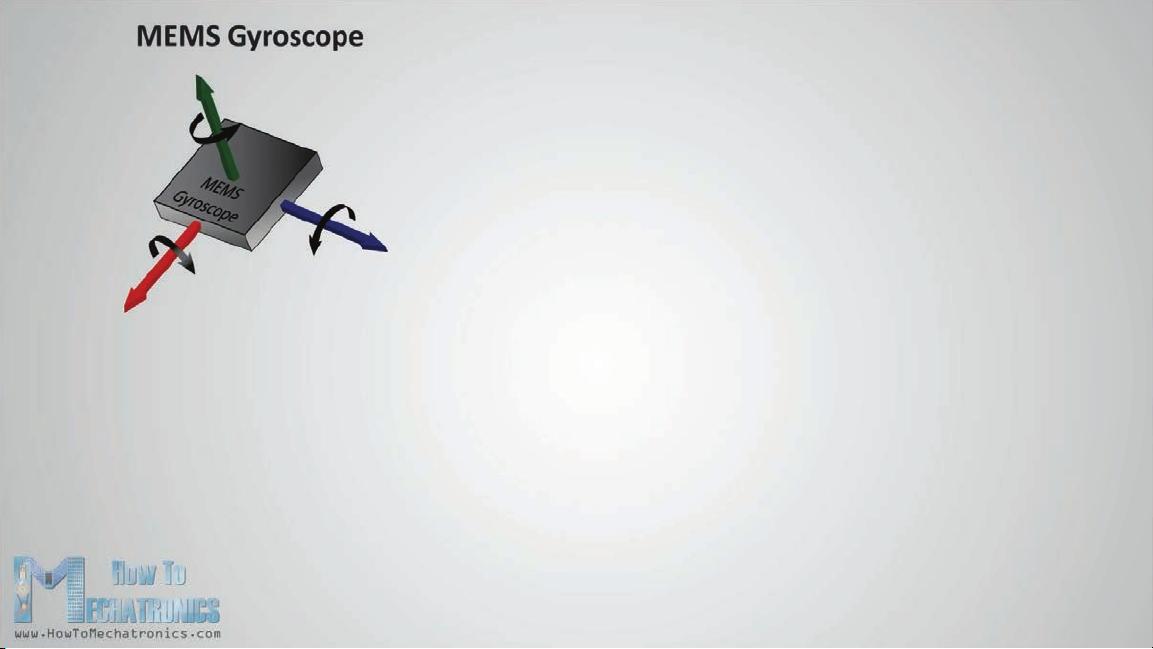
接着,讲座重点介绍了惯性传感器的三种主要类型:陀螺仪、加速度计和磁力计。陀螺仪用于测量角速度,即设备旋转的速度,单位通常是度每秒(°/s)或弧度每秒(rad/s)。加速度计则用来检测线性加速度,例如重力加速度,有助于确定设备的倾斜角度。磁力计则用于感知地球磁场,帮助确定设备的磁北方向。
讲座中探讨了陀螺仪数据的积分(gyro integration)和dead reckoning技术,这是通过连续累计陀螺仪的角速度来估算设备的绝对姿态。然而,由于累积误差,长时间依赖陀螺仪数据可能会导致较大的偏差。
为了在二维平面上进行方向跟踪,讲解了如何从加速度计数据中提取俯仰(pitch)和翻滚(roll)角度。俯仰是设备相对于水平面的上仰或下倾角度,而翻滚是设备绕垂直轴的侧翻角度。在实际应用中,通常会结合加速度计和陀螺仪的数据来提高姿态估计的精度。
此外,讲座还介绍了VRduino,这是一个专为虚拟现实应用设计的小型开发平台,其主要目标是追踪头部或其他设备的相对旋转,从而提供更真实的沉浸式体验。设备的旋转通常用欧拉角(yaw、pitch、roll)或四元数来表示,其中欧拉角直观易懂,而四元数则在避免万向锁问题和计算效率上具有优势。
最后,讲座通过实例展示了在虚拟现实中,如何通过IMU模型追踪传感器相对于世界坐标系的相对旋转。这在现代VR头显如Oculus中扮演着关键角色,确保用户在虚拟环境中的移动和转动能够与真实世界保持一致。
这次讲座为理解IMU的工作原理及其在虚拟现实中的应用提供了丰富的知识,对于从事VR或运动追踪技术的学习者来说是一份宝贵的资源。

What do Inertial Sensors Measure?!
•! gyroscope measures angular velocity in degrees/sec!
•! accelerometer measures linear acceleration in m/s
2!
•! magnetometer measures magnetic field strength in uT
(micro Tesla) or Gauss ! 1 Gauss = 100 uT!
!
!
a
!
m
!
•
gyroscope measures
angular velocity in degrees/sec
•
accelerometer measures linear acceleration in m/s
2
•
magnetometer measures magnetic field strength in
uT
(micro Tesla) or Gauss
!
1 Gauss = 100
uT
angular velocity in degrees/sec
!
angular velocity in degrees/sec
!
!
accelerometer measures linear acceleration in m/s
a
accelerometer measures linear acceleration in m/s
!
magnetometer measures magnetic field strength in
m
magnetometer measures magnetic field strength in
!
剩余82页未读,继续阅读
2023-02-07 上传
2023-04-11 上传
2023-06-11 上传
2023-02-22 上传
2023-05-09 上传
2023-07-30 上传
2023-05-18 上传
2023-06-04 上传
2023-02-22 上传

xxxxx___1
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 多模态联合稀疏表示在视频目标跟踪中的应用
- Kubernetes资源管控与Gardener开源软件实践解析
- MPI集群监控与负载平衡策略
- 自动化PHP安全漏洞检测:静态代码分析与数据流方法
- 青苔数据CEO程永:技术生态与阿里云开放创新
- 制造业转型: HyperX引领企业上云策略
- 赵维五分享:航空工业电子采购上云实战与运维策略
- 单片机控制的LED点阵显示屏设计及其实现
- 驻云科技李俊涛:AI驱动的云上服务新趋势与挑战
- 6LoWPAN物联网边界路由器:设计与实现
- 猩便利工程师仲小玉:Terraform云资源管理最佳实践与团队协作
- 类差分度改进的互信息特征选择提升文本分类性能
- VERITAS与阿里云合作的混合云转型与数据保护方案
- 云制造中的生产线仿真模型设计与虚拟化研究
- 汪洋在PostgresChina2018分享:高可用 PostgreSQL 工具与架构设计
- 2018 PostgresChina大会:阿里云时空引擎Ganos在PostgreSQL中的创新应用与多模型存储
