C8051F30X系列SPI主模式程序实例
需积分: 0 201 浏览量
更新于2024-07-24
收藏 841KB PDF 举报
"这篇文档详细介绍了SPI协议的原理、时序和应用,并提供了一系列的SPI主模式传输实例,适用于CYGNAL的C8051F30X系列微控制器。文档涵盖了SPI的硬件接口、时钟相位和极性的编程实现,以及如何通过C语言调用汇编代码以提高效率。"
SPI协议是一种广泛应用的同步串行通信接口,由摩托罗拉公司开发。它允许单主设备与多个从设备之间进行全双工通信。在SPI总线中,主要定义了以下几个引脚:
1. MOSI(Master Out, Slave In):主设备的数据输出,从设备的数据输入。
2. MISO(Master In, Slave Out):主设备的数据输入,从设备的数据输出。
3. SCK(Serial Clock):由主设备产生的时钟信号,控制数据传输的节奏。
4. NSS(Slave Select,有时也称为CS或SS):从设备的选择信号,通常为主设备输出,用于选通特定的从设备。
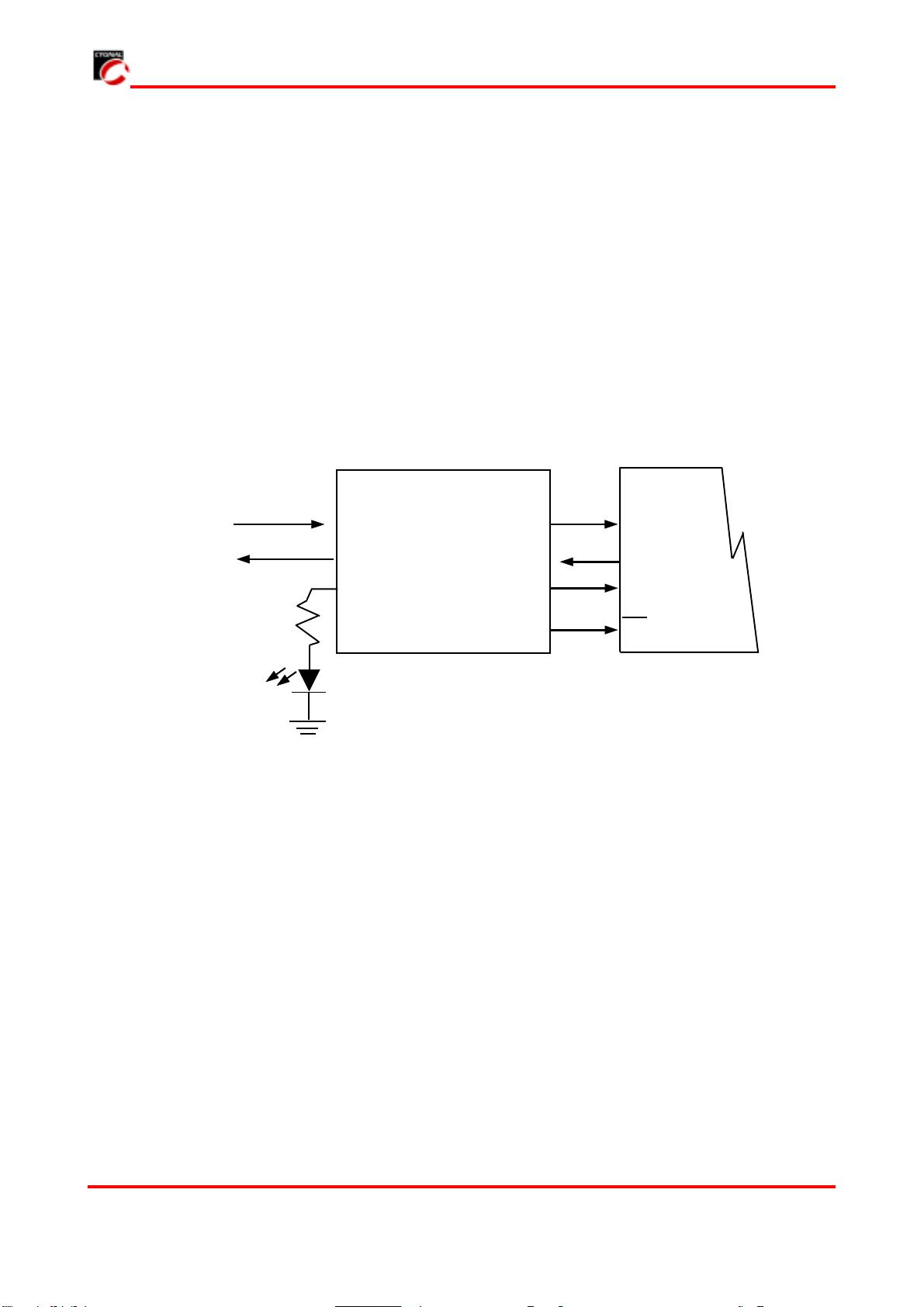
本文档中的SPI实例主要针对C8051F30X系列微控制器,这是一种8位微控制器,可以作为SPI总线的主设备。硬件接口部分提到,这些实例使用通用IO引脚模拟SPI接口,其中MOSI和SCK设置为推挽输出,MISO则设置为开漏输入,以适应SPI通信的要求。如果需要从设备选择信号,还需要额外的推挽输出引脚。
为了实现SPI通信,文档提供了一些关键函数的描述,包括如何控制SPI时钟的相位和极性,这是SPI通信的重要参数,它们决定了数据在时钟上升沿还是下降沿被采样。文中提供了C语言和汇编语言编写的例程,后者用于提高SPI操作的速度。在"函数描述"部分,可能包含了初始化SPI接口、设置SPI模式、发送和接收数据的具体函数及其工作原理。
SPI协议支持四种不同的模式,由CPOL(Clock Polarity,时钟极性)和CPHA(Clock Phase,时钟相位)两个参数决定,它们组合起来可以改变数据采样的时机,以适应不同设备的需求。例如,CPOL=0表示时钟空闲时为低电平,CPHA=0表示数据在时钟的前半周期被采样,而CPHA=1则表示在后半周期采样。
这个资源提供了SPI协议的实际应用案例,对理解SPI工作原理和编程实现非常有帮助,尤其对于使用C8051F30X系列微控制器的开发者来说,能够直接参考这些实例进行硬件接口的配置和SPI通信的软件设计。
AN028-C8051F30X 系列软件 SPI例子
6 AN028 - 1.0 DEC01
101
. 2001 Cygnal Integrated Products, Inc.
SPI_EE_F30x.c
SPI_EE_F30x.c SPI
SPI EEPROMMicrochip
25LC320 EEPROM SPI
O 3 SPI
FLASH
EEPROM
EEPROM
P0.6
EEPROM
PC 115,200
8 1
RS-232
UART5 C8051F30x
EEPROM
5.EEPROM
剩余27页未读,继续阅读
189 浏览量
2010-10-09 上传
2009-04-05 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-01-10 上传

chenzhuming
- 粉丝: 4
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- AirKiss技术详解:无线传递信息与智能家居连接
- Hibernate主键生成策略详解
- 操作系统实验:位示图法管理磁盘空闲空间
- JSON详解:数据交换的主流格式
- Win7安装Ubuntu双系统详细指南
- FPGA内部结构与工作原理探索
- 信用评分模型解析:WOE、IV与ROC
- 使用LVS+Keepalived构建高可用负载均衡集群
- 微信小程序驱动餐饮与服装业创新转型:便捷管理与低成本优势
- 机器学习入门指南:从基础到进阶
- 解决Win7 IIS配置错误500.22与0x80070032
- SQL-DFS:优化HDFS小文件存储的解决方案
- Hadoop、Hbase、Spark环境部署与主机配置详解
- Kisso:加密会话Cookie实现的单点登录SSO
- OpenCV读取与拼接多幅图像教程
- QT实战:轻松生成与解析JSON数据
