
410
S. Ghuku
,
K.N.Saha/Engineering Science and Technology
,
an International Journal 21
(
2018
)
408
e
e
e
e
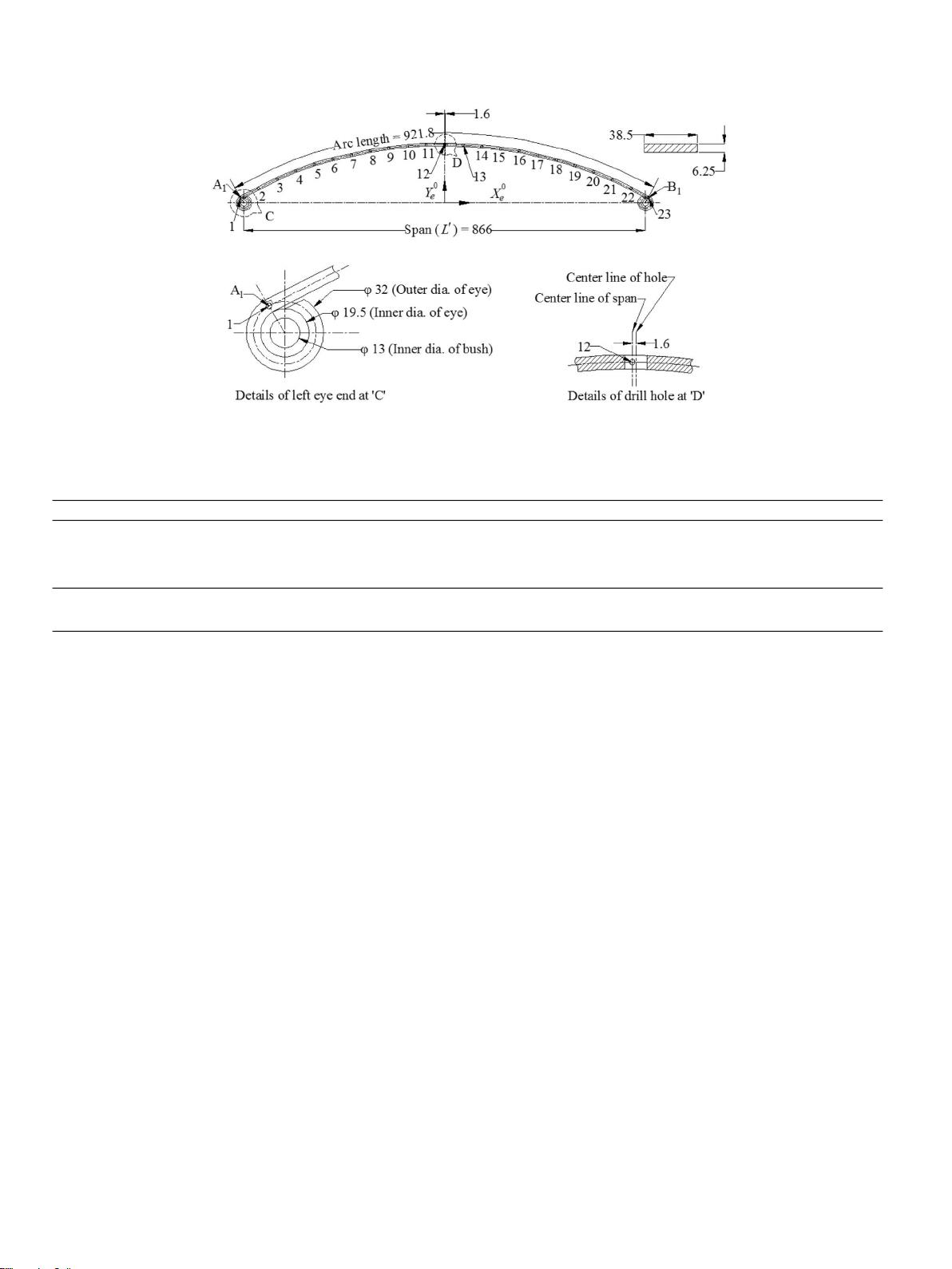
Fig. 1. 主板簧在自由状态下的外形(所有尺寸单位为mm)。
表
1
自由状态下主叶片轮廓的数字表示:(
X
0
;
Y
0
)
23
个标记点的坐标(单位:
mm
),相对于中跨原点
e
e
Loc. 1 2 3 4 5 6 7 8 9 10 11 12
电话:
+86
-21 - 88888888传真:+86-21 - 88888888
电话:
+86-10
- 8888888传真:+86-10 - 8888888
Loc. 13 14 15 16 17 18 19 20 21 22 23
电话:
021 - 88888888
传真:
021 - 88888888
0
128 125 121 115 106.5 97 84 68.5 52 32.5 11.5
在加载条件下的几何测量中使用物理试样作为参考将负载连接器的突
出部分插入主叶片的孔中,并将开槽盘(项目
4
)放置在负载连接器
上,以在叶片弹簧上施加静负载垂直导杆通过加载盘的槽安装到负
载连接器上,并通过安装在导盘(部件
3
)上的衬套(部件
2
)沿垂
直方向平稳移动因此,导杆只允许加载点的垂直运动,并限制载荷
施加线的水平运动因此,所施加静载荷的中心线始终沿孔中心作
用,并在主板簧上产生相对于中跨垂直线的偏心载荷 由于滚柱支架中
存在滚珠轴承(项目
13
)(参见图
2
(
b
)),静载荷的施加导致主
叶片的每一半围绕垂直载荷线的无摩擦水平运动,这在实验上模拟了
具有移动边界的梁模型。
试验过程中,静荷载按七步递增至极限荷载,极限荷载按Winkler-
Bach梁理论的解析表达式计算。在极限载荷计算中,钢板弹簧材料屈服
应力值的75%作为许用载荷。第一个载荷步骤来自垂直导杆和载荷连接
器的重量,没有施加任何外部自重,因此该步骤被称为预载荷(8.5
N)。其他六个载荷阶跃为84.1、159.6、235.2、310.7、
385.2
和
470.6
(
N
)。加载条件下主叶片挠度曲线的实验测量不像空
载曲线那样直接,并在以下小节中给出
2.1.
偏转轮廓
加载条件下主板簧的挠度曲线通过两种不同的技术确定
测量技术和图像处理技术。在加载条件下直接测量几何形状所需的基本
仪器包括:直尺(C项)、铅锤(A项)和游标高度规(B项)。固定铅
锤指针(项目12)通过垫片连接到每个滚轮支架的销上 和螺纹紧固
(参见图2(b))。为了测量这些固定铅锤指针的水平运动,将两把钢
尺放置在铸铁底座的凹槽中。这两条钢铁规则 直角坐标系(
Xe
;
Ye
),
Ye
轴沿垂直载荷线,
Xe
轴为两滚子中心在中平面处的虚直线。在一个特定
的负载步骤,位置的固定铅锤指针在(X
e
;Y
e
)框架给出跨度的主叶,而
拱度是测量使用游标高度计。使用通用铅锤和高度规(补充表S1)测量
标记点的横坐标和纵坐标,从而给出主叶片在负载条件下的挠度曲线。
在图3中用点表示在七个载荷阶跃中的每一个阶跃下直接测量得到的主
叶片的挠度曲线。由于存在箱形结构,无法对一些中间点(1、6-8、
15、16和21)进行直接轮廓测量。该图还包括从照片中获得的相应挠度
曲线,并在下面的段落中简要讨论间接测量技术的后处理。
在实验过程中,主板簧的照片是
使用数码相机在每个加载步骤捕获并存储(补充图S2)。每张照片都作
为AutoCAD
®
的背景,并通过将刺孔标记点连接为样条拟合曲线来绘制
加载主板簧的中心线。与直接测量挠度曲线的情况一样,笛卡尔坐标系
的原点(X
e
;Y
e
)被认为是在垂直载荷线和滚子中心之间的水平线的交点
处。现在,AutoCAD
®
图形已缩放
X
Y
X
Y
剩余14页未读,继续阅读

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- AirKiss技术详解:无线传递信息与智能家居连接
- Hibernate主键生成策略详解
- 操作系统实验:位示图法管理磁盘空闲空间
- JSON详解:数据交换的主流格式
- Win7安装Ubuntu双系统详细指南
- FPGA内部结构与工作原理探索
- 信用评分模型解析:WOE、IV与ROC
- 使用LVS+Keepalived构建高可用负载均衡集群
- 微信小程序驱动餐饮与服装业创新转型:便捷管理与低成本优势
- 机器学习入门指南:从基础到进阶
- 解决Win7 IIS配置错误500.22与0x80070032
- SQL-DFS:优化HDFS小文件存储的解决方案
- Hadoop、Hbase、Spark环境部署与主机配置详解
- Kisso:加密会话Cookie实现的单点登录SSO
- OpenCV读取与拼接多幅图像教程
- QT实战:轻松生成与解析JSON数据
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


