机器人领域刚体空间变换解析
需积分: 0 97 浏览量
更新于2024-08-05
收藏 862KB PDF 举报
"第二章 刚体空间变换1 - 追风少年 - 2016/12/29"
在定位导航和机器人技术中,理解和掌握刚体空间变换至关重要,因为它们涉及到物体在三维空间中的精确位置和姿态描述。刚体变换是描述刚体在空间中运动的基础,它包括平移和旋转,常用于机器人路径规划、视觉定位以及传感器数据融合等领域。
1. 笛卡尔坐标与右手法则
笛卡尔坐标系统是三维空间中最常见的坐标表示方式,通过X、Y、Z三个相互垂直的轴定义点的位置。右手法则则是确定轴之间正交关系的标准方法,用于统一坐标系的建立。在右手坐标系中,拇指代表X轴,食指代表Y轴,中指代表Z轴,确保了旋转方向的一致性,即逆时针旋转为正。
2. 坐标系
- 载体坐标系(Body Coordinate):通常以移动对象的前进方向为X轴,右侧为Y轴,下方为Z轴。这适用于描述物体自身的运动和测量。
- 世界坐标系(Earth Coordinate):如ENU坐标系(East, North, Up),常用于地理定位,其中X轴指向正东,Y轴指向正北,Z轴指向上方。世界坐标系提供了全局参考,用于比较和集成来自不同来源的数据。
3. 空间变换
空间变换是将物体在载体坐标系中的坐标转换为世界坐标系的过程,以实现不同坐标系间的兼容。这通常涉及平移(Translation)和旋转(Rotation)两种操作。例如,刚体的旋转可以通过欧拉角、四元数或旋转矩阵来描述,而平移则通过一个向量表示。变换通常由一个变换矩阵表示,它可以组合旋转和平移,形成一个从载体坐标系到世界坐标系的映射。
3.1 旋转
- 欧拉角:通过三个旋转角度(如 yaw-pitch-roll 或 roll-pitch-yaw)描述物体的旋转,每个角度对应一个轴的旋转。
- 四元数:一种更稳定且避免万向锁问题的旋转表示,由实部和三个虚部构成,可表示任意角度的旋转。
- 旋转矩阵:3x3的矩阵,每行和每列都是单位向量,表示坐标轴的旋转。
3.2 平移
平移是一个3D向量,表示物体在三个坐标轴上的位移。
在实际应用中,使用开源库进行开发时,必须注意库函数中使用的坐标系和基准,以防止因坐标系不匹配导致的计算错误。例如,有些库可能使用左手坐标系,或者旋转方向与标准相反,因此在调用API前需要仔细阅读文档并进行必要的转换。
总结,刚体空间变换是定位导航和机器人技术中的核心概念,理解并正确应用这些变换对于确保系统准确性和可靠性至关重要。无论是进行路径规划、传感器数据融合,还是进行三维可视化,都需要深入理解和熟练掌握这些基础知识。
设空间
A
R
下的一组单位正交基为
1 1 1
{ , , }i j k
,
B
R
下的一组单位正交基为
2 2 2
{ , , }i j k
, 则
{}B
坐标系下的基坐标在坐标系
{}A
下的表示为
A
11 2 21 2 31 2 1
A
12 2 22 2 32 2 1
A
13 2 23 2 33 2 1
x
z
B
B
B
r i r j r k i
y r i r j r k j
r i r j r k k
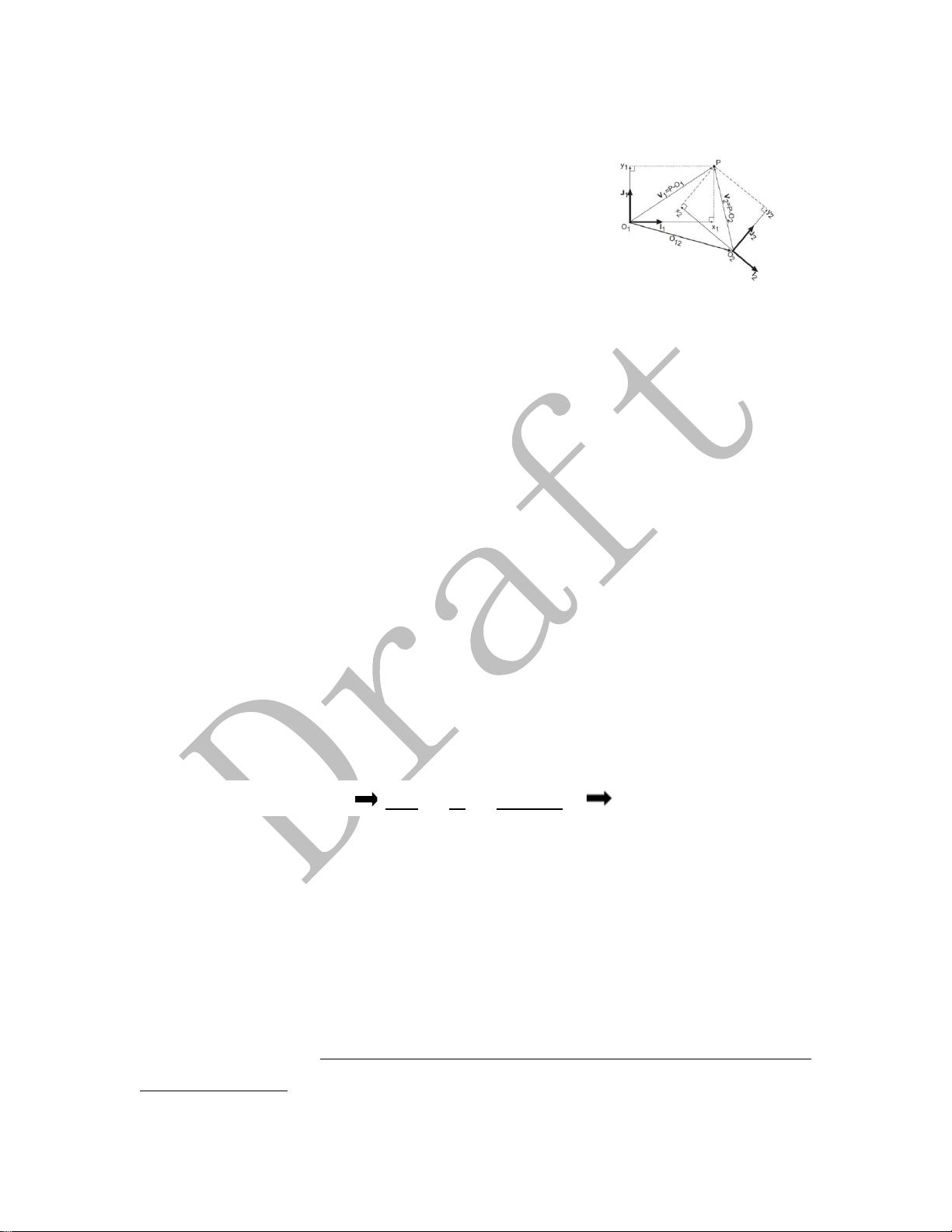
由空间变换的定位可知,使用不同基坐标观测一个矢量,会在不同的度量空间下得到不同
的表示,而空间变换的意义就在于能够建立两个空间的连接,即旋转矩阵
R
。
11 12 13
A A A A
21 22 23
31 32 33
R =[ x , , ]=
x x x
B B B B y y y
z z z
r r r n o a
y z r r r n o a n o a
r r r n o a
显然,由向量空间旋转知,
A
R
B A B
Rotation
表示为作用于基坐标{A}到基坐标{B}的旋转;
A
R
B
作用于
{}B
下的坐标则得到由
{}A
基坐标构成的空间,称为坐标变换。
上式助记符,
A
R
B
的含义为
{}B
坐标系下的单位正交基在坐标系
{}A
下的表示。则如果需
要将{B}坐标系上的矢量表示为坐标系
{}A
,则
B
x
乘以这组正交基
A A A
[ x , , ]
B B B
yz
即可:
A
=R
AB
B
xx
其中,
A
R
B
表示刚体
B
相对于坐标系
A
的姿态的旋转矩阵。
Tips: 空间由一组正交基表示,则空间变换的核心当然就是这组正交基之间的关系,步骤
为
3.2 向量旋转与坐标系姿态
向量旋转是指在同一坐标系下,经过旋转后原向量与当前向量之间的变换关系,注重空间
位置关系。
坐标系姿态则是指同一观测量在不同坐标系(基元)下表示之间的变换关系,一般地需要将
其中一个基坐标旋转至另一个基坐标对齐。
从两者的定义来说,向量旋转描述的是旋转矩阵作用于空间向量而坐标系姿态则是旋转矩
阵作用于一组基坐标。不难发现,在数学表达形式上,旋转矩阵表达形式一致,其含义却大不
使用
{}A
表示
A
x
寻找
{}B
到
{}A
之间变换 使用
{}B
表示
A
x
剩余12页未读,继续阅读
134 浏览量
点击了解资源详情
150 浏览量
137 浏览量
137 浏览量
331 浏览量
571 浏览量
2021-09-17 上传
2013-08-19 上传

LauraKuang
- 粉丝: 23
- 资源: 334
 我的内容管理
展开
我的内容管理
展开







最新资源
- 极速PE u盘启动盘制作工具(xp内核) v6.1
- ember-cli-webcomponents-bundler:使用ES6模块捆绑Web组件
- 行业文档-设计装置-阶梯式弧形看台现浇装饰板的模板支撑体系及构建方法.zip
- Imperial Realms Standard Client-开源
- 2020TI杯模拟电子系统邀请赛现场u盘内容 包络电源
- Racer对Emacs的支持—自动完成(另请参阅公司和自动完成)-Rust开发
- gpsDataLogger-开源
- python 碎图合成脚本 附带说明文档
- 领域自适应文本挖掘工具(新词发现、情感分析、实体链接等),基于少量种子词和背景知识
- scripts:波格
- 行业文档-设计装置-一种平台.zip
- FJSP算例转化程序,需要指定文件位置带后缀的,xls,除了MK算例不能转化外,其他的算例都能转化
- 算法:算法문제풀이
- jql-JSON查询语言CLI工具-Rust开发
- Mobile_App_Look-Feel
- PYNQ-Z1中文入门指导手册及示例程序
