"自由网-郭丙轩_无人机影像处理解算流程与精度评定"
需积分: 9 2 浏览量
更新于2024-03-23
收藏 28.45MB PPT 举报
随着城市精细三维数据获取需求的不断增加,传统的卫星遥感和航空遥感技术面临着诸多限制,如分辨率不高、时相不稳定等问题。因此,无人机摄影测量(UAV)作为一种新兴的技术手段,受到了广泛关注。郭丙轩在其研究中探讨了无人机影像处理的解算流程,为利用无人机获取高质量遥感影像提供了一定的参考。
在无人机摄影测量的优势方面,首先是需求驱动。随着城市规划和监测等需要精细三维数据的日益增加,大比例尺、高分辨率的遥感影像需求越来越迫切。而传统的卫星遥感和航空遥感技术由于受限于回归周期和空域管制等因素,难以满足精细城市三维信息获取的要求。其次是技术驱动。无人机作为一种新型的遥感平台,具有无人驾驶、机动快速、成本低廉等优势,为城市三维信息获取提供了新的技术途径。
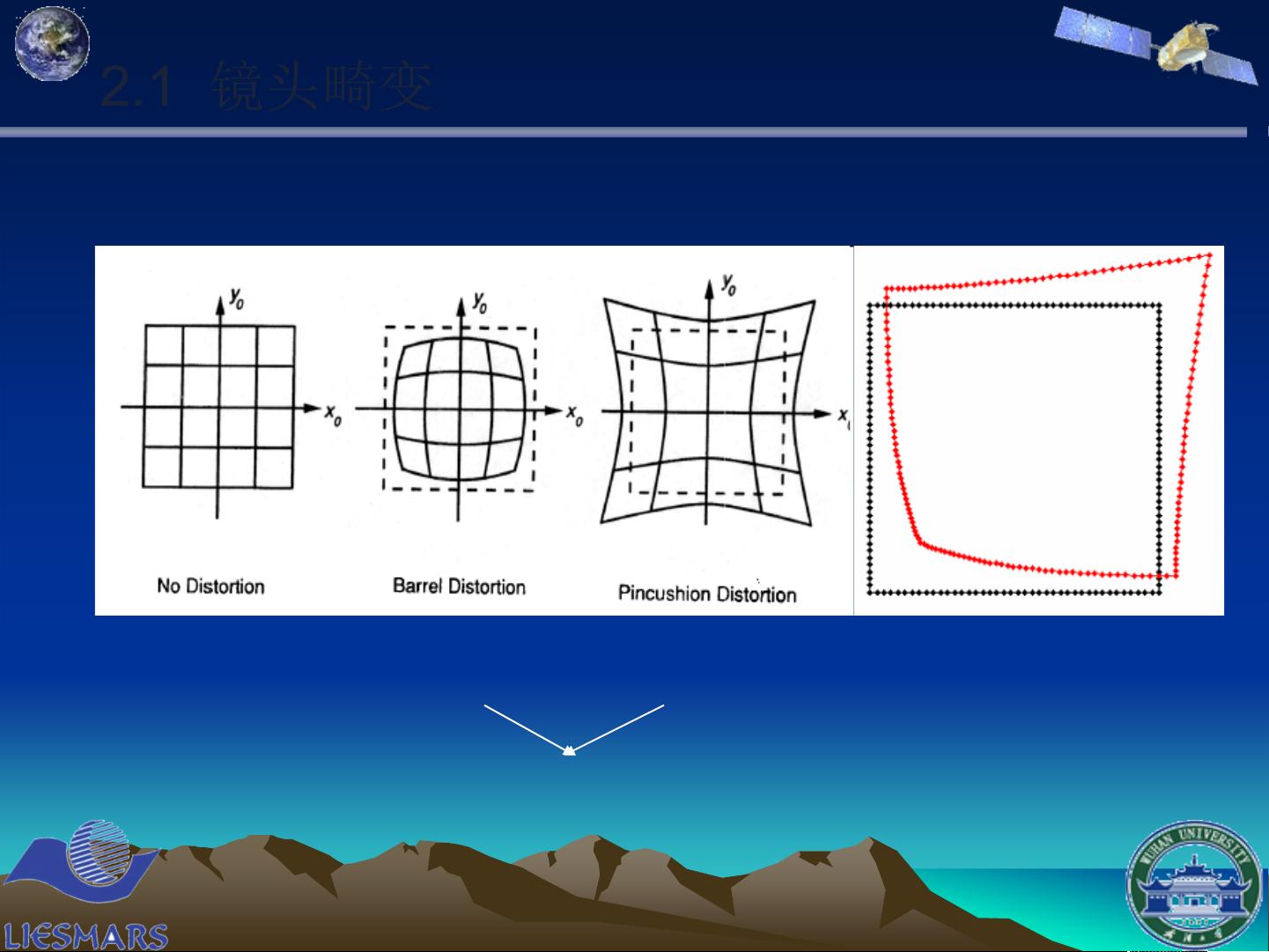
在无人机摄影测量的新起点上,郭丙轩以自由网、刺点、控制网、精度评定等技术作为基础,构建了一套完整的解算流程。首先,在解算流程中,自由网的建立是至关重要的一步。自由网能够减小外方位参数的相关性,提高像点的准确性和数据的稳定性,从而保证后续处理的精度。其次,刺点的选择和标定对于摄影测量结果的精度起着决定性作用。控制网的建立则能够为无人机摄影测量提供准确的地理参考框架,保证数据的准确性和可靠性。最后,通过残差图和精度评定等手段,可以对解算结果进行验证和评估,确保数据处理的可靠性和准确性。
在郭丙轩的研究中,除了探讨解算流程外,还对DEM和正射影像的生成功能进行了深入研究。DEM(数字高程模型)是无人机摄影测量的重要产品之一,能够提供地表的三维高程信息,对于城市规划和地质勘探等领域具有重要意义。正射影像则是通过对原始影像进行几何精校正和图像重采样等处理,提高了影像的空间几何精度和视觉效果,为后续的遥感分析和地图制图提供了可靠的数据基础。
总的来说,郭丙轩在无人机影像处理领域的研究成果为提高无人机遥感数据处理的精度和可靠性提供了有力的支持。通过对解算流程的详细研究,他提出了一套完整的处理方法,为无人机摄影测量技术在城市三维信息获取中的应用奠定了基础。未来,随着无人机技术的不断发展和完善,相信无人机摄影测量将在城市规划、环境监测等领域发挥越来越重要的作用,为人类社会的可持续发展做出更大的贡献。


2023-12-25 上传
2024-11-17 上传
2024-07-29 上传
2024-10-09 上传
2024-09-28 上传
2023-06-13 上传
2023-06-03 上传
2023-06-03 上传
2023-06-05 上传

欧学东
- 粉丝: 1018
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







