机器人运动学详解:正逆演算与D-H方法
机器人运动学是研究机器人如何在空间中运动和变换的技术,它是机器人技术的基础。在本章《机器人位置运动学》中,主要探讨了正逆运动学的概念。正运动学是指当已知所有关节变量时,通过计算得出机器人末端执行器(通常指机器人手臂末端的手部或工具)在空间中的精确位置和姿态。这包括了对直角坐标型、圆柱坐标型和球坐标型等不同机器人构型的分析,这些构型对应于不同的运动学模型。
逆运动学则是解决问题的反过程,即在给定机器人手部的特定位置和姿态时,求解所需的关节变量值。这对于控制机器人实现目标位置至关重要,因为这涉及到如何调整各个关节的角度来达到预定的机械行为。
机器手型机器人通常具有多个自由度(DOF),例如常见的三维开环链式机构。每个自由度代表一个可以独立控制的关节,如旋转或移动。单自由度系统中的参数一旦确定,其他变量也随之锁定,但在多自由度机器人中,如机器人手臂,需要设定所有关节变量才能精确地控制末端位置。
为了确保机器人在三维空间中的运动,机器人结构通常是三维的,与二维多自由度机器人相比更为罕见。开环机器人(如工业机器人)与闭环系统(如四杆机构)的主要区别在于,闭环系统能够提供位置反馈,而开环系统则不然。这意味着在开环机器人中,即使关节变量设定正确,微小的误差也会在后续环节放大,导致整体运动不准确。因此,开环系统需要实时监测和调整,通过比较向量方程来反映这种动态特性。
本章深入剖析了机器人正逆运动学的原理和应用,强调了在设计和控制机器人运动时,理解关节变量如何影响末端执行器的空间位置和姿态的重要性。对于机器人工程师和研究人员来说,掌握这些基本概念是至关重要的,因为它直接影响到机器人的精度和灵活性。
来坐标系的原点位置向量加上表示位移的向量求得。若用矩阵形式,新坐标系的表示可以通
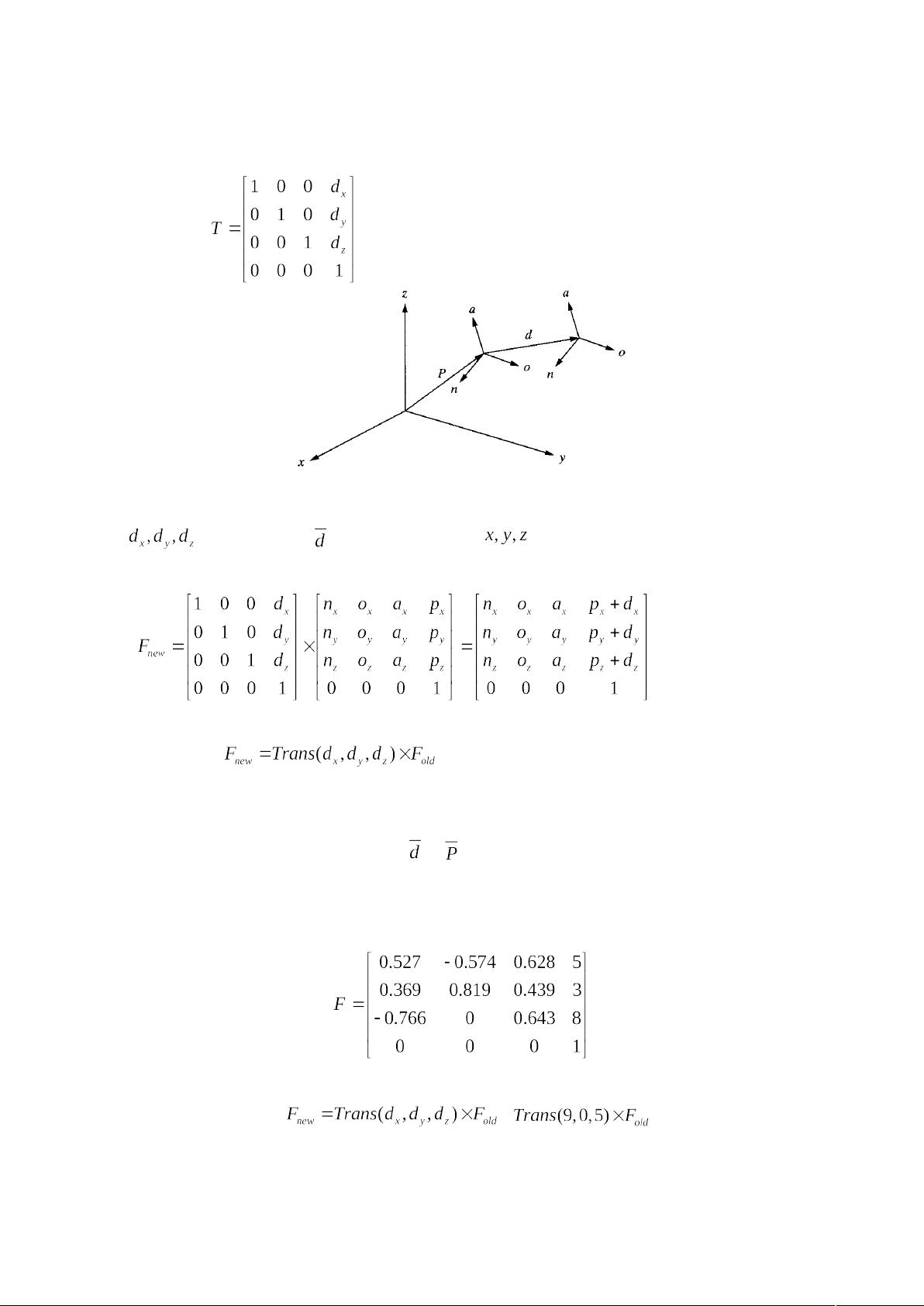
过坐标系左乘变换矩阵得到。由于在纯平移中方向向量不改变,变换矩阵 T 可以简单地表示
为:
(2.13)
图 2.9 空间纯平移变换的表示
其中 是纯平移向量 相对于参考坐标系 轴的三个分量。可以看到,矩阵的前
三列表示没有旋转运动(等同于单位阵),而最后一列表示平移运动。新的坐标系位置为:
(2.14)
这个方程也可用符号写为:
(2.15) 首先,如前
面所看到的,新坐标系的位置可通过在坐标系矩阵前面左乘变换矩阵得到,后面将看到,无
论以何种形式,这种方法对于所有的变换都成立。其次可以注意到,方向向量经过纯平移后
保持不变。但是,新的坐标系的位置是 和 向量相加的结果。最后应该注意到,齐次变换
矩阵与矩阵乘法的关系使得到的新矩阵的维数和变换前相同。
例 2.4 坐标系 F 沿参考坐标系的 x 轴移动 9 个单位,沿 z 轴移动 5 个单位。求新的坐标系位
置。
解:由式(2.14)或式(2.15)得:
= 和

剩余49页未读,继续阅读
2021-12-24 上传
2023-04-07 上传
2024-02-07 上传
2023-07-08 上传
2023-06-05 上传
2023-09-16 上传
2023-04-07 上传

longjiaoqiao
- 粉丝: 8
- 资源: 17
 我的内容管理
展开
我的内容管理
展开







最新资源
- AirKiss技术详解:无线传递信息与智能家居连接
- Hibernate主键生成策略详解
- 操作系统实验:位示图法管理磁盘空闲空间
- JSON详解:数据交换的主流格式
- Win7安装Ubuntu双系统详细指南
- FPGA内部结构与工作原理探索
- 信用评分模型解析:WOE、IV与ROC
- 使用LVS+Keepalived构建高可用负载均衡集群
- 微信小程序驱动餐饮与服装业创新转型:便捷管理与低成本优势
- 机器学习入门指南:从基础到进阶
- 解决Win7 IIS配置错误500.22与0x80070032
- SQL-DFS:优化HDFS小文件存储的解决方案
- Hadoop、Hbase、Spark环境部署与主机配置详解
- Kisso:加密会话Cookie实现的单点登录SSO
- OpenCV读取与拼接多幅图像教程
- QT实战:轻松生成与解析JSON数据
